本文大纲
本系列文章已经开源到github:https://github.com/farmer-hutao/k8s-source-code-analysis
1. 预选流程
predicate过程从pkg/scheduler/core/generic_scheduler.go:389 findNodesThatFit()方法就算正式开始了,这个方法根据给定的predicate functions过滤所有的nodes来寻找一堆可以跑pod的node集。老规矩,我们来看主干代码:
pkg/scheduler/core/generic_scheduler.go:389
func (g *genericScheduler) findNodesThatFit(pod *v1.Pod, nodes []*v1.Node) ([]*v1.Node, FailedPredicateMap, error) {
checkNode := func(i int) {
fits, failedPredicates, err := podFitsOnNode(
//……
)
if fits {
length := atomic.AddInt32(&filteredLen, 1)
filtered[length-1] = g.cachedNodeInfoMap[nodeName].Node()
}
}
workqueue.ParallelizeUntil(ctx, 16, int(allNodes), checkNode)
if len(filtered) > 0 && len(g.extenders) != 0 {
for _, extender := range g.extenders {
// Logic of extenders
}
}
return filtered, failedPredicateMap, nil
}
如上,删的有点多,大家也可以看一下原函数然后对比一下,看看我为什么只保留这一点。从上面代码中我们可以发现,最重要的是一个子函数调用过程fits, failedPredicates, err := podFitsOnNode(),这个函数的参数我没有贴出来,下面会详细讲;下半部分是一个extender过程,extender不影响对predicate过程的理解,我们后面专门当作一个主题讲。所以这里的关注点是podFitsOnNode()函数。
2. predicate的并发
进入podFitsOnNode()函数逻辑之前,我们先看一下调用到podFitsOnNode()函数的匿名函数变量checkNode是怎么被调用的:
pkg/scheduler/core/generic_scheduler.go:458
workqueue.ParallelizeUntil(ctx, 16, int(allNodes), checkNode)
ParallelizeUntil()函数是用于并行执行N个独立的工作过程的,这个逻辑写的挺有意思,我们看一下完整的代码(这段的分析思路写到注释里哦):
vendor/k8s.io/client-go/util/workqueue/parallelizer.go:38
func ParallelizeUntil(ctx context.Context, workers, pieces int, doWorkPiece DoWorkPieceFunc) {
// 从形参列表看,需要关注的有workers和pieces两个数字类型的参数,doworkPiece这个函数类型的参数
// DoWorkPieceFunc类型也就是func(piece int)类型
// 注意到上面调用的时候workers的实参是16,pieces是allNodes,也就是node数量
var stop <-chan struct{}
if ctx != nil {
stop = ctx.Done()
}
// 这里定义toProcess的容量和pieces相等,也就是和node数量相等
toProcess := make(chan int, pieces)
for i := 0; i < pieces; i++ {
// 假设有100个node,那么这里就写了100个数到toProcess里
toProcess <- i
}
// 关闭了一个有缓存的channel
close(toProcess)
// 如果pieces数量比较少,也就是说假设node只有10个,那么workers就赋值为10个
// 到这里差不多可以猜到worker是并发工作数,当node大于16时并发是16,当node小于16时并法数就是node数
if pieces < workers {
workers = pieces
}
wg := sync.WaitGroup{}
wg.Add(workers)
// 要批量开goroutine了
for i := 0; i < workers; i++ {
// 如果100个node,这里时16;如果是10个node,这里是10
go func() {
defer utilruntime.HandleCrash()
defer wg.Done()
for piece := range toProcess {
// 从toProcess中拿一个数,举个例子,假如现在并发是10,那么toProcess里面存的数据其实
// 也是10个,也就是1个goroutine拿到1个数,开始了一个下面的default逻辑;
// 假设并发数是16,node数是100,这时候toProcess里面也就是100个数,
// 这时候就是16个“消费者”在消耗100个数。当然每拿到一个数需要执行到一次下面的default
select {
case <-stop:
return
default:
// 第piece个节点被doWorkPiece了;
// 对应调用过程也就是checkNode函数传入了一个整型参数piece
doWorkPiece(piece)
}
}
}()
}
wg.Wait()
}
回想一下前面的checkNode := func(i int){……},上面的doWorkPiece(piece)也就是调用到了这里的这个匿名函数func(i int){……};到这里就清楚如何实现并发执行多个node的predicate过程了。
3. 一个node的predicate
checkNode的主要逻辑就是上面介绍的并发加上下面这个podFitsOnNode()函数逻辑:
pkg/scheduler/core/generic_scheduler.go:425
fits, failedPredicates, err := podFitsOnNode(
pod,
meta,
g.cachedNodeInfoMap[nodeName],
g.predicates,
nodeCache,
g.schedulingQueue,
g.alwaysCheckAllPredicates,
equivClass,
)
我们从podFitsOnNode()的函数定义入手:
pkg/scheduler/core/generic_scheduler.go:537
func podFitsOnNode(
pod *v1.Pod,
meta algorithm.PredicateMetadata,
info *schedulercache.NodeInfo,
predicateFuncs map[string]algorithm.FitPredicate,
nodeCache *equivalence.NodeCache,
queue internalqueue.SchedulingQueue,
alwaysCheckAllPredicates bool,
equivClass *equivalence.Class,
) (bool, []algorithm.PredicateFailureReason, error)
关于这个函数的逻辑,注释里的描述翻译过来大概是这个意思:
podFitsOnNode()函数检查一个通过NodeInfo形式给定的node是否满足指定的predicate functions. 对于给定的一个Pod,podFitsOnNode()函数会检查是否有某个“等价的pod”存在,然后重用那个等价pod缓存的predicate结果。 这个函数的调用入口有2处: Schedule and Preempt.
