RCNN(Regions with CNN features)是RGB在2014年提出的一种目标检测算法,RCNN是将CNN方法应用道目标检测问题上的一个里程碑,借助CNN良好的特征提取和分类性能,通过RegionProposal方法实现目标检测。
前面我们提到的滑动窗口法可以得到目标所在区域,但会产生大量的计算。除了滑动窗口法之外还有另外一类基于区域(regionProposal)的方法,select search就是其中之一。
selective search
step1 计算区域集R里每个相邻区域的相似度s = {s1,s2,。。。}
step2 找出相似度最高的两个区域,将其合并为新集Rt,添加进R
step3 从S中移除所有与step2中有关的子集
step4 重新计算新集Rt与所有子集的相似度
这里相似度主要考虑颜色,纹理,chicun,交叠四个方面
算法流程:
1)选择1个分类模型(比如AlexNet,VGGNet等)
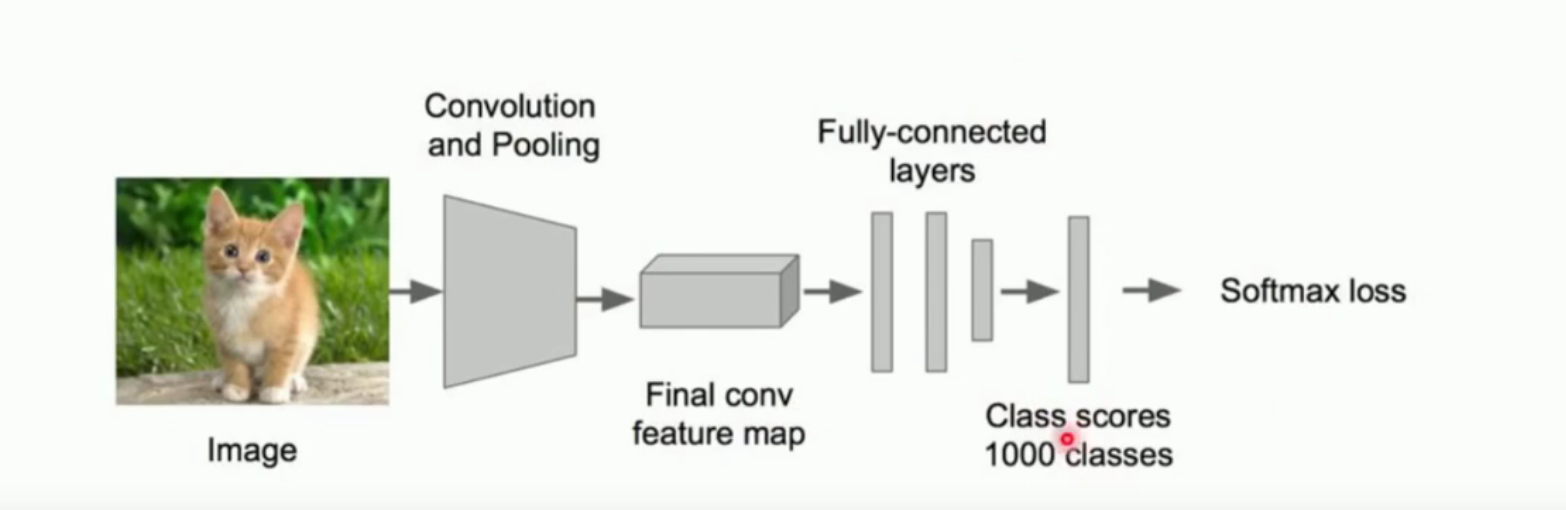
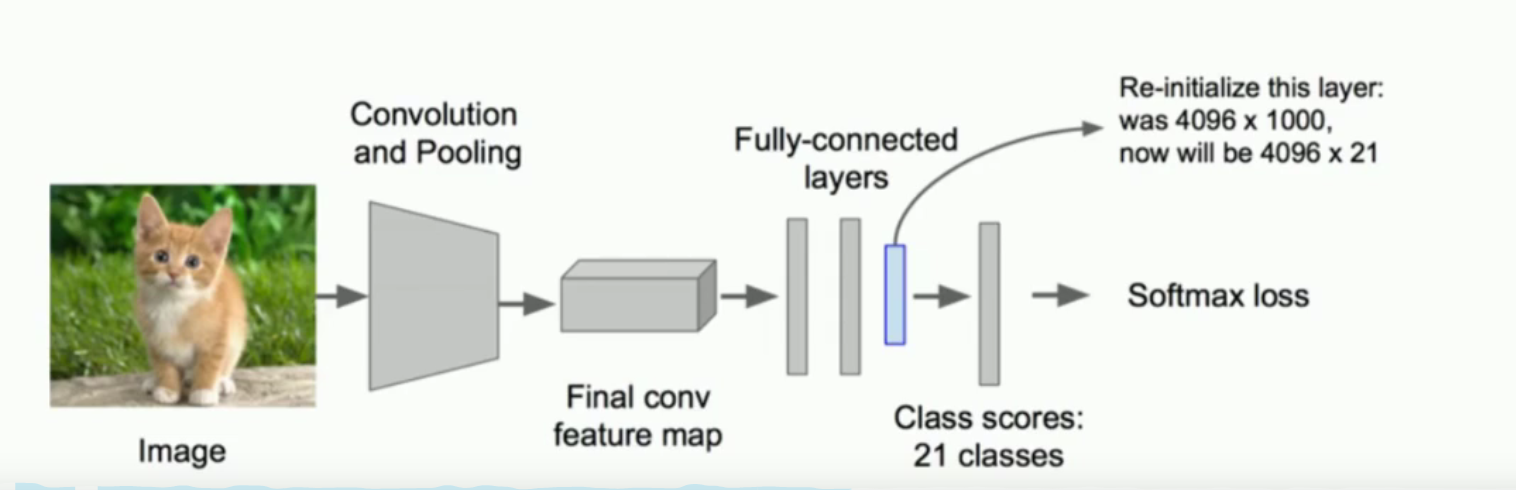
2)去掉最后一个全连接层(主要要改变分类数)
将分类数改为N(该目标分类)+1(背景)对于ILSVRC2013,分类数为200
对该模型做fine-turning(主要是优化卷积层和池化层的参数)也包括BN操作中的缩放因子γ和偏置因子β
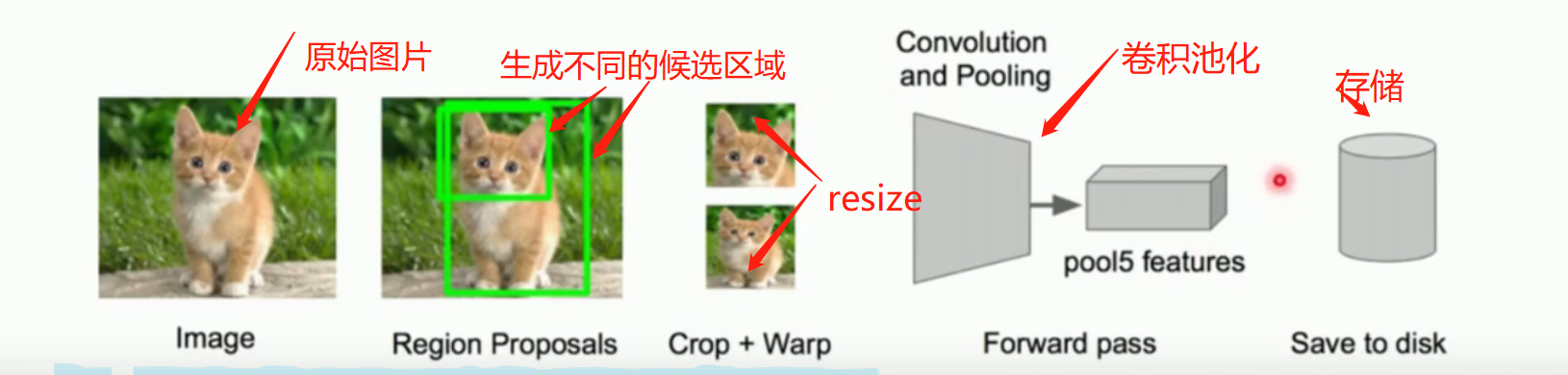
