什么是模式识别?
它指的是,对表征事物或现象的各种形式的信息进行处理和分析,从而达到对事物或现象进行描述、辨认、分类和解释的目的。
我们之所以可以很快辨别猫是猫、O不是0,就是因为在我们大脑中已经给猫的做了一个抽象,给O和0做了区分,这样我们才不用每次都重新靠思考和计算理解这到底是不是猫。这个在大脑中的抽象就是模式识别。
模式识别和机器学习的区别在于:前者喂给机器的是各种特征描述,从而让机器对未知的事物进行判断;后者喂给机器的是某一事物的海量样本,让机器通过样本来自己发现特征,最后去判断某些未知的事物。
什么是模板匹配?
机器学习炙手可热的今天,貌似好多人都信手拈来“K-NN”、“Bayes Classifier”、“PCA”这种主流的模式识别算法。但是我们今天要聊的是传统的、最简单的模板匹配。
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。它是图像处理中最基本、最常用的匹配方法。模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
简单来说,模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域。
怎么实现模板匹配?
在待检测图像上,从左到右,从上向下一个像素一个像素地移动模板,计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
怎么计算匹配度?
OpenCV中提供的模板识别的方法如下:
1.利用平方差来进行匹配,最好匹配为0.匹配越差,匹配值越大。
- TM_SQDIFF:平方差匹配
- TM_SQDIFF_NORMED:标准平方差匹配
2.采用模板和图像间的乘法操作,数越大表示匹配程度较高, 0表示最坏的匹配效果。
- TM_CCORR:相关性匹配
- TM_CCORR_NORMED:标准相关性匹配
3. 将模版对其均值的相对值与图像对其均值的相关值进行匹配,1表示完美匹配,-1表示糟糕的匹配,0表示没有任何相关性(随机序列)。
- TM_CCOEFF:相关性系数匹配
- TM_CCOEFF_NORMED:标准相关性系数匹配
总结:随着从简单的测量(平方差)到更复杂的测量(相关系数),我们可获得越来越准确的匹配(同时也意味着越来越大的计算代价)。
纸上得来终觉浅,绝知此事要躬行
上代码:
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace std;
using namespace cv;
/// Global Variables
bool use_mask;
Mat img; Mat templ; Mat mask; Mat result;
const char* image_window = "Source Image";
const char* result_window = "Result window";
int match_method;
int max_Trackbar = 5;
// Function Headers
void MatchingMethod( int, void* );
/**
* @function main
*/
int main( int argc, char** argv )
{
//MatchTemplate_Demo <image_name> <template_name>[<mask_name>]
// Load image and template
img = imread("F:/opencv/build/bin/sample-data/template-matching/Original_Image.jpg", IMREAD_COLOR );
templ = imread("F:/opencv/build/bin/sample-data/template-matching/Template_Image.jpg", IMREAD_COLOR );
use_mask = false;
//mask = imread("", IMREAD_COLOR);
if(img.empty() || templ.empty() || (use_mask && mask.empty()))
{
cout << "Can't read one of the images" << endl;
return -1;
}
// Create windows
namedWindow( image_window, WINDOW_AUTOSIZE );
namedWindow( result_window, WINDOW_AUTOSIZE );
// Create Trackbar
const char* trackbar_label = "Method:
0: SQDIFF
1: SQDIFF NORMED
2: TM CCORR
3: TM CCORR NORMED
4: TM COEFF
5: TM COEFF NORMED";
createTrackbar( trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod );
MatchingMethod( 0, 0 );
waitKey(0);
return 0;
}
/**
* @function MatchingMethod
* @brief Trackbar callback
*/
void MatchingMethod( int, void* )
{
// Source image to display
Mat img_display;
img.copyTo( img_display );
// Create the result matrix
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create( result_rows, result_cols, CV_32FC1 );
// Do the Matching and Normalize
bool method_accepts_mask = (TM_SQDIFF == match_method || match_method == TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{ matchTemplate( img, templ, result, match_method, mask); }
else
{ matchTemplate( img, templ, result, match_method); }
normalize( result, result, 0, 1, NORM_MINMAX, -1, Mat() );
// Localizing the best match with minMaxLoc
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
minMaxLoc( result, &minVal, &maxVal, &minLoc, &maxLoc, Mat() );
// For SQDIFF and SQDIFF_NORMED, the best matches are lower values. For all the other methods, the higher the better
if( match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED )
{ matchLoc = minLoc; }
else
{ matchLoc = maxLoc; }
// Show me what you got
rectangle( img_display, matchLoc, Point( matchLoc.x + templ.cols , matchLoc.y + templ.rows ), Scalar::all(0), 2, 8, 0 );
rectangle( result, matchLoc, Point( matchLoc.x + templ.cols , matchLoc.y + templ.rows ), Scalar::all(0), 2, 8, 0 );
imshow( image_window, img_display );
imshow( result_window, result );
return;
}
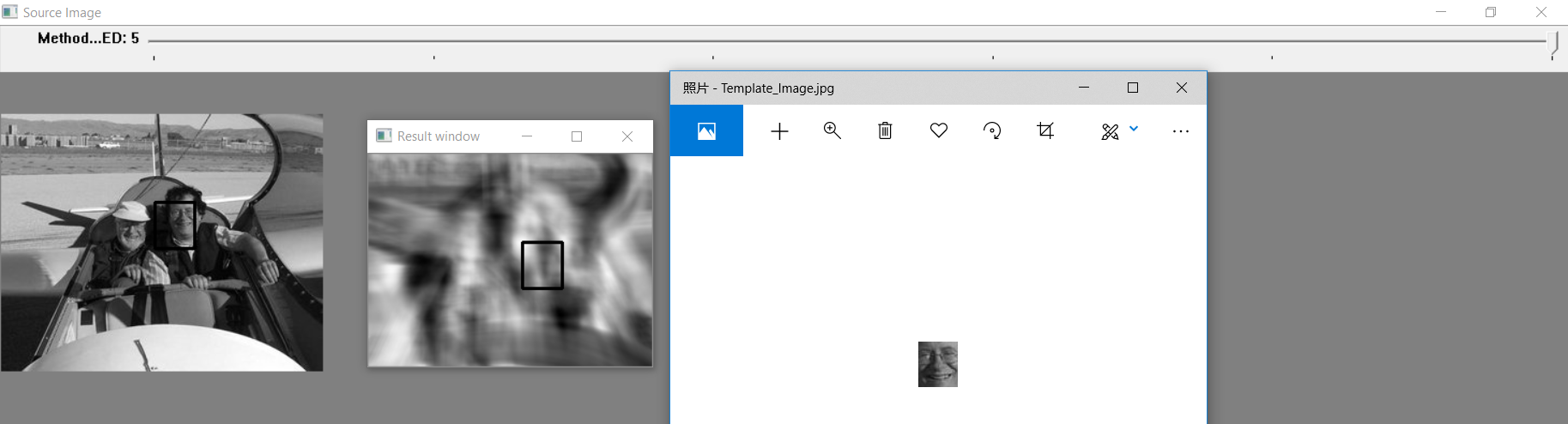
结果: