参考视频:【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程_哔哩哔哩_bilibili
参考文档:http://www.autolabor.com.cn/book/ROSTutorials/
需求描述:
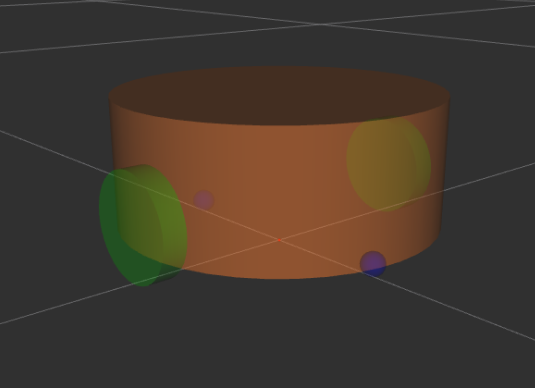
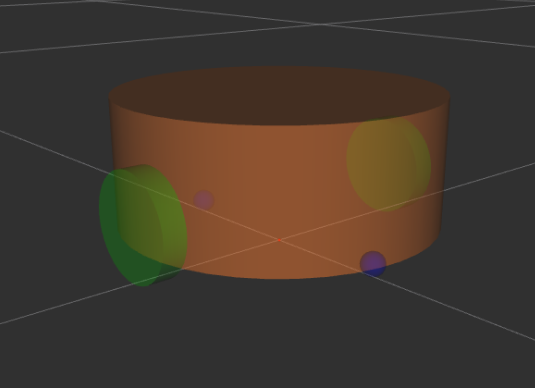
创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,两个万向轮为球状,半径 0.75cm,底盘离地间距为 1.5cm(与万向轮直径一致)
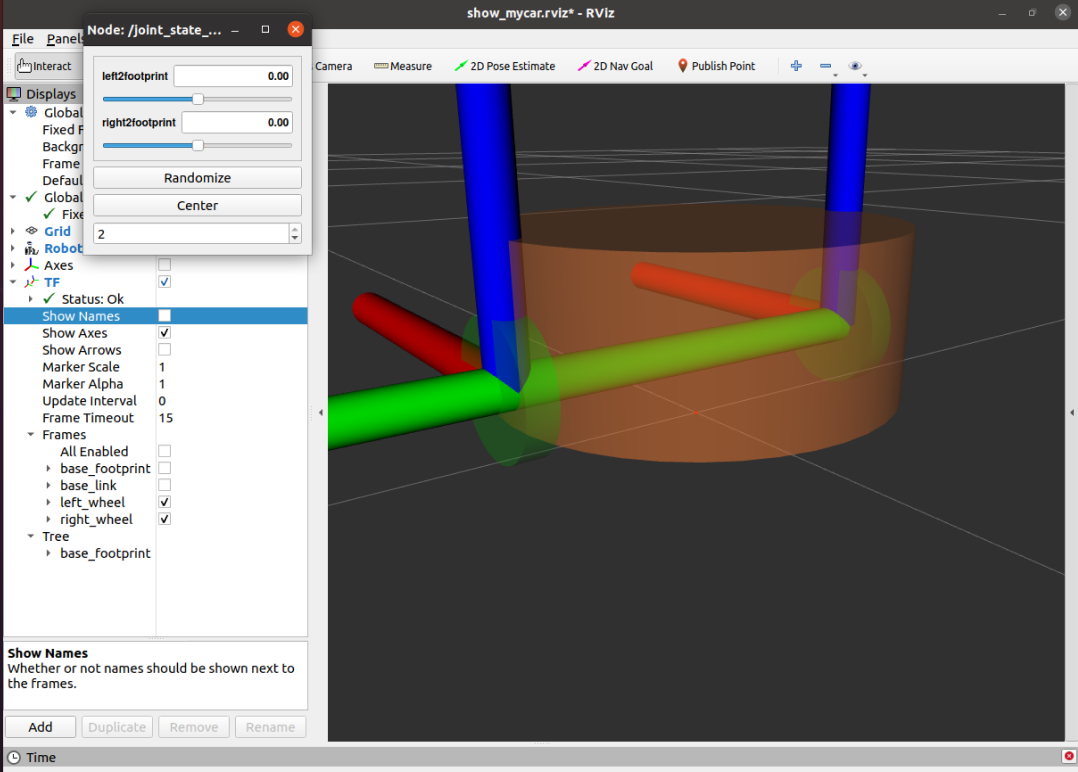
结果演示:
实现流程:
创建机器人模型可以分步骤实现
-
新建 urdf 文件,并与 launch 文件集成
-
搭建底盘
-
在底盘上添加两个驱动轮
-
在底盘上添加两个万向轮
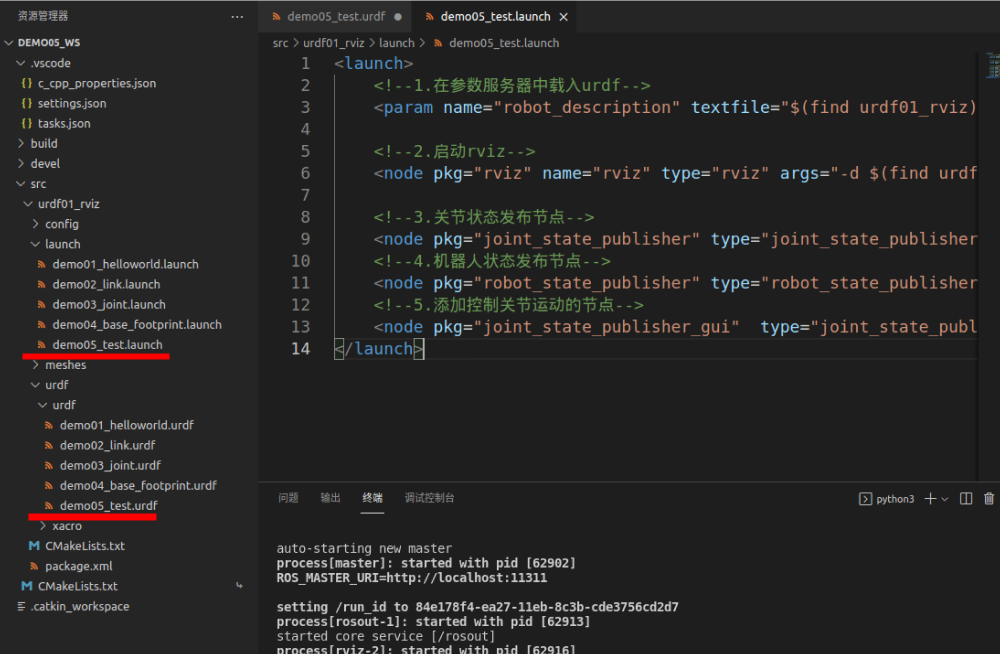
1.新建urdf以及launch文件
urdf 文件:基本实现
<robot name="mycar"> <!-- 设置 base_footprint --> <link name="base_footprint"> <visual> <geometry> <sphere radius="0.001" /> </geometry> </visual> </link> <!-- 添加底盘 --> <!-- 添加驱动轮 --> <!-- 添加万向轮(支撑轮) --> </robot>
launch 文件:
<launch> <!--1.在参数服务器中载入urdf--> <param name="robot_description" textfile="$(find urdf01_rviz)/urdf/urdf/demo05_test.urdf" /> <!--2.启动rviz--> <node pkg="rviz" name="rviz" type="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz"/> <!--3.关节状态发布节点--> <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher"/> <!--4.机器人状态发布节点--> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"/> <!--5.添加控制关节运动的节点--> <node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /> </launch>
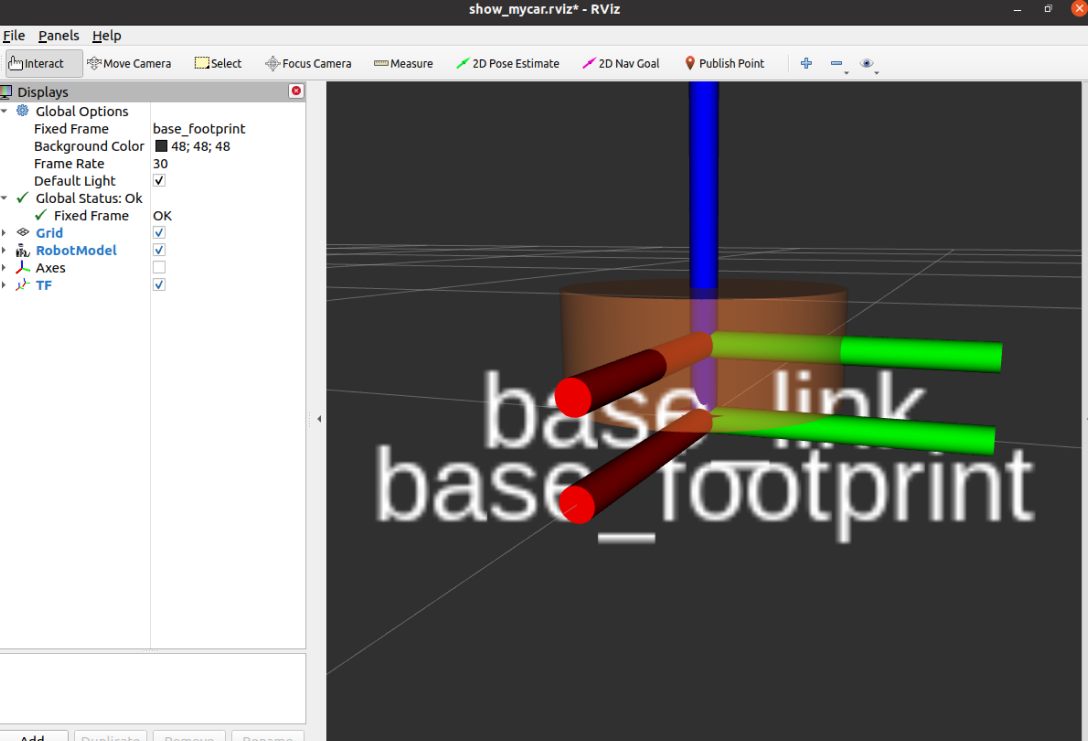
2.底盘搭建
