代码仓库: https://github.com/brandonlyg/cute-dl
(转载请注明出处!)
目标
上个阶段使用MLP模型在在MNIST数据集上实现了92%左右的准确率,达到了tensorflow同等模型的水平。这个阶段要让cute-dl框架支持最简单的卷积神经网络, 并在MNIST和CIFA10数据上验证,具体来说要达到如下目标:
- 添加2D卷积层。
- 添加2D最大池化层。
- CNN模型在MNIST数据集上达到99%以上的准确率。
- CNN模型在CIFA10数据集上达到70%以上在准确率。
卷积层的设计和实现
卷积运算
卷积运算有两个关键要素: 卷积核(过滤器), 卷积运算步长。如果卷积运算的目标是二维的那么卷积核可以用矩阵表示,卷积运算步长可以用二维向量。例如用kernel_size=(3,3)表示卷积核的尺寸,strides=(1,1)表示卷积运算的步长, 假如卷积核是这样的:
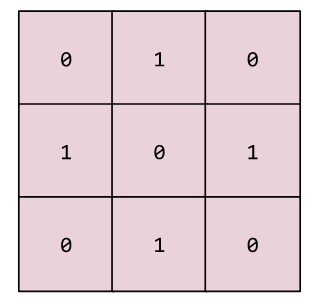
可以把它看成(R^{3 X 3})矩阵。在步长strides=(1,1)的情况下卷积运算如下所示:
其中
(注意示意图中最后次运算计算有误应该是660)
这个卷积运算输入的是一个高h=5, 宽w=5的特征图, 卷积运算输出的是一个高h_=3, 宽w_=3的特征图。 如果已知w, h, kernel_size=((h_k, w_k)), strides=((h_s, w_s)), 那么输出特征图的高和宽分别为:
由上面两个等式可以得出: h_ <= h, w_ <= w。经过卷积运算后特征图会变小。
卷积层设计
卷积层的设计主要考虑以下几个问题:
- 输入层的图像数据可能有多个(颜色)通道, 卷积层要能够处理多通道的输入。
- 当叠加多个卷积层时,一般情况下特征图会逐层变小, 可以叠加的层数很少, 从而限制了模型的表达能力。卷积层要能够通过填充改变输入特征图的大小, 控制输出特征图的大小。
- 如果用循环实现卷积运算, 会导致性能很低, 要把卷积运算转换成矩阵运算。
- 卷积层输出的特征图最后会输入到全连接层中, 而全连接层值只支持矩阵输入,因此需要一个过渡层把特征图展平成矩阵。
初始化参数
卷积层输入是特征图,它的形状为(m,c,h,w), 其中m是批次大小,c是通道数,h,w分别为特征图的高、宽。输出也是特征图,形状为(m,c_,h_,w_)。前面已经给出了h_和h, w_和w的关系,已知h,w情况下确定h_,w_还需要给出(h_k,w_k, h_s, w_s), c_是独立的量,可以根据需要设置。因此卷积层初始化时需要给出的层参数有:卷积核大小kernel_size=((h_k, w_k)), 卷积运算步长strides=((h_s, w_s)), 输出通道数c_。 另外还需要padding参数指定填充方式来控制输出特征图的大小。
填充
一般情况下, 特征图经过卷积层时会缩小,当h=h_时, 则有:
其中 0 <(h_s) < h, 只有当(h_s)=1时这个等式才有意义, (h_k=1)。同理可以得到当w=w_时, (w_k=w_s=1)。因此在没有填充的情况下如果要得到大小不变的输出,必须把卷积核设置成kernel_size=(1,1), 步长设置成strides=(1,1), 这限制了卷积层的表达能力。
为了能够比较自由地设置kernel_size和strides, 我们把特征图输入输出大小关系略作调整:
其中(h_p, w_p)分别是在高度和宽度上的填充。在高度上,需要在顶部和底部分别填充(h_p)的高度。在宽度上也是一样。
以高度方向的填充为例:
如果(h_s=1), (h_k)选择[1, h]之内的任意一个奇数都等让上式有意义。当(h_s > 1)时, (h_k)会有更多的选择。然而在工程上,太多的选择并不一定是好事。太多的选择可能意味着有很多方法可以处理目标问题,也有肯能意味着很难找到有效的方法。
前面讨论了通过填充实现h_=h, w_=w的情况。 填充也可以实现h_>h, w_>h, 这种情况没有多大意义,这里不予考虑。因此padding只支持两种不同的参数: 'valid'不填充; 'same'填充,使输入输出特征图同样大。
把卷积运算转换成矩阵运算
一个输入输出别为((m, c, h, w)), ((m, c\_, h\_, w\_))的卷积层, 可以把权重参数W的形状设计成((c*h_k*w_k, c\_)), 输入特征图转换成卷积矩阵F, 形状为((m*w\_*h\_, c*h_k*w_k)), W, F进行矩阵运算,转换成输出特征图的步骤如下:
- W, F进行矩阵运算得到形状为((m*w\_*h\_, c\_))矩阵。
- 转换形状((m*w\_*h\_, c\_))->((m, h\_, w\_, c\_))。
- 移动通道维度((m, h\_, w\_, c\_))->((m, c\_, h\_, w\_,))。
卷积层实现
卷积层代码位于cutedl/cnn_layers.py中, 类名为Conv2D, 它支持2维特征图。
初始化
'''
channels 输出通道数 int
kernel_size 卷积核形状 (kh, kw)
strids 卷积运算步长(sh, sw)
padding 填充方式 'valid': 步填充. 'same': 使输出特征图和输入特征图形状相同
inshape 输入形状 (c, h, w)
c 输入通道数
h 特征图高度
w 特征图宽度
kernel_initialier 卷积核初始化器
uniform 均匀分布
normal 正态分布
bias_initialier 偏移量初始化器
uniform 均匀分布
normal 正态分布
zeros 0
'''
def __init__(self, channels, kernel_size, strides=(1,1),
padding='same',
inshape=None,
activation='relu',
kernel_initializer='uniform',
bias_initializer='zeros'):
#pdb.set_trace()
self.__ks = kernel_size
self.__st = strides
self.__pad = (0, 0)
self.__padding = padding
#参数
self.__W = self.weight_initializers[kernel_initializer]
self.__b = self.bias_initializers[bias_initializer]
#输入输出形状
self.__inshape = (-1, -1, -1)
self.__outshape = None
#输出形状
outshape = self.check_shape(channels)
if outshape is None or type(channels) != type(1):
raise Exception("invalid channels: "+str(channels))
self.__outshape = outshape
#输入形状
inshape = self.check_shape(inshape)
if self.valid_shape(inshape):
self.__inshape = self.check_shape(inshape)
if self.__inshape is None or len(self.__inshape) != 3:
raise Exception("invalid inshape: "+str(inshape))
outshape, self.__pad = compute_2D_outshape(self.__inshape, self.__ks, self.__st, self.__padding)
self.__outshape = self.__outshape + outshape
super().__init__(activation)
self.__in_batch_shape = None
self.__in_batch = None
如当前层是输入层, 需要inshape参数,在初始类初始化时会调用compute_2D_outshape方法计算输出形状,如果当前层不是输入层,会在set_prev方法中计算输出形状。下面是compute_2D_outshape函数的实现:
'''
计算2D卷积层的输输出和填充
'''
def compute_2D_outshape(inshape, kernel_size, strides, padding):
#pdb.set_trace()
_, h, w = inshape
kh, kw = kernel_size
sh, sw = strides
h_ = -1
w_ = -1
pad = (0, 0)
if 'same' == padding:
#填充, 使用输入输出形状一致
_, h_, w_ = inshape
pad = (((h_-1)*sh - h + kh )//2, ((w_-1)*sw - w + kw)//2)
elif 'valid' == padding:
#不填充
h_ = (h - kh)//sh + 1
w_ = (w - kw)//sw + 1
else:
raise Exception("invalid padding: "+padding)
#pdb.set_trace()
outshape = (h_, w_)
return outshape, pad
这个函数除了返回输出形状还返回填充值,这是因为,特征图和矩阵之间进行转换时需要知道填充的大小。
卷积运算
卷积运算会在向前传播是执行,代码如下:
'''
向前传播
in_batch: 一批输入数据
training: 是否正在训练
'''
def forward(self, in_batch, training=False):
#pdb.set_trace()
W = self.__W.value
b = self.__b.value
self.__in_batch_shape = in_batch.shape
