芯片的pin 脚可以用作不同的功能,最常用的是作为GPIO,设置为输出模式时,通过高低电平来控制一些外围设置;
// 如LED,屏的电源,背光的开关,功放的静音等等。 除了控制设置之外,还需要和外部设置传输数据。
pin 作为GPIO 设置为IN时,是获取外设的高低来判断外设的状态,最常用的一些source 通道的detect,及一些wakeup 功能。
pin 作为SAR 口,获取ADC值; // 如按键板,参照“mstar平台SAR口使用”
pin 作为UART / SPI /SD 口;
pin 作为I2C 口;
一般来说,大部分有特殊功能的Pin脚其实都可以作为GPIO使用,当将其配置成特殊功能后,就不能同时配为GPIO。所以当发现某个Pin配成GPIO后,却没办法改变它的高低状态时,就要留意一下该Pin脚是否已经被误配为特殊功能了,这时就需要先DISABLE 掉这个特殊功能之后,才能设置成GPIO及其状态设定。每个chip有对应一个init GPIO配置,BD_MST{$Board}.h, drvpadconf.c
1、标准GPIO口配置
总共有4种状态:
#define GPIO_NONE 0 // Not GPIO pin (default) #define GPIO_IN 1 // GPI #define GPIO_OUT_LOW 2 // GPO output low #define GPIO_OUT_HIGH 3 // GPO output high
2、特殊口配置
(1)uart 口配置,特殊功能的pin需要在BD_MST{$Board}.h 中配置,如:BD_MST160D_10ABQM_M7221.h
#define DISABLE 0 #define ENABLE 1 #define CONFIG_PADMUX_MODE0 0x00 #define CONFIG_PADMUX_MODE1 0x01 #define CONFIG_PADMUX_MODE2 0x02 #define CONFIG_PADMUX_MODE3 0x03 #define CONFIG_PADMUX_MODE4 0x04 #define CONFIG_PADMUX_MODE5 0x05 #define CONFIG_PADMUX_MODE6 0x06 #define CONFIG_PADMUX_MODE7 0x07 #define CONFIG_PADMUX_MODE8 0x08 #define CONFIG_PADMUX_MODE9 0x09 #define CONFIG_PADMUX_UNKNOWN 0xFF

例如UART3,UART4 配置成了CONFIG_PADMUX_MODE1,其实也是ENABLE。
接着在 vendormstarmbootMBootsbootsrc{$Board}drvPadConf.c 文件中设置寄存器值:
#ifdef PADS_UART3_MODE #if (PADS_UART3_MODE != CONFIG_PADMUX_UNKNOWN) #define _CONFIG_UART3_MODE ((PADS_UART3_MODE == CONFIG_PADMUX_MODE1) ? BIT2 : (PADS_UART3_MODE == CONFIG_PADMUX_MODE2) ? BIT3 : (PADS_UART3_MODE == CONFIG_PADMUX_MODE3) ? (BIT3 | BIT2) : 0) _RVM1(0x1e05, _CONFIG_UART3_MODE, (BIT3 | BIT2)), #endif #endif #ifdef PADS_UART4_MODE #if (PADS_UART4_MODE != CONFIG_PADMUX_UNKNOWN) #define _CONFIG_UART4_MODE ((PADS_UART4_MODE == CONFIG_PADMUX_MODE1) ? BIT6 : (PADS_UART4_MODE == CONFIG_PADMUX_MODE2) ? BIT7 : (PADS_UART4_MODE == CONFIG_PADMUX_MODE3) ? (BIT7 | BIT6) : 0) _RVM1(0x1e04, _CONFIG_UART4_MODE, (BIT7 | BIT6)), #endif #endif
针对UART3,UART4 设置了寄存器0x1e05 的bit2,0x1e04的bit6 。这样就配置完成了。
(2)I2C 总线功能配置
以I2C2 为例
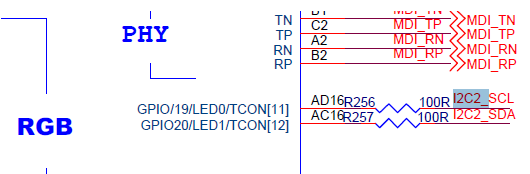
I2C 的clk,data 脚分别连接在AD16,AC16 两个pin 上面。比较特殊的是这两个pin 都是有复用功能的。所以需要disable掉其特殊功能LED/tcon。
在BD_MST160D_AH_M7221.h中可以关闭LED功能:
#define PADS_LED_MODE DISABLE
Tcon[11],Tcon[12], 未找到,属于备用的暂不处理
寄存器设置
#ifdef PADS_LED_MODE #if (PADS_LED_MODE != CONFIG_PADMUX_UNKNOWN) #define _CONFIG_LED_MODE ((PADS_LED_MODE == ENABLE) ? BIT4 : 0) _RVM1(0x1eb4, _CONFIG_LED_MODE, BIT4), #if (PADS_LED_MODE == DISABLE) _MEMMAP_PM_, //reg_seperate_wol_led_is_gpio _RVM1(0x0e39, BIT7, BIT7), //reg_led_is_gpio _RVM1(0x0e39, 0, BIT0), _MEMMAP_nonPM_, #endif #endif #endif
disable 掉特殊功能之后,开始配置I2C 功能
//SWI2C #define PAD_DDCR_CK_IS_GPIO GPIO_IN //I2C-SCL (EEPROM) #define PAD_DDCR_DA_IS_GPIO GPIO_IN //I2CM-SDA (EEPROM) #define PAD_TGPIO0_IS_GPIO GPIO_IN //TUNER_SCL #define PAD_TGPIO1_IS_GPIO GPIO_IN //TUNER_SDA #define PAD_GPIO19_IS_GPIO GPIO_IN //I2C2-SCL #define PAD_GPIO20_IS_GPIO GPIO_IN //I2C2-SDA*
将GPIO19,GPIO20 配置成了GPIO_IN,接着进行寄存器配置。如下:
#if(PAD_GPIO19_IS_GPIO != GPIO_NONE) #define PAD_GPIO19_OEN (PAD_GPIO19_IS_GPIO == GPIO_IN ? BIT1: 0) #define PAD_GPIO19_OUT (PAD_GPIO19_IS_GPIO == GPIO_OUT_HIGH ? BIT0: 0) _RVM1(0x2b08, PAD_GPIO19_OUT, BIT0), _RVM1(0x2b08, PAD_GPIO19_OEN, BIT1), //reg_tconconfig11 _RVM1(0x1ea1, 0, BIT3), //reg[101ea1]#3 = 0b //reg_agc_dbg _RVM1(0x1e9e, 0, BIT7), //reg[101e9e]#7 = 0b //reg_led_mode _RVM1(0x1eb4, 