<robot name="mycar"> <!--1.添加 base_footprint--> <link name="base_footprint"> <visual> <geometry> <sphere radius="0.001"/> </geometry> </visual> </link> <!--2.添加地盘--> <!-- 形状:圆柱 半径:0.1m 高度:0.08m 离地间距:0.012m --> <!--2.1.link--> <link name="base_link"> <visual> <geometry> <cylinder radius="0.1" length="0.08" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="baselink_color" > <color rgba="1.0 0.5 0.2 0.5" /> </material> </visual> </link> <!--2.2.join--> <joint name="link2footprint" type="fixed"> <parent link="base_footprint"/> <child link="base_link" /> <!--关节z上的设置 = 车体高度/2 + 离地间距--> <origin xyz="0 0 0.055" rpy="0 0 0" /> </joint> <!--3.添加驱动轮--> <!--4.添加万向轮--> </robot>
两个link之间的相对偏移量建议写在 joint 的 origin 里 ,方便各组件之间距离换算
3.添加驱动轮
<!--3.添加驱动轮--> <!-- 形状:圆柱 半径:0.035m 长度:0.015m --> <!--3.1.link--> <link name="left_wheel"> <visual> <geometry> <cylinder radius="0.0325" length="0.015" /> </geometry> <origin xyz="0 0 0" rpy="1.5708 0 0" /> <material name="leftwheel_color" > <color rgba="0 1.0 0 0.3" /> </material> </visual> </link> <link name="right_wheel"> <visual> <geometry> <cylinder radius="0.0325" length="0.015" /> </geometry> <origin xyz="0 0 0" rpy="1.5708 0 0" /> <material name="rightwheel_color" > <color rgba="0 1.0 0 0.3" /> </material> </visual> </link> <!