1 模型训练基本步骤
进入了AI领域,学习了手写字识别等几个demo后,就会发现深度学习模型训练是十分关键和有挑战性的。选定了网络结构后,深度学习训练过程基本大同小异,一般分为如下几个步骤
- 定义算法公式,也就是神经网络的前向算法。我们一般使用现成的网络,如inceptionV4,mobilenet等。
- 定义loss,选择优化器,来让loss最小
- 对数据进行迭代训练,使loss到达最小
- 在测试集或者验证集上对准确率进行评估
下面我们来看深度学习模型训练中遇到的难点及如何解决
2 模型训练难点及解决方法
2.1 收敛速度慢
深度学习其实就是一个反复调整模型参数的过程,得力于GPU等硬件性能的提升,使得复杂的深度学习训练成为了可能。收敛速度过慢,训练时间过长,一方面使得相同总训练时间内的迭代次数变少,从而影响准确率,另一方面使得训练次数变少,从而减少了尝试不同超参数的机会。因此,加快收敛速度是一大痛点。那么怎么解决它呢?
2.1.1 设置合理的初始化权重w和偏置b
深度学习通过前向计算和反向传播,不断调整参数,来提取最优特征,以达到预测的目的。其中调整的参数就是weight和bias,简写为w和b。根据奥卡姆剃刀法则,模型越简单越好,我们以线性函数这种最简单的表达式来提取特征,也就是
f(x) = w * x + b
深度学习训练时几乎所有的工作量都是来求解神经网络中的w和b。模型训练本质上就是调整w和b的过程,如果将他们初始化为一个合理的值,那么就能够加快收敛速度。怎么初始化w和b呢?
我们一般使用截断的正态分布(也叫高斯分布)来初始化w。如下
# 权重weight,标准差0.1。truncated_normal截断的正态分布来初始化weight。权重初始化很有讲究的,会决定学习的快慢
def weight_variable(shape, vname):
initial = tf.truncated_normal(shape, stddev=0.1, name=vname)
return tf.Variable(initial)tf.truncated_normal定义如下
tf.truncated_normal(
shape, # 正态分布输出数据结构,1维tensor
mean=0.0, # 平均值,默认为0.我们一般取默认值0
stddev=1.0, # 标准差
dtype=tf.float32, # 输出数据类型
seed=None, # 随机分布都会有一个seed来决定分布
name=None
)什么叫截断的正态分布呢,看下图就明白了
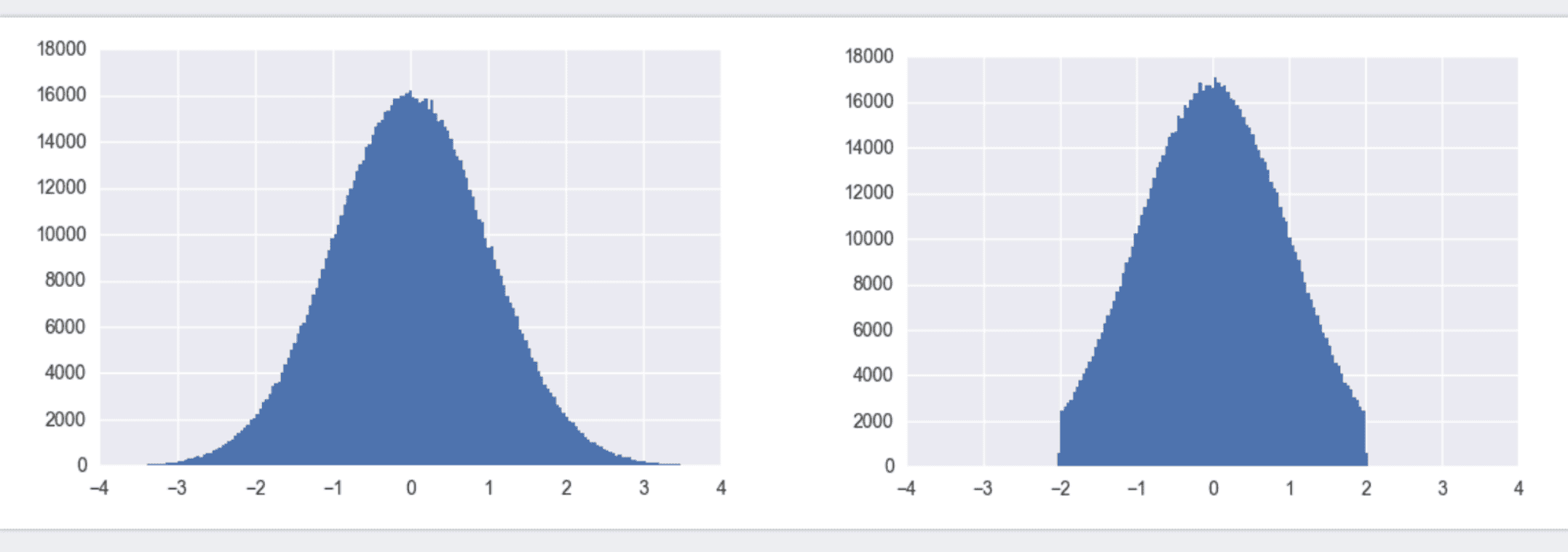
左图为标准正态分布,也叫高斯分布,利用TensorFlow中的tf.random_normal()即可得到x取值范围负无穷到正无穷内的值。所有的y值加起来概率为1。初始化w时,我们没必要将w初始化为很大或很小的数。故更倾向于使用截断正态分布,如右图。它和标准正态分布的区别在于,限制了x取值必须在[-2 x stddev, 2 x stddev]之间。
b由于是加和关系,对收敛速度影响不大。我们一般将它初始化为0,如下。
# 偏置量bias,初始化为0,偏置可直接使用常量初始化
def bias_variable(shape, vname):
initial = tf.constant(0, shape=shape, name=vname)
return tf.Variable(initial)2.1.2 优化学习率
模型训练就是不断尝试和调整不同的w和b,那么每次调整的幅度是多少呢,这个就是学习率。w和b是在一定范围内调整的,那么增大学习率不就减少了迭代次数,也就加快了训练速度了吗?路虽长,步子迈大点不就行了吗?非也,步子迈大了可是会扯到蛋的!深度学习中也是如此,学习率太小,会增加迭代次数,加大训练时间。但学习率太大,容易越过局部最优点,降低准确率。