#把输入特征图展开成卷积运算的矩阵矩阵(m*h_*w_, c*kh*kw)
in_batch = img2D_mat(in_batch, self.__ks, self.__pad, self.__st)
#计算输出值(m*h_*w_, c_) = (m*h_*w_, c*kh*kw) @ (c*kh*kw, c_) + (c_,)
out = in_batch @ W + b
#把(m*h_*w_, c_) 转换成(m, h_, w_, c_)
c_, h_, w_ = self.__outshape
out = out.reshape((-1, h_, w_, c_))
#把输出值还原成(m, c_, h_, w_)
out = np.moveaxis(out, -1, 1)
self.__in_batch = in_batch
return self.activation(out)
其中img2D_mat函数把输入特征图转换成用于卷积运算的矩阵,这个函数的实现如下:
'''
把2D特征图转换成方便卷积运算的矩阵, 形状(m*h_*w_, c*kh*kw)
img 特征图 shape=(m,c,h,w)
kernel_size 核形状 shape=(kh, kw)
pad 填充大小 shape=(ph, pw)
strides 步长 shape=(sh, sw)
'''
def img2D_mat(img, kernel_size, pad, strides):
#pdb.set_trace()
kh, kw = kernel_size
ph, pw = pad
sh, sw = strides
#pdb.set_trace()
m, c, h, w = img.shape
kh, kw = kernel_size
#得到填充的图
pdshape = (m, c) + (h + 2*ph, w + 2*pw)
#得到输出大小
h_ = (pdshape[2] - kh)//sh + 1
w_ = (pdshape[3] - kw)//sw + 1
#填充
padded = np.zeros(pdshape)
padded[:, :, ph:(ph+h), pw:(pw+w)] = img
#转换成卷积矩阵(m, h_, w_, c, kh, kw)
#pdb.set_trace()
out = np.zeros((m, h_, w_, c, kh, kw))
for i in range(h_):
for j in range(w_):
#(m, c, kh, kw)
cov = padded[:, :, i*sh:i*sh+kh, j*sw:j*sw+kw]
out[:, i, j] = cov
#转换成(m*h_*w_, c*kh*kw)
out = out.reshape((-1, c*kh*kw))
return out
反向传播
方向方向传播没什么特别的地方,主要把梯度矩阵还原到特征图上, 代码如下。
'''
矩阵形状的梯度转换成2D特征图梯度
mat 矩阵梯度 shape=(m*h_*w_, c*kh*kw)
特征图形状 imgshape=(m, c, h, w)
'''
def matgrad_img2D(mat, imgshape, kernel_size, pad, strides):
#pdb.set_trace()
m, c, h, w = imgshape
kh, kw = kernel_size
sh, sw = strides
ph, pw = pad
#得到填充形状
pdshape = (m, c) + (h + 2*ph, w + 2 * pw)
#得到输出大小
h_ = (pdshape[2] - kh)//sh + 1
w_ = (pdshape[3] - kw)//sw + 1
#转换(m*h_*w_, c*kh*kw)->(m, h_, w_, c, kh, kw)
mat = mat.reshape(m, h_, w_, c, kh, kw)
#还原成填充后的特征图
padded = np.zeros(pdshape)
for i in range(h_):
for j in range(w_):
#(m, c, kh, kw)
padded[:, :, i*sh:i*sh+kh, j*sw:j*sw+kw] += mat[:, i, j]
#pdb.set_trace()
#得到原图(m,c,h,w)
out = padded[:, :, ph:ph+h, pw:pw+w]
return out
最大池化层的设计和实现
最大池化运算
最大池化计算和卷积运算算的过程几乎一样,只有一点不同,卷积运算是把一个卷积核矩形区域的元素、权重参数按元素相乘后取和,池化层没有权重参数,它的运算结果是取池矩形区域内的最大元素值。下面是池化运算涉及到的概念:
- pool_size: 池大小, 形如((h_p, w_p)), 其中(h_p, w_p)是池的高度和宽度。pool_size含义和卷积层的kernel_size类似.