3)论文中用(vgg16)到的网络pool5后面是一层fc6全连接层。
对每个候选区域进行特征提取:
Resize区域大小,然后做一次前向运算,将第5个池化层输出保存到硬盘
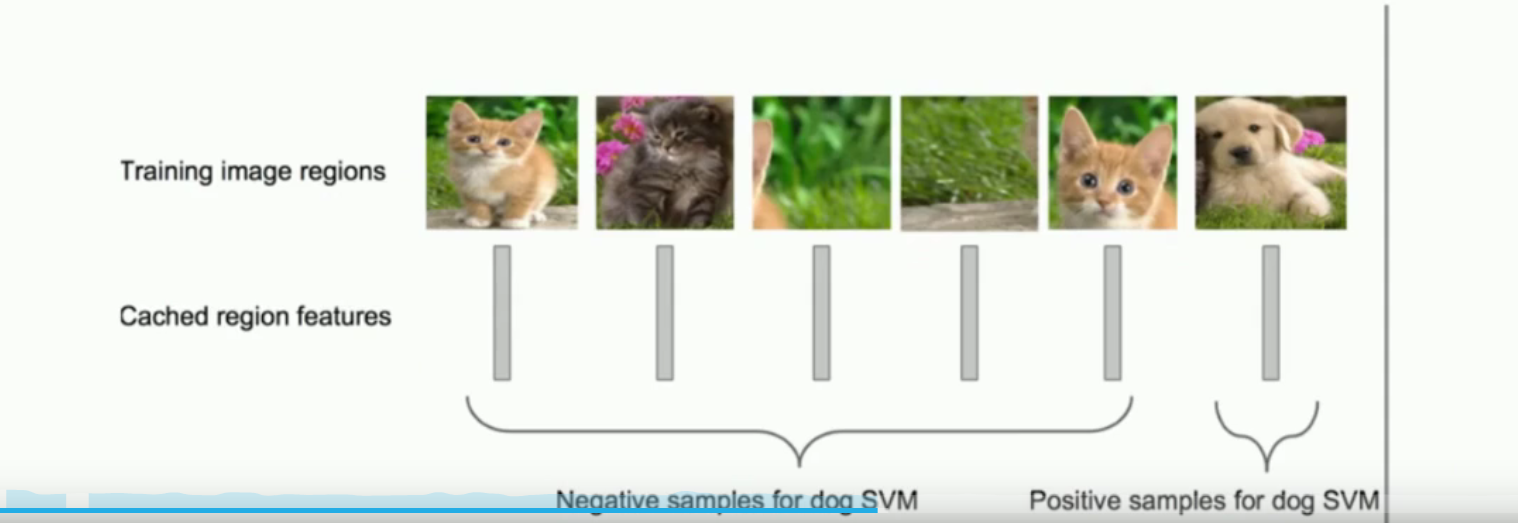
4)训练阶段:
使用pool5输出的图像特征训练svm分类器(二分类)来判断这个候选框里面的物体类别。
测试阶段:
每个类别对应一个svm,判断是不是属于这个类别,下面是svm
5)训练阶段:
使用pool5输出的图像特征训练回归器(dx,dy,dw,dh)
dx表示水平平移,dy表示垂直平移,dw表示水平缩放,dh表示高度缩放
如何判断候选区域为好的框,计算候选框与真实框之间的IoU,当Iou大于一定阈值,则为真
测试阶段使用回归器调整候选框大小。