void TIM8_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE);// 使能定时器时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOB , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_7; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //TIM_CH2, 3 4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
**************************************************************************************************************************************************************************************************************
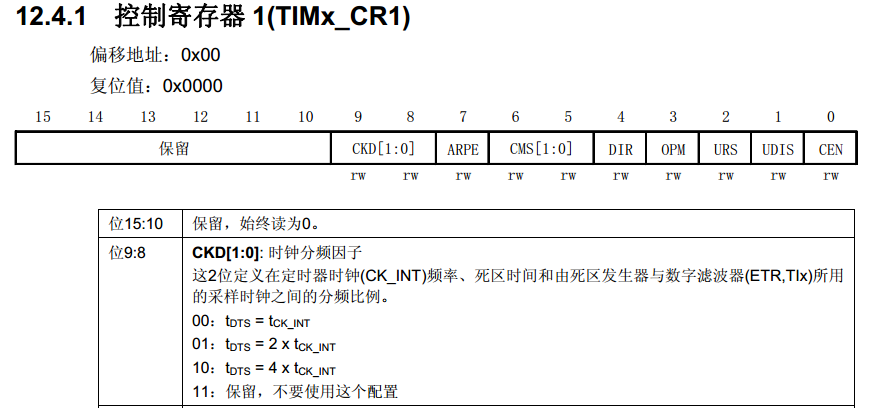
定时器1时钟挂在APB2总线上,时钟为72M 当TIM_ClockDivision = 0时, Tdts = 1/72M = 13.89ns
****************************************************************************************************************************************************************************************************************
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;//互补输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//ocx高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;//ocxn高电平有效
TIM_OC2Init(TIM8, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
**********************************************************************************************************************************************************************************************************************
| CC1P:输入/捕获1输出极性 (Capture/Compare 1 output polarity) CC1通道配置为输出: 0: OC1高电平有效; 1: OC1低电平有效。 |
| CC1NP:输入/捕获1互补输出极性 (Capture/Compare 1 complementary output polarity) 0: OC1N高电平有效; 1: OC1N低电平有效。 |
关于pwm模式1,2的区别可以看一看我的另一篇文章,有讲过=》》https://www.cnblogs.com/caiya/articles/9267844.html
我这里两个通道都是高电平有效
**********************************************************************************************************************************************************************************************************************
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; //锁定级别1 不能写入TIMx_BDTR寄存器的DTG、 BKE、 BKP、 AOE位和TIMx_CR2寄存器的OISx/OISxN位;