- strides: 步长。和卷积层一样。
- padding: 填充方式,和卷积层一样。
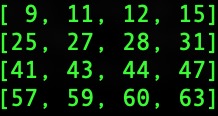
假设最大池化层的参数为: pool_size=(2,2), strides=(1,1), padding='valid'.
输入数据为:
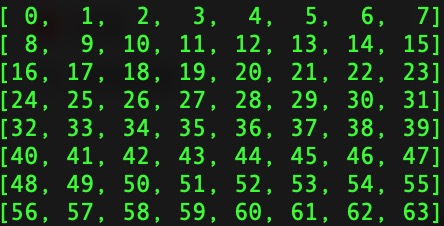
池化运算之后的输入为:
最大池化层实现
最大池化层的代码在cutedl/cnn_layers.py中,类名: MaxPool2D.
相比于Conv2D, MaxPool2D要简单许多,其代码主要集中在forward和backward方法中。
forward实现:
def forward(self, in_batch, training=False):
m, c, h, w = in_batch.shape
_, h_, w_ = self.outshape
kh, kw = self.__ks
#把特征图转换成矩阵(m, c, h, w)->(m*h_*w_, c*kh*kw)
in_batch = img2D_mat(in_batch, self.__ks, self.__pad, self.__st)
#转换形状(m*w_*h_, c*kh*kw)->(m*h_*w_*c,kh*kw)
in_batch = in_batch.reshape((m*h_*w_*c, kh*kw))
#得到最大最索引
idx = in_batch.argmax(axis=1).reshape(-1, 1)
#转成in_batch相同的形状
idx = idx @ np.ones((1, in_batch.shape[1]))
temp = np.ones((in_batch.shape[0], 1)) @ np.arange(in_batch.shape[1]).reshape(1, -1)
#得到boolean的标记
self.__mark = idx == temp
#得到最大值
max = in_batch[self.__mark]