那有没有两全的解决方法呢,有!我们可以一开始学习率大一些,从而加速收敛。训练后期学习率小一点,从而稳定的落入局部最优解。使用Adam,Adagrad等自适应优化算法,就可以实现学习率的自适应调整,从而保证准确率的同时加快收敛速度。
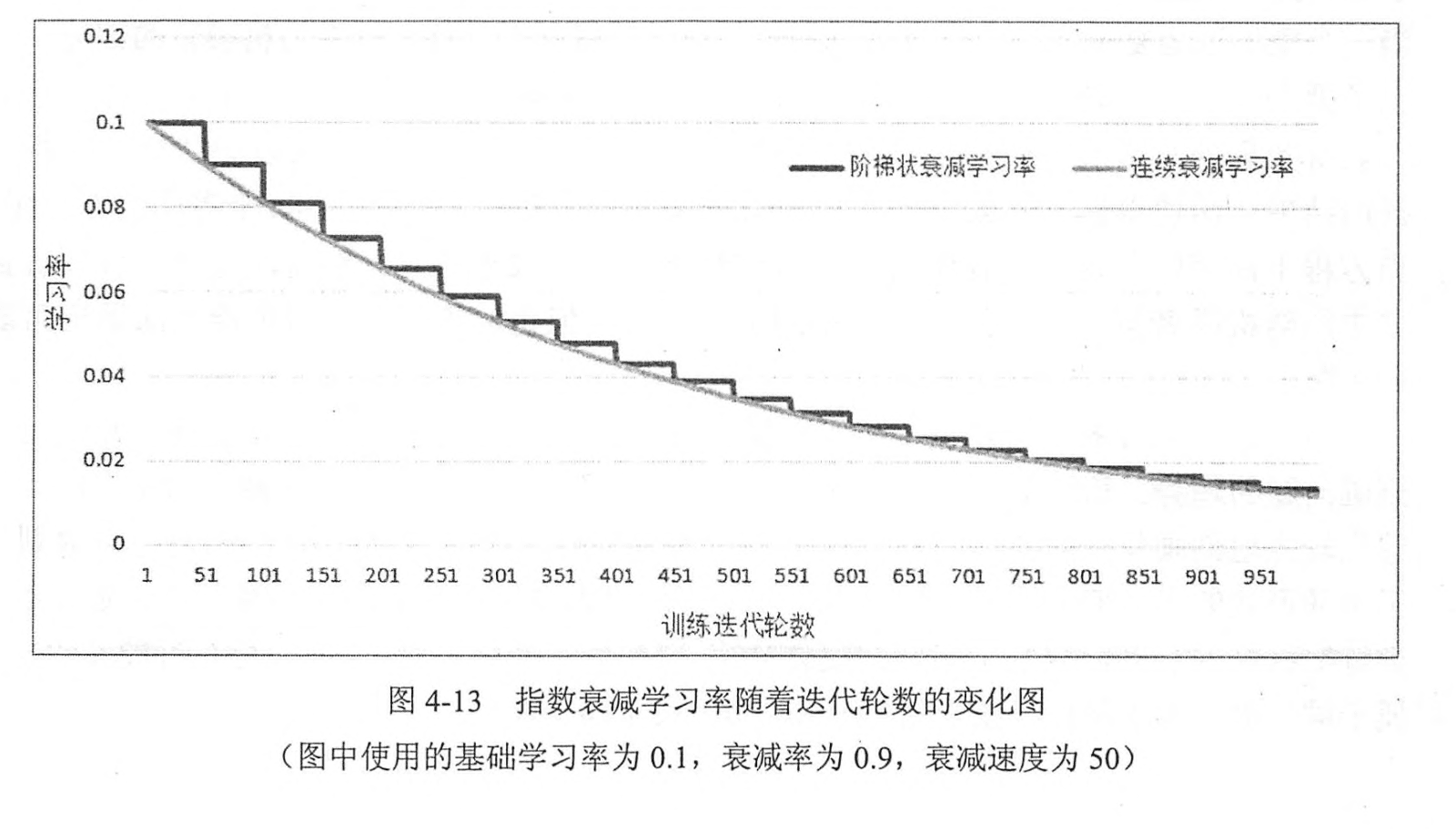
如上图所示,随着迭代次数的增加,学习率从0.1逐步衰减为0.02以下。
2.1.3 网络节点输入值正则化 batch normalization
神经网络训练时,每一层的输入分布都在变化。不论输入值大还是小,我们的学习率都是相同的,这显然是很浪费效率的。而且当输入值很小时,为了保证对它的精细调整,学习率不能设置太大。那有没有办法让输入值标准化得落到某一个范围内,比如[0, 1]之间呢,这样我们就再也不必为太小的输入值而发愁了。
办法当然是有的,那就是正则化!由于我们学习的是输入的特征分布,而不是它的绝对值,故可以对每一个mini-batch数据内部进行标准化,使他们规范化到[0, 1]内。这就是Batch Normalization,简称BN。由大名鼎鼎的inception V2提出。它在每个卷积层后,使用一个BN层,从而使得学习率可以设定为一个较大的值。使用了BN的inceptionV2,只需要以前的1/14的迭代次数就可以达到之前的准确率,大大加快了收敛速度。
2.1.4 采用更先进的网络结构,减少参数量
训练速度慢,归根结底还是网络结构的参数量过多导致的。减少参数量,可以大大加快收敛速度。采用先进的网络结构,可以用更少的参数量达到更高的精度。如inceptionV1参数量仅仅为500万,是AlexNet的1/12, 但top-5准确率却提高了一倍多。如何使用较少的参数量达到更高的精度,一直是神经网络结构研究中的难点。目前大致有如下几种方式
- 使用小卷积核来代替大卷积核。VGGNet全部使用3x3的小卷积核,来代替AlexNet中11x11和5x5等大卷积核。小卷积核虽然参数量较少,但也会带来特征面积捕获过小的问题。inception net认为越往后的卷积层,应该捕获更多更高阶的抽象特征。因此它在靠后的卷积层中使用的5x5等大面积的卷积核的比率较高,而在前面几层卷积中,更多使用的是1x1和3x3的卷积核。