- 当从Schedule进入时:这个函数想要测试node上所有已经存在的pod外加被指定将要调度到这个node上的其他所有高优先级(优先级不比自己低,也就是>=)的pod后,当前pod是否可以被调度到这个node上。
- 当从Preempt进入时:后面讲preempt时再详细分析。
podFitsOnNode()函数的参数有点多,每个跟进去就是一堆知识点。这里建议大家从字面先过一边,然后跟进去看一下类型定义,类型的注释等,了解一下功能,先不深究。整体看完一边调度器代码后回过头深入细节。
我们一起看一下其中这个参数:predicateFuncs map[string]algorithm.FitPredicate;这里的predicateFuncs是一个map,表示所有的predicate函数。这个map的key是个字符串,也就是某种形式的name了;value类型跟进去看一下:
pkg/scheduler/algorithm/types.go:36
// FitPredicate is a function that indicates if a pod fits into an existing node.
// The failure information is given by the error.
type FitPredicate func(pod *v1.Pod, meta PredicateMetadata, nodeInfo *schedulercache.NodeInfo) (bool, []PredicateFailureReason, error)
FitPredicate是一个函数类型,3个参数,pod和node都很好理解,meta跟进去简单看一下可以发现定义的是一些和predicate相关的一些元数据,这些数据是根据pod和node信息获取到的,类似pod的端口有哪些,pod亲和的pod列表等。返回值是一个表示是否fit的bool值,predicate失败的原因列表,一个错误类型。
也就是说,FitPredicate这个函数类型也就是前面一直说的predicate functions的真面目了。下面看podFitsOnNode()函数的具体逻辑吧:
pkg/scheduler/core/generic_scheduler.go:537
func podFitsOnNode(
pod *v1.Pod,
meta algorithm.PredicateMetadata,
info *schedulercache.NodeInfo,
predicateFuncs map[string]algorithm.FitPredicate,
nodeCache *equivalence.NodeCache,
queue internalqueue.SchedulingQueue,
alwaysCheckAllPredicates bool,
equivClass *equivalence.Class,
) (bool, []algorithm.PredicateFailureReason, error) {
podsAdded := false
for i := 0; i < 2; i++ {
metaToUse := meta
nodeInfoToUse := info
if i == 0 {
podsAdded, metaToUse, nodeInfoToUse = addNominatedPods(pod, meta, info, queue)
} else if !podsAdded || len(failedPredicates) != 0 {
break
}
eCacheAvailable = equivClass != nil && nodeCache != nil && !podsAdded
// 这里省略一个for循环,下面会单独讲
}
return len(failedPredicates) == 0, failedPredicates, nil
}
这里的逻辑是从一个for循环开始的,关于这个2次循环的含义代码里有很长的一段注释,我们先看一下注释里怎么说的(这里可以多看几遍体会一下):
- 出于某些原因考虑我们需要运行两次predicate. 如果node上有更高或者相同优先级的“指定pods”(这里的“指定pods”指的是通过schedule计算后指定要跑在一个node上但是还未真正运行到那个node上的pods),我们将这些pods加入到meta和nodeInfo后执行一次计算过程。
- 如果这个过程所有的predicates都成功了,我们再假设这些“指定pods”不会跑到node上再运行一次。第二次计算是必须的,因为有一些predicates比如pod亲和性,也许在“指定pods”没有成功跑到node的情况下会不满足。
- 如果没有“指定pods”或者第一次计算过程失败了,那么第二次计算不会进行。
- 我们在第一次调度的时候只考虑相等或者更高优先级的pods,因为这些pod是当前pod必须“臣服”的,也就是说不能够从这些pod中抢到资源,这些pod不会被当前pod“抢占”;这样当前pod也就能够安心从低优先级的pod手里抢资源了。
- 新pod在上述2种情况下都可调度基于一个保守的假设:资源和pod反亲和性等的predicate在“指定pods”被处理为Running时更容易失败;pod亲和性在“指定pods”被处理为Not Running时更加容易失败。
- 我们不能假设“指定pods”是Running的因为它们当前还没有运行,而且事实上,它们确实有可能最终又被调度到其他node上了。
