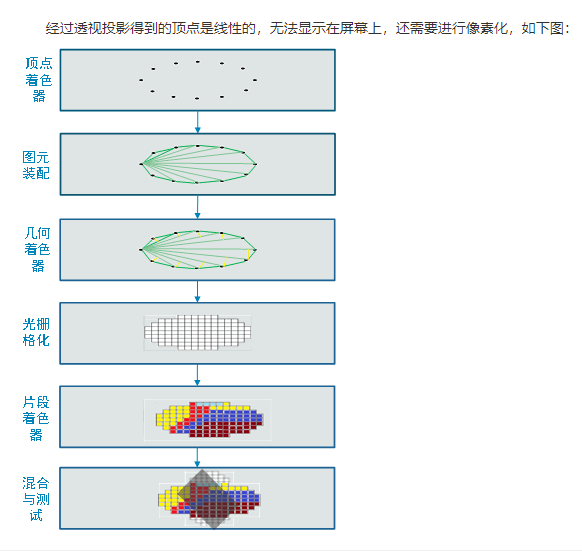
Vertex shader (顶点着色器):通过编程的方式实现对顶点的操作,如空间转换,颜色,纹理坐标,灯光 得到最终的顶点数据后,输出到片元着色器
顶点着色器可以用来指定一系列完全通用的(如坐标,灯光,颜色,纹理)、并将应用于各个顶点及相关数据上的操作。
Fragment shader(片元着色器):在像素没显示到屏幕之前,将要执行一些列操作,这些操作可能会修改甚至丢弃这些片断。所有这些操作都可以被启用或禁用。第一个可能执行的操作时纹理处理。在纹理内存中为每个片断生成一个纹理单元(texel,也就是纹理元素,也就是uv),并应用到这个片断上。接着可能进行的是雾计算,然后是剪裁测试,alpha测试,模板测试和深度缓冲区测试(深度缓冲区用于消除被隐藏的表面)。如果一个片断无法通过一个启用的测试,它的连续处理过程可能会被中断。随后,将要执行的可能是混合,抖动,逻辑操作以及根据一个位掩码的屏蔽操作。最后,经过完整处理的片断就被绘制到适当的缓冲区,最终成为一个像素并到达它的最终栖息地。
物体的坐标抓换:本地坐标(原点为自身轴向为自身)->惯性坐标-(原点为自身轴向与世界坐标系重合)->世界坐标(原点与世界坐标重合 然后旋转到本地的轴向)->相机坐标(我个人比较喜欢叫相机坐标,书面化说法又称视锥体坐标,其实就是相机的视角是个四棱锥或长方体)->在相机视角中对三维的坐标进行降维操作(https://www.bilibili.com/video/av37614073?from=search&seid=2402871598313506313 1:09了解一下)->
接下来就介绍下Shader的三大测试:
深度测试:
深度:指该像素距离摄像机的距离。离摄像机越远,深度越大。
深度缓冲:存储着每个像素对应的深度值。
颜色缓冲:存储着每个像素对应的颜色值。
深度测试:将像素的深度与深度缓冲的深度进行比较。如果通过了深度测试,就有机会去改写深度缓冲的对应值;否则该像素会被舍弃
Zwrite
参数 On/Off 开启/关闭深度写入
ZText
Greater GEqual Equal Less LEqual NotEqual Always Never
分别对应
> >= == < <= != 总是 从不
像素对比GBuffer中的像素,满足条件则替换。否则舍弃,物体的像素渲染并不是直接就到屏幕上,需要计算,符合条件则通过测试,最终到屏幕上。
Alpha测试:
Alpha Test ,中文就是透明度测试。简而言之就是V&F shader中最后fragment函数输出的该点颜色值(即上一讲frag的输出half4)的alpha值与固定值进行比较。 AlphaTest语句通常位于Pass{}中的起始位置。
模板测试:
模版测试较为复杂,它不像Alpha测试一样,单单通过简单的大于小于等运算符来比较,但是和Alpha测试一样,都是测试像素点,符合要求的就渲染,不符合要求的就不渲染。了解模版测试,需要理解较多术语:
1.GBuffer:几何缓冲,相当于一个容器
2.RefenceValue:模版值,Guffer中的像素点就是与这个值按位与后进行比较
3.stencilOperation:比较后进行的操作
4.ReadMask|WriteMask:读遮罩|写遮罩
理解了以上的术语,那么模版测试的公式就差不多可以理解了:其公式为:
referenceValue&readMask comparisonFunction stencilBufferValue&readMask
转:https://blog.csdn.net/coolbeliever/article/details/81979089
关于逐顶点和逐像素:
per-vertex是先计算再插值,per-pixel是先插值后计算。后者的控制粒度是pixel(像素),前者是triangle(三角形)。
左边逐个像素 右边逐个顶点 可以明显的看到分割处的三角面