- 使用两个串联小卷积核来代替一个大卷积核。inceptionV2中创造性的提出了两个3x3的卷积核代替一个5x5的卷积核。在效果相同的情况下,参数量仅为原先的3x3x2 / 5x5 = 18/25
- 1x1卷积核的使用。1x1的卷积核可以说是性价比最高的卷积了,没有之一。它在参数量为1的情况下,同样能够提供线性变换,relu激活,输入输出channel变换等功能。VGGNet创造性的提出了1x1的卷积核
- 非对称卷积核的使用。inceptionV3中将一个7x7的卷积拆分成了一个1x7和一个7x1, 卷积效果相同的情况下,大大减少了参数量,同时还提高了卷积的多样性。
- depthwise卷积的使用。mobileNet中将一个3x3的卷积拆分成了串联的一个3x3 depthwise卷积和一个1x1正常卷积。对于输入channel为M,输出为N的卷积,正常情况下,每个输出channel均需要M个卷积核对输入的每个channel进行卷积,并叠加。也就是需要MxN个卷积核。而在depthwise卷积中,输出channel和输入相同,每个输入channel仅需要一个卷积核。而将channel变换的工作交给了1x1的卷积。这个方法在参数量减少到之前1/9的情况下,精度仍然能达到80%。
- 全局平均池化代替全连接层。这个才是大杀器!AlexNet和VGGNet中,全连接层几乎占据了90%的参数量。inceptionV1创造性的使用全局平均池化来代替最后的全连接层,使得其在网络结构更深的情况下(22层,AlexNet仅8层),参数量只有500万,仅为AlexNet的1/12
网络结构的推陈出新,先进设计思想的不断提出,使得减少参数量的同时提高准确度变为了现实。
2.1.5 使用GPU并行计算