TIM_BDTRInitStructure.TIM_DeadTime = 0x2B; //死区时间为600ns
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable;//禁止刹车输入(不使能刹车功能)
TIM_BDTRConfig(TIM8,&TIM_BDTRInitStructure);
******************************************************************************************************************************************************************************************************************

关于死区设置,这里我先解释一下在说死区时间计算;
1死区:死区我通过示波器看,我理解是---
高电平有效时:
● OCx输出信号与参考信号相同,只是它的上升沿相对于参考信号的上升沿有一个延迟。
● OCxN输出信号与参考信号相反,只是它的上升沿相对于参考信号的下降沿有一个延迟。
低电平有效时:
● OCx输出信号与参考信号相同,只是它的下降沿相对于参考信号的下降沿有一个延迟。
● OCxN输出信号与参考信号相反,只是它的下降沿相对于参考信号的上升沿有一个延迟。
2刹车寄存器的设置:刹车源既可以是刹车输入引脚又可以是一个时钟失败事件。时钟失败事件由复位时钟控制器中的时钟安全系统产生 。通过这段话我理解是刹车是出于安全考虑,才使用。
因为我只需要死区,并不考虑刹车,也就是我不需要刹车功能,所以我要禁止刹车输入。
| 位12 | BKE: 刹车功能使能 (Break enable) 0:禁止刹车输入(BRK及CCS时钟失效事件); 1:开启刹车输入(BRK及CCS时钟失效事件)。 |
也因为我没有使用刹车,所以刹车极性我也没有必要设置。
| 位13 | BKP: 刹车输入极性 (Break polarity) 0:刹车输入低电平有效; 1:刹车输入高电平有效。 |
因为我是通过软件给MOE置1,所以AOE我也没有必要设置,就默认0就好
| 位14 | AOE: 自动输出使能 (Automatic output enable) 0: MOE只能被软件置’1’; 1: MOE能被软件置’1’或在下一个更新事件被自动置’1’(如果刹车输入无效)。 |
| 位15 | MOE: 主输出使能 (Main output enable) 一旦刹车输入有效,该位被硬件异步清’0’。根据AOE位的设置值,该位可以由软件清’0’或被自 动置1。它仅对配置为输出的通道有效。 0:禁止OC和OCN输出或强制为空闲状态; 1:如果设置了相应的使能位(TIMx_CCER寄存器的CCxE、 CCxNE位),则开启OC和OCN输 出。 |
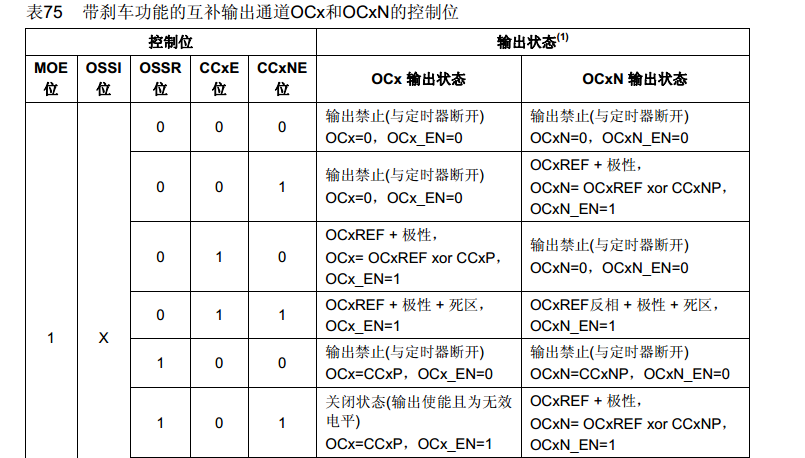
因为我没有使用刹车,所以我的MOE应该不会变成0,所以上面的表75中,OSSI我没有必要设置。
TIMx_CR2 寄存器中:
| 位9 | OIS1N:输出空闲状态1(OC1N输出) (Output Idle state 1) 0:当MOE=0时,死区后OC1N=0; 1:当MOE=0时,死区后OC1N=1。 注:已经设置了LOCK(TIMx_BKR寄存器)级别1、 2或3后,该位不能被修改。 |
| 位8 | OIS1:输出空闲状态1(OC1输出) (Output Idle state 1) 0:当MOE=0时,如果实现了OC1N,则死区后OC1=0; 1:当MOE=0时,如果实现了OC1N,则死区后OC1=1。 注:已经设置了LOCK(TIMx_BKR寄存器)级别1、 2或3后,该位不能被修改。 |
这些类似的地方我也没有必要设置。
为什么我要把OSSR置1呢?
其实这个程序中我将OSSR给1或者0都是一样的,因为从表75我们可以清楚的知道,ossr=0,则当CCXE,CCXNE=0时,两个通道都将输出0,而ossr=1时,CCXE,CCXNE=0时,两个通道将输出我们上面设置的CCXP/CCXNP的值,而这里我的这两个对应位是0,所以效果一样。但是我考虑到万一我需要失能时输出高电平的时候呢,万一我关闭定时器pwm通道的时候我需要通道输出的是高电平呢?所以我设置了此位为1.
