https://github.com/dusty-nv/jetson-inference/blob/master/docs/building-repo-2.md
Provided with the repo is a library of TensorRT-accelerated deep learning networks for image recognition, object detection with localization (i.e. bounding boxes), and semantic segmentation. This inferencing library (libjetson-inference) is intended to be built & run on the Jetson, and includes support for both C++ and Python.
Various pre-trained DNN models are automatically downloaded to get you up and running quickly. It's also setup to accept customized models that you may have trained yourself, including support for Caffe, TensorFlow UFF, and ONNX.
The latest source can be obtained from GitHub and compiled onboard Jetson Nano, Jetson TX1/TX2, and Jetson AGX Xavier once they have been flashed with JetPack or setup with the pre-populated SD card image for Jetson Nano.
Quick Reference
Here's a condensed form of the commands to download, build, and install the project:
$ sudo apt-get update
$ sudo apt-get install git cmake libpython3-dev python3-numpy
$ git clone --recursive https://github.com/dusty-nv/jetson-inference
$ cd jetson-inference
$ mkdir build
$ cd build
$ cmake ../
$ make
$ sudo make install
$ sudo ldconfig
Below we will go through each step and discuss various build options along the way.
Cloning the Repo
To download the code, navigate to a folder of your choosing on the Jetson. First, make sure git and cmake are installed:
$ sudo apt-get update
$ sudo apt-get install git cmake
Then clone the jetson-inference project:
$ git clone https://github.com/dusty-nv/jetson-inference
$ cd jetson-inference
$ git submodule update --init
Remember to run the git submodule update --init step (or clone with the --recursive flag).
Python Development Packages
The Python functionality of this project is implemented through Python extension modules that provide bindings to the native C++ code using the Python C API. While configuring the project, the repo searches for versions of Python that have development packages installed on the system, and will then build the bindings for each version of Python that's present (e.g. Python 2.7, 3.6, and 3.7). It will also build numpy bindings for versions of numpy that are installed.
By default, Ubuntu comes with the libpython-dev and python-numpy packages pre-installed (which are for Python 2.7). Although the Python 3.6 interpreter is pre-installed by Ubuntu, the Python 3.6 development packages (libpython3-dev) and python3-numpy are not. These development packages are required for the bindings to build using the Python C API.
So if you want the project to create bindings for Python 3.6, install these packages before proceeding:
$ sudo apt-get install libpython3-dev python3-numpy
Installing these additional packages will enable the repo to build the extension bindings for Python 3.6, in addition to Python 2.7 (which is already pre-installed). Then after the build process, the jetson.inference and jetson.utilspackages will be available to use within your Python environments.
Configuring with CMake
Next, create a build directory within the project and run cmake to configure the build. When cmake is run, a script is launched (CMakePreBuild.sh) that will install any required dependencies and download DNN models for you.
$ cd jetson-inference # omit if working directory is already jetson-inference/ from above
$ mkdir build
$ cd build
$ cmake ../
note: this command will launch the
CMakePreBuild.shscript which asks for sudo privileges while installing some prerequisite packages on the Jetson. The script also downloads pre-trained networks from web services.
Downloading Models
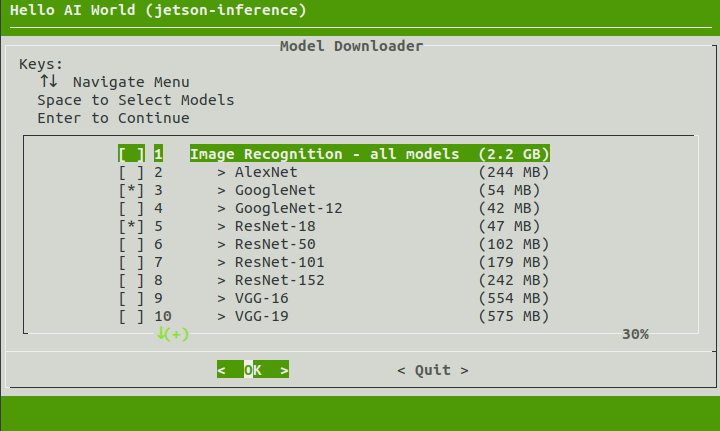
The project comes with many pre-trained networks that can you can choose to have downloaded and installed through the Model Downloader tool (download-models.sh). By default, not all of the models are initially selected for download to save disk space. You can select the models you want, or run the tool again later to download more models another time.