深度学习模型训练,基本由卷积计算和矩阵乘法构成,他们都很适合并行计算。使用多块GPU并行加速已经成为了深度学习的主流,可以大大加快收敛速度。要达到相同的精度,50块GPU需要的时间仅为10块的1/4左右。当前Google早已开始了TPU这种专门用于深度学习的Asic芯片的研究,国内的寒武纪等公司也在大张旗鼓的研究专用于AI的芯片。AI芯片的前景也是十分广阔的。
2.2 线性模型的局限性
根据奥卡姆剃刀法则,我们使用了最简单的线性模型,也就是wx+b,来表征了神经网络。线性模型的特点是,任意线性模型的组合仍然是线性模型。不论我们采用如何复杂的神经网络,它仍然是一个线性模型。然而线性模型能够解决的问题毕竟是有限的,所以必须在神经网络中增加一些非线性元素。
2.2.1 激活函数的使用
在每个卷积后,加入一个激活函数,已经是通用的做法,相信大家都知道。激活函数,如relu,tanh,sigmod都是非线性函数,一方面可以增加模型的非线性元素,另一方面可以降低梯度弥散问题(我们后面详细讲解)。目前使用较多的就是relu函数。他模拟了生物学上的阈值响应机制,利用人脑只对大于某个值的信号才产生响应的机制,提出了单侧抑制的理念。它的表达式很简单,f(x)=max(0,x)。当x>0时,y=x, x<0时,y=0. 如下图所示。

相比于tanh和sigmod,relu的优点有:
- 计算速度快,容易收敛。relu就是一个取max的函数,没有复杂的运算,故计算速度很快。相比于tanh,收敛速度可加快6倍
- 梯度不会大幅缩小。x>0时,relu的梯度为1(梯度还不懂是啥意思的同学最好翻下数学书,梯度简单理解就是偏导数),故相比sigmod这种x稍微远离0,梯度就会大幅减小的函数,不会使得梯度缩小,从而引发多层传播后的梯度弥散问题。
2.2.2 两个小卷积核的叠加代替一个大卷积核
激活函数可是一个增加非线性的大法宝,但我们一般只能在卷积完之后再使用它。那怎么增加它的使用场景呢?增加卷积层不就行了吗。inception V2创造性的提出了用两个3x3的卷积核代替一个5x5的卷积核。每次卷积后,都使用一次relu非线性激活。如下图。