看了这个注释后,上面代码里的前几行就很好理解了,在第一次进入循环体和第二次进入时做了不同的处理,具体怎么做的处理我们暂时不关注。下面看省略的这个for循环做了啥:
pkg/scheduler/core/generic_scheduler.go:583
// predicates.Ordering()得到的是一个[]string,predicate名字集合
for predicateID, predicateKey := range predicates.Ordering() {
var (
fit bool
reasons []algorithm.PredicateFailureReason
err error
)
// 如果predicateFuncs有这个key,则调用这个predicate;也就是说predicateFuncs如果定义了一堆乱七八遭的名字,会被忽略调,因为predicateKey是内置的。
if predicate, exist := predicateFuncs[predicateKey]; exist {
// 降低难度,先不看缓存情况。
if eCacheAvailable {
fit, reasons, err = nodeCache.RunPredicate(predicate, predicateKey, predicateID, pod, metaToUse, nodeInfoToUse, equivClass)
} else {
// 真正调用predicate函数了!!!!!!!!!
fit, reasons, err = predicate(pod, metaToUse, nodeInfoToUse)
}
if err != nil {
return false, []algorithm.PredicateFailureReason{}, err
}
if !fit {
// ……
}
}
}
如上,我们看一下2个地方:
- predicates.Ordering()
- fit, reasons, err = predicate(pod, metaToUse, nodeInfoToUse)
分两个小节吧~
3.1. predicates的顺序
pkg/scheduler/algorithm/predicates/predicates.go:130
var (
predicatesOrdering = []string{
CheckNodeConditionPred,
CheckNodeUnschedulablePred,
GeneralPred,
HostNamePred,
PodFitsHostPortsPred,
MatchNodeSelectorPred,
PodFitsResourcesPred,
NoDiskConflictPred,
PodToleratesNodeTaintsPred,
PodToleratesNodeNoExecuteTaintsPred,
CheckNodeLabelPresencePred,
CheckServiceAffinityPred,
MaxEBSVolumeCountPred,
MaxGCEPDVolumeCountPred,
MaxCSIVolumeCountPred,
MaxAzureDiskVolumeCountPred,
CheckVolumeBindingPred,
NoVolumeZoneConflictPred,
CheckNodeMemoryPressurePred,
CheckNodePIDPressurePred,
CheckNodeDiskPressurePred,
MatchInterPodAffinityPred}
)
如上,这里定义了一个次序,前面的for循环遍历的是这个[]string,这样也就实现了不管predicateFuncs里定义了怎样的顺序,影响不了predicate的实际调用顺序。官网对于这个顺序有这样一个表格解释:
| Position | Predicate | comments (note, justification...) |
|---|---|---|
| 1 | CheckNodeConditionPredicate |
we really don’t want to check predicates against unschedulable nodes. |
| 2 | PodFitsHost |
we check the pod.spec.nodeName. |
| 3 | PodFitsHostPorts |
we check ports asked on the spec. |
| 4 | PodMatchNodeSelector |
check node label after narrowing search. |
| 5 | PodFitsResources |
this one comes here since it’s not restrictive enough as we do not try to match values but ranges. |
| 6 | NoDiskConflict |
Following the resource predicate, we check disk |
| 7 | PodToleratesNodeTaints |
check toleration here, as node might have toleration |
| 8 | PodToleratesNodeNoExecuteTaints |