0, BIT4), //reg[101eb4]#4 = 0b //reg_seconduartmode _RVM1(0x1e05, 0, BIT1 | BIT0), //reg[101e05]#1 ~ #0 = 00b //reg_od2nduart _RVM1(0x1ea9, 0, BIT1 | BIT0), //reg[101ea9]#1 ~ #0 = 00b //reg_miic_mode0 _RVM1(0x1edc, 0, BIT0), //reg[101edc]#0 = 0b #endif #if(PAD_GPIO20_IS_GPIO != GPIO_NONE) #define PAD_GPIO20_OEN (PAD_GPIO20_IS_GPIO == GPIO_IN ? BIT1: 0) #define PAD_GPIO20_OUT (PAD_GPIO20_IS_GPIO == GPIO_OUT_HIGH ? BIT0: 0) _RVM1(0x2b09, PAD_GPIO20_OUT, BIT0), _RVM1(0x2b09, PAD_GPIO20_OEN, BIT1), //reg_tconconfig12 _RVM1(0x1ea1, 0, BIT4), //reg[101ea1]#4 = 0b //reg_agc_dbg _RVM1(0x1e9e, 0, BIT7), //reg[101e9e]#7 = 0b //reg_led_mode _RVM1(0x1eb4, 0, BIT4), //reg[101eb4]#4 = 0b //reg_seconduartmode _RVM1(0x1e05, 0, BIT1 | BIT0), //reg[101e05]#1 ~ #0 = 00b //reg_od2nduart _RVM1(0x1ea9, 0, BIT1 | BIT0), //reg[101ea9]#1 ~ #0 = 00b //reg_vx1gpi_mode _RVM1(0x1e4a, 0, BIT1 | BIT0), //reg[101e4a]#1 ~ #0 = 00b //reg_miic_mode0 _RVM1(0x1edc, 0, BIT0), //reg[101edc]#0 = 0b //reg_extint5 _RVM1(0x1ea5, 0, BIT5), //reg[101ea5]#5 = 0b #endif
其实配置成GPIO_IN 容易和 标准GPIO IN 模式产生误解。应该区别一下定义成IIC_MODE等其他宏,然后drvpadconf.c 文件中,设置寄存器即可。
寄存器值的设置才是pin 的功能设置的本质,这样就完成mboot里面pin的功能定义。
3、使用实例 - 移植TCA9539
tca959 作为一款纯IIC控制的mcu,上电后即可通过主控IC的 I2C 来控制mcu 的管脚,设置这些pin的input / output 模式,以及获取output的高低,另外也可以获取input的状态。通常主控IC的IO口不够用时用来扩展IO口。
(1)TCA9539 I2C地址确定
查看TCA9539 的datasheet 文档,地址部分,总共有7位,其中Slave address 的bit 位固定,另外最后两个bits 位根据原理图中地址pin 的高低来判断
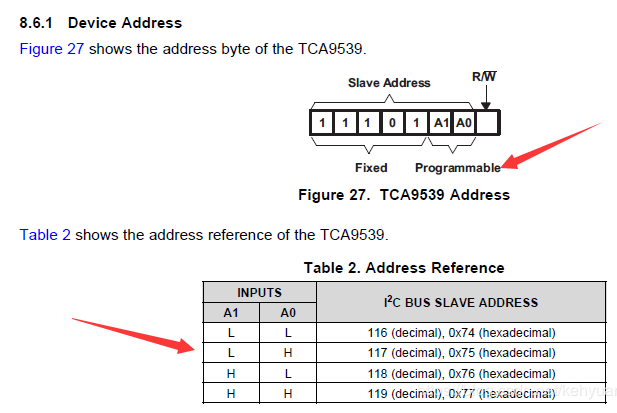
查看原理图发现,tca9539 的I2C地址脚IIC_SEL0,IIC_SEL1 接的是下拉电阻,两个PIN都是低电平,故地址应该取0x74.
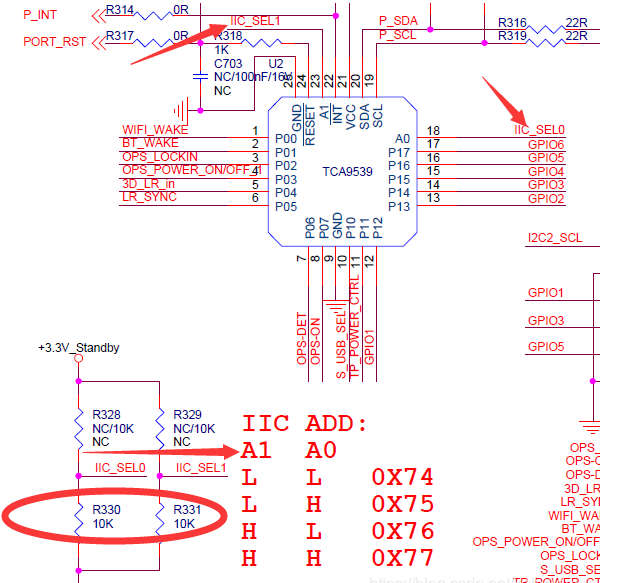
结合原理图和datasheet 得到一个7bit 的I2C地址后,需要左移(x2), 末尾补零生成一个8bit 的地址(包含读写位)给软件使用,计算后该地址为 0xE8.