max = max.reshape((m, h_, w_, c))
max = np.moveaxis(max, -1, 1)
return max
这个方法的关键是得到最大值索引__mark, 有了它,在反向传播的时候就能知道梯度值和输入元素的对应关系。
验证
卷积层验证代码位于examples/cnn目录下,mnis_recognize.py是手写数字识别模型,cifar10_fit.py是图片分类模型,下面是两个模型的训练报告。
cifar10数据集下载链接: https://pan.baidu.com/s/1FIBWvJ446ta7CI5_RHdeOw 密码: mhni
mnist数据集上的分类模型
模型定义:
model = Model([
cnn.Conv2D(32, (5,5), inshape=inshape),
cnn.MaxPool2D((2,2), strides=(2,2)),
cnn.Conv2D(64, (5,5)),
cnn.MaxPool2D((2,2), strides=(2,2)),
nn.Flatten(),
nn.Dense(1024),
nn.Dropout(0.5),
nn.Dense(10)
])
训练报告:

经过2.6小时的训练,模型有了99.2%的准确率,达到预期目标。
cifar10数据集上的分类模型
模型定义:
model = Model([
cnn.Conv2D(32, (3,3), inshape=inshape),
cnn.MaxPool2D((2,2), strides=(2,2)),
cnn.Conv2D(64, (3,3)),
cnn.MaxPool2D((2,2), strides=(2,2)),
cnn.Conv2D(64, (3, 3)),
nn.Flatten(),
nn.Dense(64),
nn.Dropout(0.5),
nn.Dense(10)
])
训练报告:
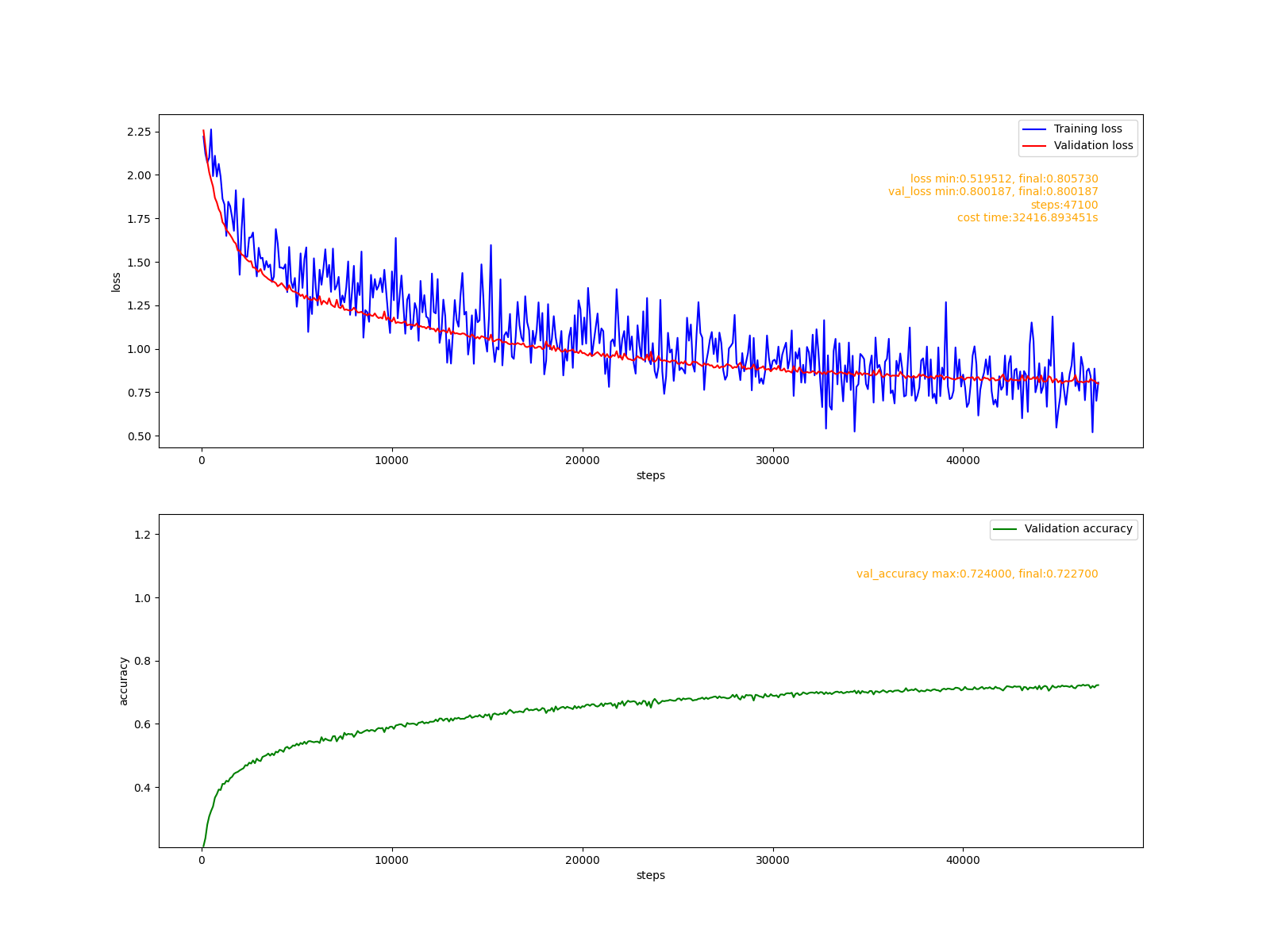
经过9小时的训练,模型有了72.2%的准确率,达到预期目标。