--3.2.join--> <joint name="left2footprint" type="continuous"> <parent link="base_link"/> <child link="left_wheel" /> <!-- x 无偏移 y 车体半径 z z = 车体高度 / 2 + 离地间距 - 车轮半径 --> <origin xyz="0 0.1 -0.0225" rpy="0 0 0" /> <axis xyz="0 1 0" /> </joint> <joint name="right2footprint" type="continuous"> <parent link="base_link"/> <child link="right_wheel" /> <!-- x 无偏移 y 车体半径 z z = 车体高度 / 2 + 离地间距 - 车轮半径 --> <origin xyz="0 -0.1 -0.0225" rpy="0 0 0" /> <axis xyz="0 1 0" /> </joint>
4.添加万向轮
<!--4.添加万向轮--> <!-- 形状:球 半径:0.0075m --> <!--4.1.link--> <link name="front_wheel"> <visual> <geometry> <sphere radius="0.0075" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="frontwheel_color" > <color rgba="0 0 1 0.3" /> </material> </visual> </link> <link name="back_wheel"> <visual> <geometry> <sphere radius="0.0075" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="backwheel_color" > <color rgba="0 0 1 0.3" /> </material> </visual> </link> <!--4.2.joint--> <joint name="front2footprint" type="continuous"> <parent link="base_link"/> <child link="front_wheel" /> <origin xyz="0.08 0 -0.0475" rpy="0 0 0" /> <axis xyz="0 1 0" /> </joint> <joint name="back2footprint" type="continuous"> <parent link="base_link"/> <child link="back_wheel" /> <origin xyz="-0.08 0 -0.0475" rpy="0 0 0" /> <axis xyz="0 1 0" /> </joint>