| 位2 | CC1NE:输入/捕获1互补输出使能 (Capture/Compare 1 complementary output enable) 0:关闭- OC1N禁止输出,因此OC1N的电平依赖于MOE、 OSSI、 OSSR、 OIS1、 OIS1N和 CC1E位的值。 1:开启- OC1N信号输出到对应的输出引脚,其输出电平依赖于MOE、 OSSI、 OSSR、 OIS1、 OIS1N和CC1E位的值。 |
| 位0 | CC1E: 输入/捕获1输出使能 (Capture/Compare 1 output enable) CC1通道配置为输出: 0: 关闭- OC1禁止输出,因此OC1的输出电平依赖于MOE、 OSSI、 OSSR、 OIS1、 OIS1N 和CC1NE位的值。 1: 开启- OC1信号输出到对应的输出引脚,其输出电平依赖于MOE、 OSSI、 OSSR、 OIS1、 OIS1N和CC1NE位的值。 |
至于锁定嘛,看下面表格就知道了。
| 位9:8 | LOOK[1:0]: 锁定设置 (Lock configuration) 该位为防止软件错误而提供写保护。 00:锁定关闭,寄存器无写保护; 01:锁定级别1,不能写入TIMx_BDTR寄存器的DTG、 BKE、 BKP、 AOE位和TIMx_CR2寄存 器的OISx/OISxN位; 10:锁定级别2,不能写入锁定级别1中的各位,也不能写入CC极性位(一旦相关通道通过 CCxS位设为输出, CC极性位是TIMx_CCER寄存器的CCxP/CCNxP位)以及OSSR/OSSI位; 11:锁定级别3,不能写入锁定级别2中的各位,也不能写入CC控制位(一旦相关通道通过 CCxS位设为输出, CC控制位是TIMx_CCMRx寄存器的OCxM/OCxPE位); 注:在系统复位后,只能写一次LOCK位,一旦写入TIMx_BDTR寄存器,则其内容冻结直至复 位。 |
我设置的时锁定级别1.
3死区时间计算:
| 位7:0 | UTG[7:0]: 死区发生器设置 (Dead-time generator setup) 这些位定义了插入互补输出之间的死区持续时间。假设DT表示其持续时间: DTG[7:5]=0xx => DT=DTG[7:0] × Tdtg, Tdtg = TDTS; DTG[7:5]=10x => DT=(64+DTG[5:0]) × Tdtg, Tdtg = 2 × TDTS; DTG[7:5]=110 => DT=(32+DTG[4:0]) × Tdtg, Tdtg = 8 × TDTS; DTG[7:5]=111 => DT=(32+DTG[4:0])× Tdtg, Tdtg = 16 × TDTS; 例:若TDTS = 125ns(8MHZ),可能的死区时间为: 0到15875ns,若步长时间为125ns; 16us到31750ns,若步长时间为250ns; 32us到63us,若步长时间为1us; 64us到126us,若步长时间为2us; 注:一旦LOCK级别(TIMx_BDTR寄存器中的LOCK位)设为1、 2或3,则不能修改这些位。 |
举例600ns怎么来的:0x2b=00101011,这明显就是上面说的0xx型,所以时间=0x2b × Tdtg,上面我们设置始终分频因子的时候就已经知道tdtg=13.89ns,所以我们可以算出DT就约等与600ns。
*********************************************************************************************************************************************************************************************************************
TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable); //CH2预装载使能
TIM_ClearFlag(TIM8, TIM_FLAG_Update);//清除中断标志
TIM_ITConfig(TIM8, TIM_IT_CC2/*TIM 输入捕获中断源*/, ENABLE); //使能或者失能指定的TIM中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = TIM8_CC_IRQn;//TIM8捕捉比较中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_CtrlPWMOutputs(TIM8,ENABLE); //MOE 主输出使能 高级定时器需要这句 这个上面我粘贴了图标的,往上翻一番就知道了
TIM_ARRPreloadConfig(TIM8, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM8, ENABLE); //使能TIM8
}