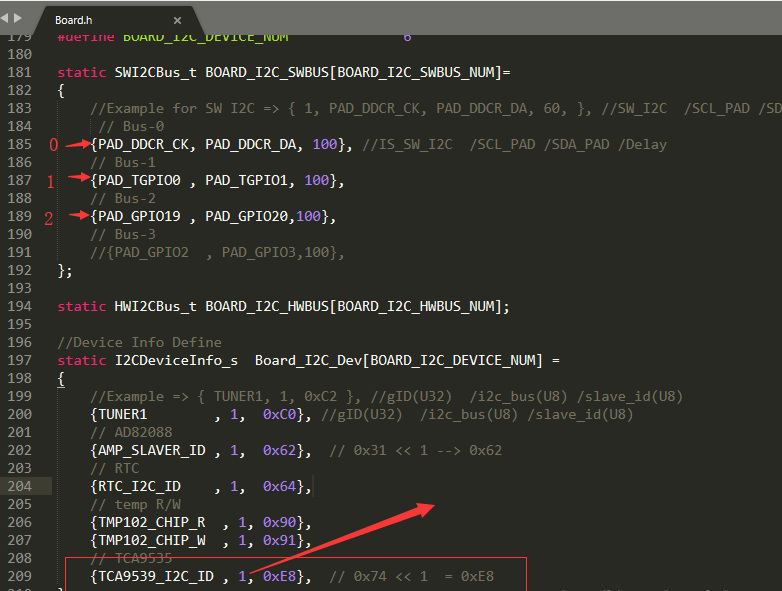
(2)TCA9539 I2C地址配置
找到对应板型的board.h 文件,配置tca9539 IIC 信息。包含在那一组IIC及设备的IIC 地址。其中TCA9539_I2C_ID 只是一个枚举值方便应用调用。
(3)管脚功能配置
功能配置主要是配置对应pin的输入,输出模式及输出模式的高低状态
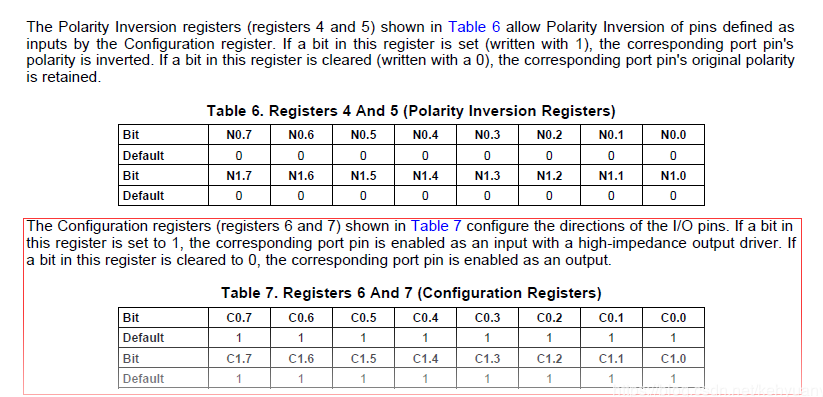
根据datasheet 的说明,寄存器0x06 , 0x07 分别配置port 0~ 7 ,port 10~17对应bit位为1 则为输入 为0 则为输出。 而寄存器0x04, 0x05 分别是设置port 0 ~ 7,port 10 ~ 17 的极性。
例如:设置P3,P4,P5,P7,P10,P11 需要设置为output,其它为input模式:
#define TCA9539_MASK_P0 (1 << 0) #define TCA9539_MASK_P1 (1 << 1) #define TCA9539_MASK_P2 (1 << 2) #define TCA9539_MASK_P3 (1 << 3) #define TCA9539_MASK_P4 (1 << 4) #define TCA9539_MASK_P5 (1 << 5) #define TCA9539_MASK_P6 (1 << 6) #define TCA9539_MASK_P7 (1 << 7) // P3,P4,P5,P7 set to output 0x47 static MAPI_U8 uTca9539_Ports_L_Mode = 0xFF & (~(TCA9539_MASK_P3)) & (~(TCA9539_MASK_P4)) & (~(TCA9539_MASK_P5)) & (~(TCA9539_MASK_P7)); // P10,P11 set to output 0xFC static MAPI_U8 uTca9539_Ports_H_Mode = (0xFF & (~(TCA9539_MASK_P0)) & (~(TCA9539_MASK_P1)));
定义寄存器0x06 需要初始化的值0x47 (0100 0111), 二进制从右到左 bit0~bit7 对应port0 ~ port7;寄存器 0x07,需要初始化的值0xFC (1111 1100) ,二进制从右到左bit0 ~ bit7 对应port10 ~ port17.