When initially configuring the project, cmake will automatically run the downloader tool for you:
note: for users that are unable to connect to Box.com to download the models, a mirror is provided here:
https://github.com/dusty-nv/jetson-inference/releases
To run the Model Downloader tool again later, you can use the following commands:
$ cd jetson-inference/tools
$ ./download-models.sh
Installing PyTorch
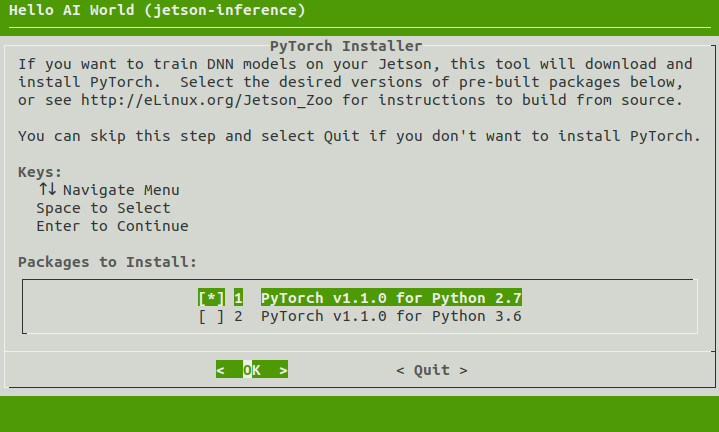
If you are using JetPack 4.2 or newer, another tool will now run that can optionally install PyTorch on your Jetson if you want to re-train networks with transfer learning later in the tutorial. This step is optional, and if you don't wish to do the transfer learning steps, you don't need to install PyTorch and can skip this step.
If desired, select the PyTorch package versions for Python 2.7 and/or Python 3.6 that you want installed and hit Enter to continue. Otherwise, leave the options un-selected, and it will skip the installation of PyTorch.
note: the automated PyTorch installation tool requires JetPack 4.2 (or newer)
for other versions, seehttp://eLinux.org/Jetson_Zooto build from source.
You can also run this tool again later if you decide that you want to install PyTorch at another time:
$ cd jetson-inference/build
$ ./install-pytorch.sh
Running these commands will prompt you with the same dialog as seen above.
Compiling the Project
Make sure you are still in the jetson-inference/build directory, created above in step #3.
Then run make followed by sudo make install to build the libraries, Python extension bindings, and code samples:
$ cd jetson-inference/build # omit if working directory is already build/ from above
$ make
$ sudo make install
$ sudo ldconfig
The project will be built to jetson-inference/build/aarch64, with the following directory structure:
|-build
aarch64
in where the sample binaries are built to
etworks where the network models are stored
images where the test images are stored
include where the headers reside
lib where the libraries are build to
In the build tree, you can find the binaries residing in build/aarch64/bin/, headers in build/aarch64/include/, and libraries in build/aarch64/lib/. These also get installed under /usr/local/ during the sudo make install step.
The Python bindings for the jetson.inference and jetson.utils modules also get installed during the sudo make install step under /usr/lib/python*/dist-packages/. If you update the code, remember to run it again.
Digging Into the Code
See the API Reference documentation for the vision primitives available in libjetson-inference, including imageNet for image recognition, detectNet for object localization, and segNet for semantic segmentation. Familiarize yourself with the C++ or Python versions of these objects, depending on which language you prefer to use.
C++
Below is a partial listing of the imageNet C++ class that we'll use in upcoming steps of the tutorial:
class imageNet : public tensorNet
{
public:
/**
* Network choice enumeration.