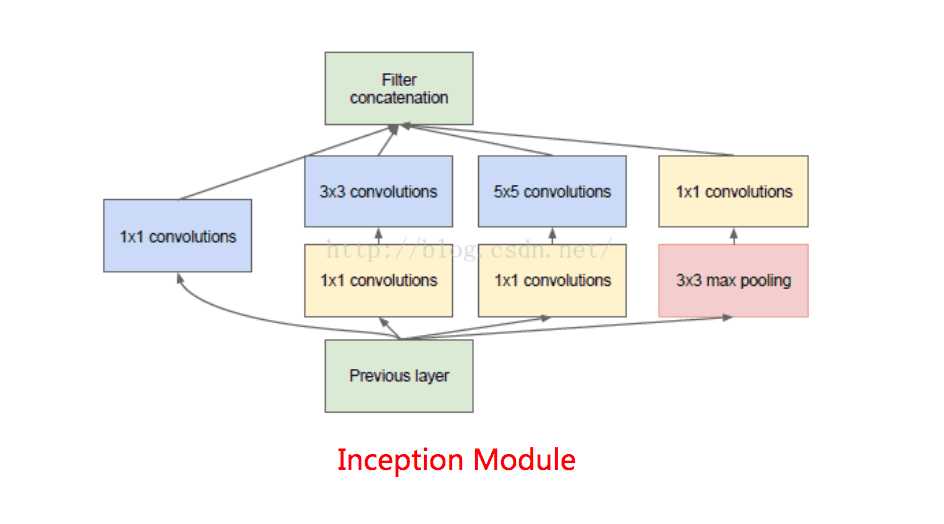
2.2.3 1x1小卷积核的使用
1x1的卷积核应该是性价比最高的卷积,它在参数量为1的情况下,同样能够提供线性变换,relu激活,输入输出channel变换等功能。inceptionV1利用Network in Network的思想,提出了inception module这一结构,它在每个并行分支的最前面,使用了一个1x1的卷积,卷积后紧跟一个relu激活。从而大大增加了relu的使用率。从而提高了模型的非线性特征。
2.3 过拟合问题
过拟合在机器学习中广泛存在,指的是经过一定次数的迭代后,模型准确度在训练集上越来越好,但在测试集上却越来越差。究其原因,就是模型学习了太多无关特征,将这些特征认为是目标所应该具备的特征。如下图
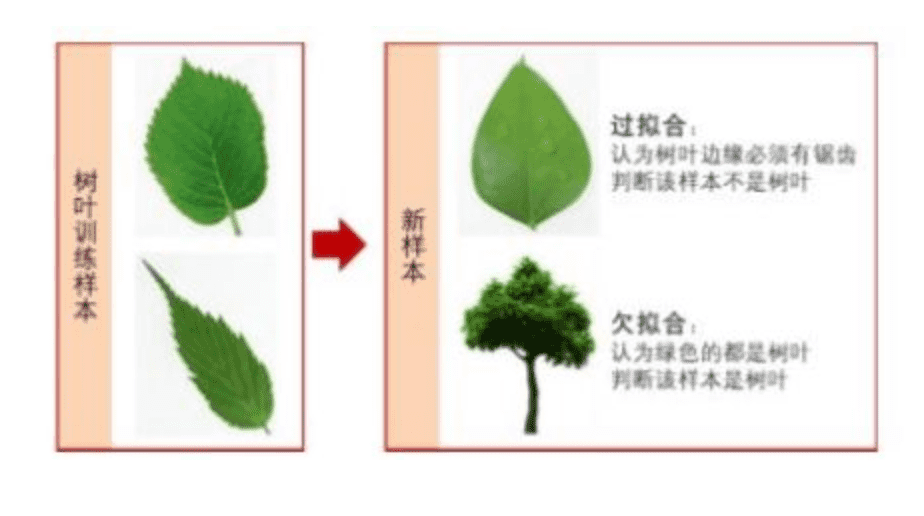
如上图所示,树叶训练样本中边缘带有锯齿,模型学习了锯齿这一特征,认为树叶必须带有锯齿,从而判定右侧的不带锯齿的树叶不是树叶。这就是典型的过拟合问题。神经网络中,因为参数众多,经常出现参数比输入样本数据还多的情况,这就导致很容易出现模型只记住了训练集特征的情况。我们有两个思路来解决这个问题。一是增大样本量,另外就是减少特征量。
2.3.1 输入增强,增大样本量
收集更多且更全的样本,能有效降低过拟合。但寻找样本本来就是一件很费力的事情,我们到哪儿去寻找更多更全的样本呢。素材整理和数据获取成为了深度学习的一大瓶颈,否则再牛逼的神经网络结构,也会称为无米之炊。这也是当前迁移学习变得比较火热的一大原因(这是后话,就不详细展开了)。那我们有没有办法简单快捷的增加样本量呢?
答案是有的,可以使用输入增强方法。对样本进行旋转,裁剪,加入随机噪声等方式,可以大大增加样本数量和泛化性。目前TensorFlow就提供了大量方法进行数据增强,大大方便了我们增加样本数量。
2.3.2 dropout,减少特征量