MAPI_U8 uCfgLowPorts = 0x06; MAPI_U8 uCfgHighPorts = 0x07; iptr = mapi_i2c::GetI2C_Dev(TCA9539_I2C_ID); if(iptr == NULL) { printf("[%s][%d] Invalid I2c mcu addr . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // config the port mode <input or output> if(MAPI_FALSE == iptr->WriteBytes(1,&uCfgLowPorts,1,&uTca9539_Ports_L_Mode)) { printf("[%s][%d] wirte the port 0~7 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } if(MAPI_FALSE == iptr->WriteBytes(1,&uCfgHighPorts,1,&uTca9539_Ports_H_Mode)) { printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; }
这样就完成input , output 模式的配置。
(4)读取输出管脚状态
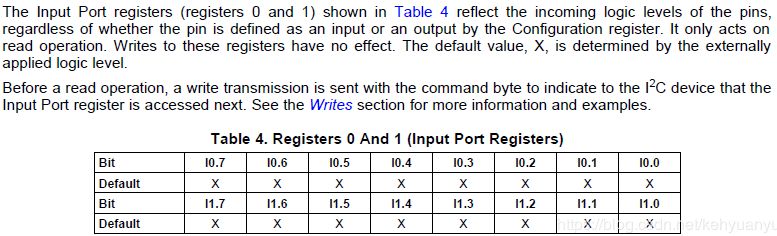
通过datasheet得到,寄存器0x00,0x01 是用来获取port 的状态:
MAPI_U8 uLowRegAddr = 0x00; MAPI_U8 uHighRegAddr = 0x01; MAPI_U8 uOldData = 0x00; MAPI_U8 uData = 0x00; MAPI_U8 uMask = 0x00; MAPI_U8 uRRegAddr = (port > TCA9539_P7) ? uHighRegAddr : uLowRegAddr; iptr = mapi_i2c::GetI2C_Dev(TCA9539_I2C_ID); if(iptr == NULL) { printf("[%s][%d] Invalid I2c mcu addr . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // 获取port 口该组的所有状态 if(MAPI_FALSE == iptr->ReadBytes(1, &uRRegAddr, 1, &uOldData)) { printf("[%s][%d] get the port status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // 计算返回对应port 口的状态 return (uData >> (port % 10) | 0x01);
(5)设置输出管脚状态

通过datasheet可知,输出管脚的状态,通过寄存器0x2,0x03 来设置:
MAPI_BOOL device_mcu_tca9539::Set_port_Output(MAPI_U8 port, MAPI_BOOL bOutState) { mapi_i2c *iptr = NULL; // for output status MAPI_U8 uLowRegAddr = 0x00; MAPI_U8 uHighRegAddr = 0x01; MAPI_U8 uLowWReg = 0x02; MAPI_U8 uHighWReg = 0x03; MAPI_U8 uOldData = 0x00; MAPI_U8 uData = 0x00; MAPI_U8 uMask = 0x00; MAPI_U8 uRRegAddr = (port > TCA9539_P7) ? uHighRegAddr : uLowRegAddr; MAPI_U8 uWRegAddr = (port > TCA9539_P7) ? uHighWReg : uLowWReg; iptr = mapi_i2c::GetI2C_Dev(TCA9539_I2C_ID); if(iptr == NULL) { printf("[%s][%d] Invalid I2c mcu addr . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // 通过寄存器0x00(port0 ~ port7)/0x01(port10 ~ port17)读取当前port口的状态 if(MAPI_FALSE == iptr->ReadBytes(1, &uRRegAddr, 1, &uOldData)) { printf("[%s][%d] get the port status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // 计算,并设置port 的新状态,其它port 状态不变 uMask = 1 << (port % 10); // set the new status if(bOutState){ uData = (uMask | uOldData); // set H } else { uData = (~uMask) & uOldData; // set L } // 对寄存器0x02(port0 ~ port7)/0x03(port10 ~ port17)写输出的高低状态 if(MAPI_FALSE == iptr->WriteBytes(1, &uWRegAddr, 1, &uData)) { printf("[%s][%d] set the new status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } printf("[%s][%d] set the P%02d to %d. ",__FUNCTION__,__LINE__,port,bOutState); return MAPI_TRUE; }
完整驱动代码 :
device_mcu_tca9539.h:
#ifndef __DEVIDE_MCU_TCA9539_H__ #define __DEVIDE_MCU_TCA9539_H__ /*@ <Include> @*/ #include "mapi_mcu.h" #include "MsTypes.h" #include "MTypes.h" /*@ </Include> @*/ #define PORT_INPUT (1) #define PORT_OUTPUT (0) #define OUTPUT_H (1) #define OUTPUT_L (0) #define TCA9539_P0 (0) #define TCA9539_P1 (1) #define TCA9539_P2 (2) #define TCA9539_P3 (3) #define TCA9539_P4 (4) #define TCA9539_P5 (5) #define TCA9539_P6 (6) #define TCA9539_P7 (7) #define TCA9539_P10 (10) #define TCA9539_P11 (11) #define TCA9539_P12 (12) #define TCA9539_P13 (13) #define TCA9539_P14 (14) #define TCA9539_P15 (16) #define TCA9539_P16 (15) #define TCA9539_P17 (17) #define TCA9539_MASK_P0 (1 << 0) #define TCA9539_MASK_P1 (1 << 1) #define TCA9539_MASK_P2 (1 << 2) #define TCA9539_MASK_P3 (1 << 3) #define TCA9539_MASK_P4 (1 << 4) #define TCA9539_MASK_P5 (1 << 5) #define TCA9539_MASK_P6 (1 << 6) #define TCA9539_MASK_P7 (1 << 7) class device_mcu_tca9539 : public mapi_mcu { public: DLL_PUBLIC device_mcu_tca9539(void); DLL_PUBLIC ~device_mcu_tca9539(void); DLL_PUBLIC MAPI_BOOL Init(void); DLL_PUBLIC MAPI_BOOL Finalize(void); DLL_PUBLIC MAPI_BOOL Reset(void); DLL_PUBLIC MAPI_BOOL Set_port_mode(MAPI_U8 port, MAPI_BOOL bInput); DLL_PUBLIC MAPI_BOOL Get_port_mode(MAPI_U8 port, MAPI_U8 *uMode); DLL_PUBLIC MAPI_BOOL Set_port_Output(MAPI_U8 port, MAPI_BOOL bOutState); DLL_PUBLIC MAPI_BOOL Get_port_State(MAPI_U8 port, MAPI_BOOL *bMode, MAPI_BOOL *bState); DLL_PUBLIC MAPI_BOOL Tca9539Setup(void); }; #endif // __DEVIDE_LED_DEFAULT_H__
device_mcu_tca9539.cpp:
#include <sys/stat.h> #include <unistd.h> #include <cstring> #include "MsCommon.h" #include "MsOS.h" #include <dirent.h> // #include "mapi_gpio.h" #include "mapi_i2c.h" #include "mapi_i2c_devTable.h" #include "mapi_gpio_devTable.h" #include "device_mcu_tca9539.h" #include "MSrv_Control_common.h" // P3,P4,P5,P7 set to output 0x47 static MAPI_U8 uTca9539_Ports_L_Mode = 0xFF & (~(TCA9539_MASK_P3)) & (~(TCA9539_MASK_P4)) & (~(TCA9539_MASK_P5)) & (~(TCA9539_MASK_P7)); // P10,P11 set to output 0xFC static MAPI_U8 uTca9539_Ports_H_Mode = (0xFF & (~(TCA9539_MASK_P0)) & (~(TCA9539_MASK_P1))); device_mcu_tca9539::device_mcu_tca9539(void) { } device_mcu_tca9539::~device_mcu_tca9539(void) { } MAPI_BOOL device_mcu_tca9539::Init(void) { return Reset(); } MAPI_BOOL device_mcu_tca9539::Finalize(void) { BOOL bRet = FALSE; printf("Finalize TCA9539 "); bRet = MSrv_Control_common::SetGpioDeviceStatus(MCU_RESET,FALSE); return (bRet) ? MAPI_TRUE : MAPI_FALSE; } MAPI_BOOL device_mcu_tca9539::Reset(void) { BOOL bRet1 = FALSE; BOOL bRet2 = FALSE; printf("Reset TCA9539 "); bRet1 = MSrv_Control_common::SetGpioDeviceStatus(MCU_RESET,FALSE); usleep(100*1000); // 100ms bRet2 = MSrv_Control_common::SetGpioDeviceStatus(MCU_RESET,TRUE); Tca9539Setup(); return (bRet1 && bRet2) ? MAPI_TRUE : MAPI_FALSE; } MAPI_BOOL device_mcu_tca9539::doHandleOps(void) { MAPI_BOOL bMode = FALSE; MAPI_BOOL bPlugState = TRUE; // plug out: ops H ; plug in : ops L MAPI_BOOL bState = TRUE; // ops status. H: off; L: on // OPS Det Get_port_State(TCA9539_P6, &bMode, &bPlugState); // OPS power Get_port_State(TCA9539_P17, &bMode, &bState); if((!bPlugState)&&(bState)){ // // set ops on // uData = 0x7F; // P3 = H ,P7 = L // if(MAPI_FALSE == iptr->WriteBytes(1,&uLowRegAddr,1,&uData)) // { // printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); // return MAPI_FALSE; // } // usleep(100*1000); // uData = 0xFF; // P3 = H ,P7 = H // if(MAPI_FALSE == iptr->WriteBytes(1,&uLowRegAddr,1,&uData)) // { // printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); // return MAPI_FALSE; // } Set_port_Output(TCA9539_P7,MAPI_FALSE); // to L usleep(100*1000); Set_port_Output(TCA9539_P7,MAPI_TRUE); // to H printf("[%s][%d] start the ops . ",__FUNCTION__,__LINE__); return TRUE; } return FALSE; } MAPI_BOOL device_mcu_tca9539::Tca9539Setup(void) { mapi_i2c *iptr = NULL; MAPI_U8 uCfgLowPorts = 0x06; MAPI_U8 uCfgHighPorts = 0x07; // for output status MAPI_U8 uLowRegAddr = 0x02; MAPI_U8 uHighRegAddr = 0x03; MAPI_U8 uData = 0x00; printf("[%s][%d] Enter . ",__FUNCTION__,__LINE__); iptr = mapi_i2c::GetI2C_Dev(TCA9539_I2C_ID); if(iptr == NULL) { printf("[%s][%d] Invalid I2c mcu addr . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // config the port mode <input or output> if(MAPI_FALSE == iptr->WriteBytes(1,&uCfgLowPorts,1,&uTca9539_Ports_L_Mode)) { printf("[%s][%d] wirte the port 0~7 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } if(MAPI_FALSE == iptr->WriteBytes(1,&uCfgHighPorts,1,&uTca9539_Ports_H_Mode)) { printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // config: set port(output) status uData = 0xF7; // P3 = L , other bit was seted to H if(MAPI_FALSE == iptr->WriteBytes(1,&uLowRegAddr,1,&uData)) { printf("[%s][%d] wirte the port 0~7 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // set touch power uData = 0xFC; // P10, P11 = L , other bit was seted to H if(MAPI_FALSE == iptr->WriteBytes(1,&uHighRegAddr,1,&uData)) { printf("[%s][%d] wirte the port 0~7 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } doHandleOps(); #if 0 // set ops on uData = 0x7F; // P3 = H ,P7 = L if(MAPI_FALSE == iptr->WriteBytes(1,&uLowRegAddr,1,&uData)) { printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } usleep(100*1000); uData = 0xFF; // P3 = H ,P7 = H if(MAPI_FALSE == iptr->WriteBytes(1,&uLowRegAddr,1,&uData)) { printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } #endif #if 0 // config the S_USB_SEL // uData = 0xFE; // P10 = L android source uData = 0xFF; // P10 = H OPS source if(MAPI_FALSE == iptr->WriteBytes(1,&uHighRegAddr,1,&uData)) { printf("[%s][%d] wirte the port 10~17 failed. ",__FUNCTION__,__LINE__); return MAPI_FALSE; } #endif printf("[%s][%d] setup success. ",__FUNCTION__,__LINE__); return MAPI_TRUE; } // bInput: TRUE --> input , FALSE --> output MAPI_BOOL device_mcu_tca9539::Set_port_mode(MAPI_U8 port, MAPI_BOOL bInput) { printf("[%s][%d] Enter . ",__FUNCTION__,__LINE__); return MAPI_TRUE; } // uMode: 1 --> input, 0 --> output MAPI_BOOL device_mcu_tca9539::Get_port_mode(MAPI_U8 port, MAPI_U8 *uMode) { printf("[%s][%d] Enter . ",__FUNCTION__,__LINE__); return MAPI_TRUE; } MAPI_BOOL device_mcu_tca9539::Set_port_Output(MAPI_U8 port, MAPI_BOOL bOutState) { mapi_i2c *iptr = NULL; // for output status MAPI_U8 uLowRegAddr = 0x00; MAPI_U8 uHighRegAddr = 0x01; MAPI_U8 uLowWReg = 0x02; MAPI_U8 uHighWReg = 0x03; MAPI_U8 uOldData = 0x00; MAPI_U8 uData = 0x00; MAPI_U8 uMask = 0x00; MAPI_U8 uRRegAddr = (port > TCA9539_P7) ? uHighRegAddr : uLowRegAddr; MAPI_U8 uWRegAddr = (port > TCA9539_P7) ? uHighWReg : uLowWReg; iptr = mapi_i2c::GetI2C_Dev(TCA9539_I2C_ID); if(iptr == NULL) { printf("[%s][%d] Invalid I2c mcu addr . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // get the old status if(MAPI_FALSE == iptr->ReadBytes(1, &uRRegAddr, 1, &uOldData)) { printf("[%s][%d] get the port status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } uMask = 1 << (port % 10); // set the new status if(bOutState){ uData = (uMask | uOldData); // set H } else { uData = (~uMask) & uOldData; // set L } if(MAPI_FALSE == iptr->WriteBytes(1, &uWRegAddr, 1, &uData)) { printf("[%s][%d] set the new status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } printf("[%s][%d] set the P%02d to %d. ",__FUNCTION__,__LINE__,port,bOutState); return MAPI_TRUE; } MAPI_BOOL device_mcu_tca9539::Get_port_State(MAPI_U8 port, MAPI_BOOL *bMode, MAPI_BOOL *bState) { mapi_i2c *iptr = NULL; // used for port status MAPI_U8 uInLowRegAddr = 0x00; MAPI_U8 uInHighRegAddr = 0x01; MAPI_U8 uRegAddr = (port > TCA9539_P7) ? uInHighRegAddr : uInLowRegAddr; // for port mode MAPI_U8 uLowPorts = 0x06; MAPI_U8 uHighPorts = 0x07; MAPI_U8 uModeRegAddr = (port > TCA9539_P7) ? uHighPorts : uLowPorts; MAPI_U8 uData = 0x00; MAPI_U8 uMode = 0x00; if(NULL == bMode || NULL == bState || (port > TCA9539_P17 || port < TCA9539_P0)) { printf("[%s][%d] param error . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } iptr = mapi_i2c::GetI2C_Dev(TCA9539_I2C_ID); if(iptr == NULL) { printf("[%s][%d] Invalid I2c mcu addr . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } // get the port mode <input/outputO> if(MAPI_FALSE == iptr->ReadBytes(1, &uModeRegAddr, 1, &uData)) { printf("[%s][%d] get the old status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } uMode = (uData >> (port % 10)) & 0x01; *bMode = uMode; uData = 0x00; if(MAPI_FALSE == iptr->ReadBytes(1, &uRegAddr, 1, &uData)) { printf("[%s][%d] get the port status failed . ",__FUNCTION__,__LINE__); return MAPI_FALSE; } printf("[%s][%d] uRegAddr [0x%02x] , uData [0x%02x] ", __FUNCTION__,__LINE__, uRegAddr, uData); *bState = (uData >> (port % 10) & 0x01); printf("[%s][%d] P%02d mode <%s> , state [%d] ", __FUNCTION__,__LINE__, port, (bMode ? "Input":"Output"), *bState); return MAPI_TRUE; }