1. 安装 jtop
先安装依赖:
sudo apt-get install git cmake
sudo apt-get install python3-dev
sudo apt-get install libhdf5-serial-dev hdf5-tools
sudo apt-get install libatlas-base-dev gfortran
然后通过pip安装:
pip3 install --upgrade pip
pip3 install jetson-stats
运行 jtop 启动即可。
2. 配置CUDA
jetson nano 2GB 默认已经安装了 CUDA10.2 ,但是直接运行 nvcc -V 是不会成功的,需要你把CUDA的路径写入环境变量中。
export CUBA_HOME=/usr/local/cuda
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda/bin:$PATH
3. 安装pytorch
pytorch:
wget https://nvidia.box.com/shared/static/wa34qwrwtk9njtyarwt5nvo6imenfy26.whl -O torch-1.7.0-cp36-cp36m-linux_aarch64.whl
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
pip3 install numpy torch-1.7.0-cp36-cp36m-linux_aarch64.whl
torchvision:
$ sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
$ git clone --branch <version> https://github.com/pytorch/vision torchvision # see below for version of torchvision to download
$ cd torchvision
$ export BUILD_VERSION=0.x.0 # where 0.x.0 is the torchvision version
$ sudo python3 setup.py install # use python if installing for Python 2.7
$ cd ../ # attempting to load torchvision from build dir will result in import error
$ pip install 'pillow<7' # always needed for Python 2.7, not needed torchvision v0.5.0+ with Python 3.6
例如: git clone --branch v0.8.1 git@gitee.com:brt2/torchvision.git
pytorch 与 torchvision 之间的对应关系:
PyTorch v1.0 - torchvision v0.2.2
PyTorch v1.1 - torchvision v0.3.0
PyTorch v1.2 - torchvision v0.4.0
PyTorch v1.3 - torchvision v0.4.2
PyTorch v1.4 - torchvision v0.5.0
PyTorch v1.5 - torchvision v0.6.0
PyTorch v1.6 - torchvision v0.7.0
PyTorch v1.7 - torchvision v0.8.1
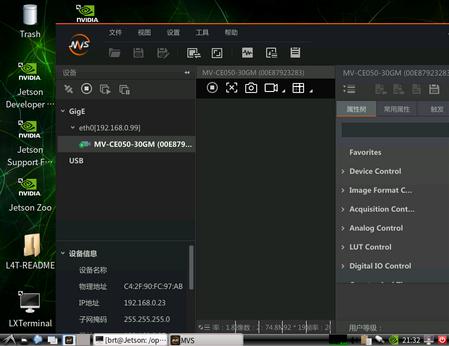
4. 安装海康相机
下载>进入海康威视工业摄像头官网,找到Linux系统ARM架构的安装包下载。

但这个是针对ubuntu16.04的版本。运行时报错:

执行 ldd ./MVS 发现少
libicui18n.so.55
libicuuc.so.55
两个动态库。通过 sudo find / -iname "libicu*" 查找发现系统的 libicui18n.so libicuuc.so 是60版本,这和需要的55版本都“隔代”了。
请在这里下载 包文件
wget https://mirrors.tuna.tsinghua.edu.cn/ubuntu- ports/pool/main/i/icu/libicu55_55.1-7_arm64.deb
dpkg -i libicu55_55.1-7_arm64.deb
然后运行即可正常启动MVS。
5. 安装 PaddlePaddle
csdn: 在Jetson nano上编译paddle(带TensorRT)并跑通Paddle-Inference-Demo