1.TOF相机简介:
TOF是Time of flight的简写,直译为飞行时间的意思。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后利用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物的距离。TOF的深度精度不随距离改变而变化,基本能稳定在cm级。
2.TOF相机缺点:
- 测量距离较常规测量仪器短,一般不超过 10 米
- 测量结果受被测物性质的影响
- 大多数机器的测量结果受外界环境干扰较为明显,尤其是受外界光源干扰
- 分辨率相对较低,实验室应用的是德国MESA:SR4000型号相机,其分辨率仅为 204×204像素
噪声模型:
 fmod :i IR frequency of the signal sent by the ToF emitters, A: amplitude image ; B : is the intensity image at pixel pi .
fmod :i IR frequency of the signal sent by the ToF emitters, A: amplitude image ; B : is the intensity image at pixel pi .

FROM--------------<<Probabilistic ToF and Stereo Data Fusion Based on Mixed Pixels Measurement Models>>
3.提供Confidence Map:
The confidence map is generated in the driver of the host PC using a combination of distance and amplitude measurements and their temporal variations. It represents a measure of probability or “confidence” of how correct the distance measurement is expected to be. Low confidence is typically due to low reflected signal or movement in the scene. The Confidence Map can be used to
• select regions containing measurements of high quality
• reject measurements of low quality
• obtain a confidence measure for a measurement derived from a combination of many pixel
• estimate an output reliability in recognition algorithms
Confidence map data is output from the SR4000/SR4500 as an array of 16 bit words. There is one confidence value per pixel. The Confidence Map has a range of 0-0xFFFF, with greater values representing higher confidence.
4.TOF 相机去噪和超分辨的方法:
- TOF相机+数据库的,利用字典信息
- TOF+彩色图的引导
- TOF+彩色图+立体匹配(fusion)
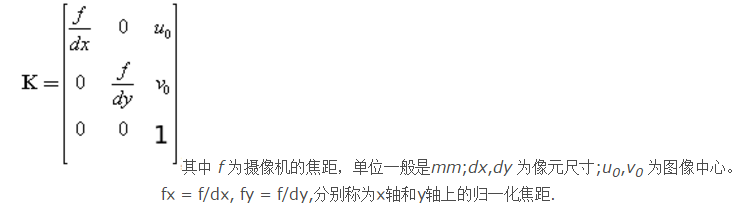
5.相机的标定
摄像机标定的目的:求出相机的内、外参数,以及畸变参数。
内参数:相机坐标转化为像素坐标:
外参数:世界坐标系到相机坐标系
旋转向量(大小为1×3的矢量或旋转矩阵3×3)和平移向量(tx,ty,tz)。
旋转向量:旋转向量是旋转矩阵紧凑的变现形式,旋转向量为1×3的行矢量。
罗格斯变换(Opencv或高博的《SLAM 十四讲》)
标定的原理:
需要求解4个内参数和6K个外参数
N个角点和K个棋盘图像,可以提供2NK的约束,即2NK的方程。(乘以2是因为每个点都由x和y两个坐标值组成)
2NK>=6K+4,或者写成(N-3)K>=2
一个棋盘有用的N为4,带入知道N>2
求解过程:令单应性矩阵H是物理变换(旋转、平移)和相机内参数组成。

M是摄像机内参数矩阵,r1,r2是旋转矢量3×1,t是平移矢量,缩放因子s,对应项相等得到如下:
http://www.cnblogs.com/Jessica-jie/p/6596450.html
6.各种变化:
1.欧式变化 【R T/ 0 1】 3+3=6; 长度,夹角,体积比不变
2.相似变换【sR T/ 0 1】6+1=7 体积比
3.仿射变换 【A T/ 0 1】12 平行性,体积比
4.摄影变换 【A T/ a v】15 接触平面相交相切