http://www.cnblogs.com/firege/p/5806121.html (驱动大神)
http://blog.csdn.net/yanbixing123/article/details/52299519
ov5640作为外接摄像头设备,通过i2c与主板通信
先介绍一下摄像头相关的术语 :
黑电平校正 : 去除暗电流导致的噪声;
镜头校正 : 校正镜头导致的光强畸变 ;
坏点校正 : 掩盖静态和动态坏点
降噪 : 去除各种采集过程导致噪声
颜色校正 ; 校正到人眼响应曲线
Bayer还原 : RGB马赛克图像插值
自动对焦 : 计算对焦参考信息 控制对焦过程
自动白平衡(Automatic White Balance) : 目标是模拟人脑处理过程,实现彩色恒常性
自动曝光(Auto Exposure Control) : 选择合理曝光时间,和曝光增益,实现曝光度的自动调节
50/60Hz检测 : 解决白炽灯这类工频干扰
伽马校正 : 输出适合显示器显示图像
图像增强 : 分为宽动态处理,边缘增强,去雾等
ov5640手册上写明可配:
ov5640摄像头配置的难点
一、pll配置

根据该图计算输出时钟pclk用于计算帧率
二、同步方式
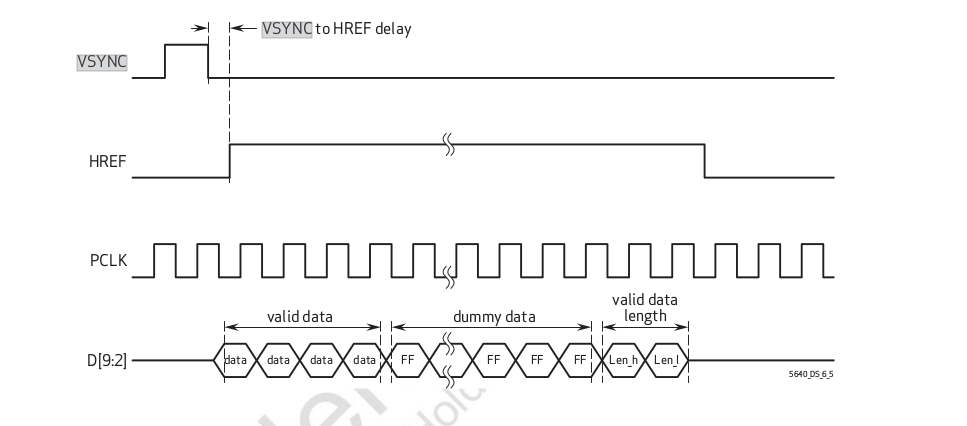
vsync时钟为帧同步时钟,href为行同步时钟
其低电平分别为场消隐期和行消隐期
三、分辨率设置
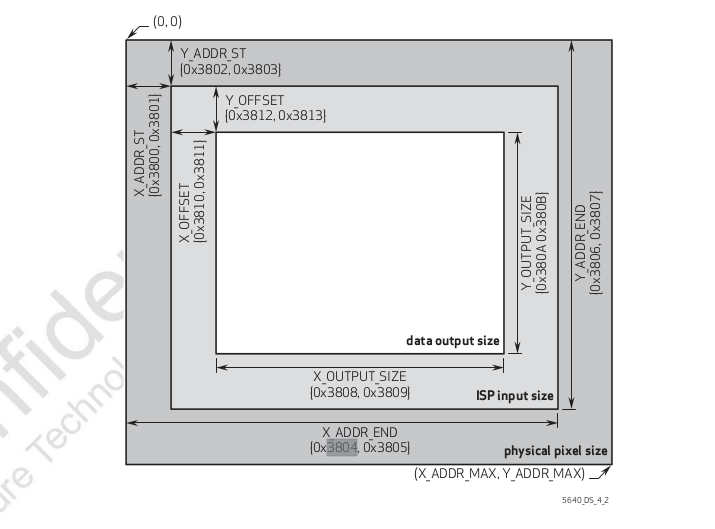
如图,可配置输出output_size,720p配置1280*720
其中重要的两个寄存器是0x380c ~ 0x380f配置hts和vts,和帧率相关
其他配置网上都能找到,根据实际情况自行调节即可