使用dropout,将神经网络某一层的输出节点数据随机丢弃,从而减少特征量。这其实相当于创造了很多新的随机样本。我们可以理解为这是对特征的一次采样。一般在神经网络的全连接层使用dropout。
2.4 梯度弥散, 无法使用更深的网络
深度学习利用正向传播来提取特征,同时利用反向传播来调整参数。反向传播中梯度值逐渐减小,神经网络层数较多时,传播到前面几层时,梯度接近于0,无法对参数做出指导性调整了,此时基本起不到训练作用。这就称为梯度弥散。梯度弥散使得模型网络深度不能太大,但我们都知道网络越深,提取的特征越高阶,泛化性越好。因此优化梯度弥散问题就很重要了
2.4.1 relu代替sigmoid激活函数
sigmoid函数值在[0,1],ReLU函数值在[0,+无穷]。relu函数,x>0时的导数为1, 而sigmoid函数,当x稍微远离0,梯度就会大幅减小,几乎接近于0,所以在反向传播中无法指导参数更新。
2.4.2 残差网络
大名鼎鼎的resNet将一部分输入值不经过正向传播网络,而直接作用到输出中。这样可以提高原始信息的完整性了,从而在反向传播中,可以指导前面几层的参数的调整了。如下图所示。
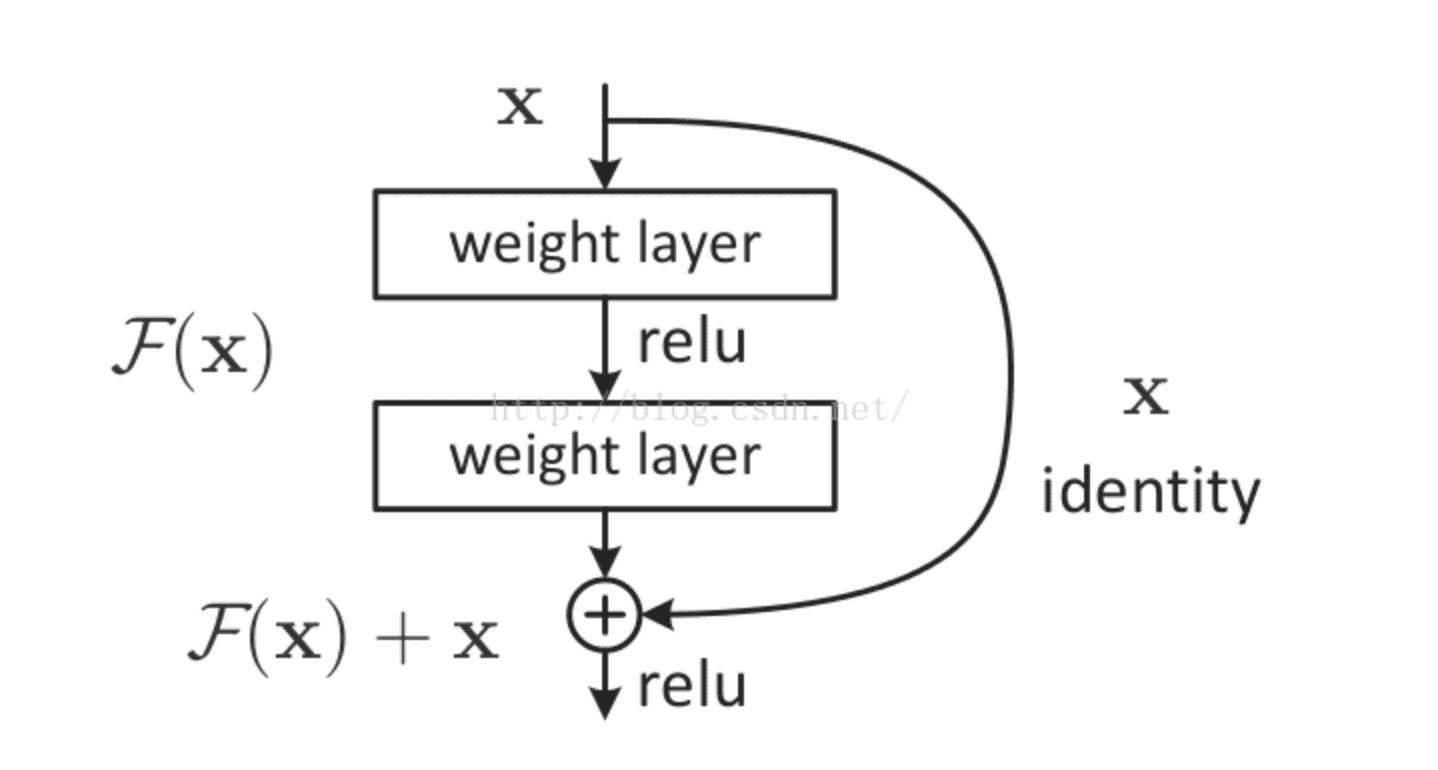
使用了残差网络的resNet,将网络深度提高到了152层,大大提高了模型的泛化性,从而提高了预测准确率,并一举问鼎当年的imageNet冠军!
3 总结
深度学习模型训练是一个很费时间,但也很有技巧的过程。模型训练中有梯度弥散,过拟合等各种痛点,正是为了解决这些问题,不断涌现出了各种设计精巧的网络结构。学习时,我们不仅要学习网络结构的设计方式,还要掌握它们的设计思想,了解它们是为了解决哪些问题而产生的,以及准确率和性能为何能够得到提升。
本文主体内容参考链接:https://yq.aliyun.com/articles/598429?spm=a2c4e.11153940.blogrightarea598428.36.640a783bV593ki