*/
enum NetworkType
{
CUSTOM, /**< Custom model provided by the user */
ALEXNET, /**< AlexNet trained on 1000-class ILSVRC12 */
GOOGLENET, /**< GoogleNet trained 1000-class ILSVRC12 */
GOOGLENET_12, /**< GoogleNet trained on 12-class subset of ImageNet ILSVRC12 from the tutorial */
RESNET_18, /**< ResNet-18 trained on 1000-class ILSVRC15 */
RESNET_50, /**< ResNet-50 trained on 1000-class ILSVRC15 */
RESNET_101, /**< ResNet-101 trained on 1000-class ILSVRC15 */
RESNET_152, /**< ResNet-50 trained on 1000-class ILSVRC15 */
VGG_16, /**< VGG-16 trained on 1000-class ILSVRC14 */
VGG_19, /**< VGG-19 trained on 1000-class ILSVRC14 */
INCEPTION_V4, /**< Inception-v4 trained on 1000-class ILSVRC12 */
};
/**
* Load a new network instance
*/
static imageNet* Create( NetworkType networkType=GOOGLENET, uint32_t maxBatchSize=DEFAULT_MAX_BATCH_SIZE,
precisionType precision=TYPE_FASTEST,
deviceType device=DEVICE_GPU, bool allowGPUFallback=true );
/**
* Load a new network instance
* @param prototxt_path File path to the deployable network prototxt
* @param model_path File path to the caffemodel
* @param mean_binary File path to the mean value binary proto (can be NULL)
* @param class_labels File path to list of class name labels
* @param input Name of the input layer blob.
* @param output Name of the output layer blob.
* @param maxBatchSize The maximum batch size that the network will support and be optimized for.
*/
static imageNet* Create( const char* prototxt_path, const char* model_path,
const char* mean_binary, const char* class_labels,
const char* input=IMAGENET_DEFAULT_INPUT,
const char* output=IMAGENET_DEFAULT_OUTPUT,
uint32_t maxBatchSize=DEFAULT_MAX_BATCH_SIZE,
precisionType precision=TYPE_FASTEST,
deviceType device=DEVICE_GPU, bool allowGPUFallback=true );
/**
* Determine the maximum likelihood image class.
* This function performs pre-processing to the image (apply mean-value subtraction and NCHW format), @see PreProcess()
* @param rgba float4 input image in CUDA device memory.
* @param width width of the input image in pixels.
* @param height height of the input image in pixels.
* @param confidence optional pointer to float filled with confidence value.
* @returns Index of the maximum class, or -1 on error.
*/
int Classify( float* rgba, uint32_t width, uint32_t height, float* confidence=NULL );
/**
* Retrieve the number of image recognition classes (typically 1000)
*/
inline uint32_t GetNumClasses() const { return mOutputClasses; }
/**
* Retrieve the description of a particular class.
*/
inline const char* GetClassDesc( uint32_t index ) const { return mClassDesc[index].c_str(); }
};
All of the DNN objects in the repo inherit from the shared tensorNet object, which contains the common TensorRT code.
Python
Below is the abbreviated pydoc output of the Python imageNet object from the jetson.inference package:
jetson.inference.imageNet = class imageNet(tensorNet)
| Image Recognition DNN - classifies an image
|
| __init__(...)
| Loads an image recognition model.
|
| Parameters:
| network (string) -- name of a built-in network to use
| values can be: 'alexnet', 'googlenet', 'googlenet-12', 'resnet-18`, ect.
| the default is 'googlenet'
|
| argv (strings) -- command line arguments passed to imageNet,
| for loading a custom model or custom settings
|
| Classify(...)
| Classify an RGBA image and return the object's class and confidence.
|
| Parameters:
| image (capsule) -- CUDA memory capsule
| width (int) -- width of the image (in pixels)
| height (int) -- height of the image (in pixels)
|
| Returns:
| (int, float) -- tuple containing the object's class index and confidence
|
| GetClassDesc(...)
| Return the class description for the given object class.
|
| Parameters:
| (int) -- index of the class, between [0, GetNumClasses()]
|
| Returns:
| (string) -- the text description of the object class
|
| GetNumClasses(...)
| Return the number of object classes that this network model is able to classify.
|
| Parameters: (none)
|
| Returns:
| (int) -- number of object classes that the model supports
----------------------------------------------------------------------
Next, we'll use the imageNet object to perform image recognition in Python or C++.