check toleration here, as node might have toleration |
| 9 | CheckNodeLabelPresence |
labels are easy to check, so this one goes before |
| 10 | checkServiceAffinity |
- |
| 11 | MaxPDVolumeCountPredicate |
- |
| 12 | VolumeNodePredicate |
- |
| 13 | VolumeZonePredicate |
- |
| 14 | CheckNodeMemoryPressurePredicate |
doesn’t happen often |
| 15 | CheckNodeDiskPressurePredicate |
doesn’t happen often |
| 16 | InterPodAffinityMatches |
Most expensive predicate to compute |
这个表格大家对着字面意思体会一下吧,基本还是可以联想到意义的。
当然这个顺序是可以被配置文件覆盖的,用户可以使用类似这样的配置:
{
"kind" : "Policy",
"apiVersion" : "v1",
"predicates" : [
{"name" : "PodFitsHostPorts", "order": 2},
{"name" : "PodFitsResources", "order": 3},
{"name" : "NoDiskConflict", "order": 5},
{"name" : "PodToleratesNodeTaints", "order": 4},
{"name" : "MatchNodeSelector", "order": 6},
{"name" : "PodFitsHost", "order": 1}
],
"priorities" : [
{"name" : "LeastRequestedPriority", "weight" : 1},
{"name" : "BalancedResourceAllocation", "weight" : 1},
{"name" : "ServiceSpreadingPriority", "weight" : 1},
{"name" : "EqualPriority", "weight" : 1}
],
"hardPodAffinitySymmetricWeight" : 10
}
整体过完源码后我们再实际尝试一下这些特性,这一边先知道有这回事吧,ok,继续~
3.2. 单个predicate执行过程
fit, reasons, err = predicate(pod, metaToUse, nodeInfoToUse)
这行代码其实没有啥复杂逻辑,不过我们还是重复讲一下,清晰理解这一行很有必要。这里的predicate()来自前几行的if语句predicate, exist := predicateFuncs[predicateKey],往前跟也就是FitPredicate类型,我们前面提过,类型定义在pkg/scheduler/algorithm/types.go:36,这个߇#x7C7B;型表示的是一个具体的predicate函数,这里使用predicate()也就是一个函数调用的语法,很和谐了。
3.3. 具体的predicate函数
一直在讲predicate,那么predicate函数到底长什么样子呢,我们从具体的实现函数找一个看一下。开始讲design的时候提到过predicate的实现在pkg/scheduler/algorithm/predicates/predicates.go文件中,先看一眼Structure吧:
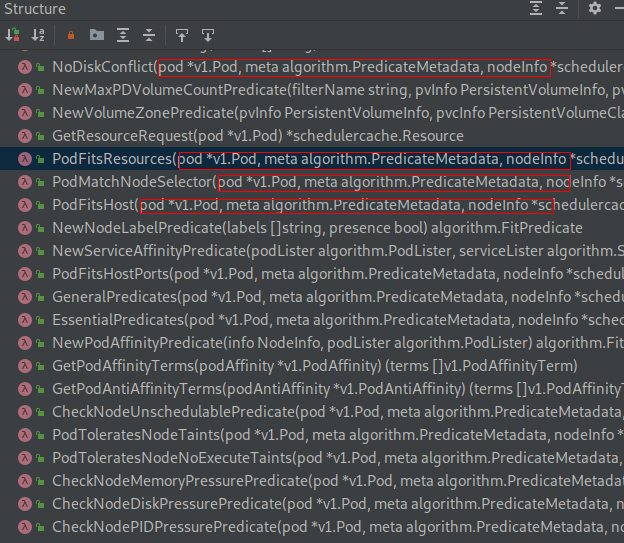
这个文件中predicate函数有点多,这样看眼花,我们具体点开一个观察一下:
pkg/scheduler/algorithm/predicates/predicates.go:277
func NoDiskConflict(pod *v1.Pod, meta algorithm.PredicateMetadata, nodeInfo *schedulercache.NodeInfo) (bool, []algorithm.PredicateFailureReason, error) {
for _, v := range pod.Spec.Volumes {
for _, ev := range nodeInfo.Pods() {
if isVolumeConflict(v, ev) {
return false, []algorithm.PredicateFailureReason{ErrDiskConflict}, nil
}
}
}
return true, nil, nil
}
我们知道predicate函数的特点,这样就很好在这个一千六百多行go文件中寻找predicate函数了。像上面这个NoDiskConflict()函数,参数是pod、meta和nodeinfo,很明显是FitPredicate类型的,标准的predicate函数。
这个函数的实现也特别简单,遍历pod的Volumes,然后对于pod的每一个Volume,遍历node上的每个pod,看是否和当前podVolume冲突。如果不fit就返回false加原因;如果fit就返回true,很清晰。