概述:西门子V90伺服
伺服参数设置:



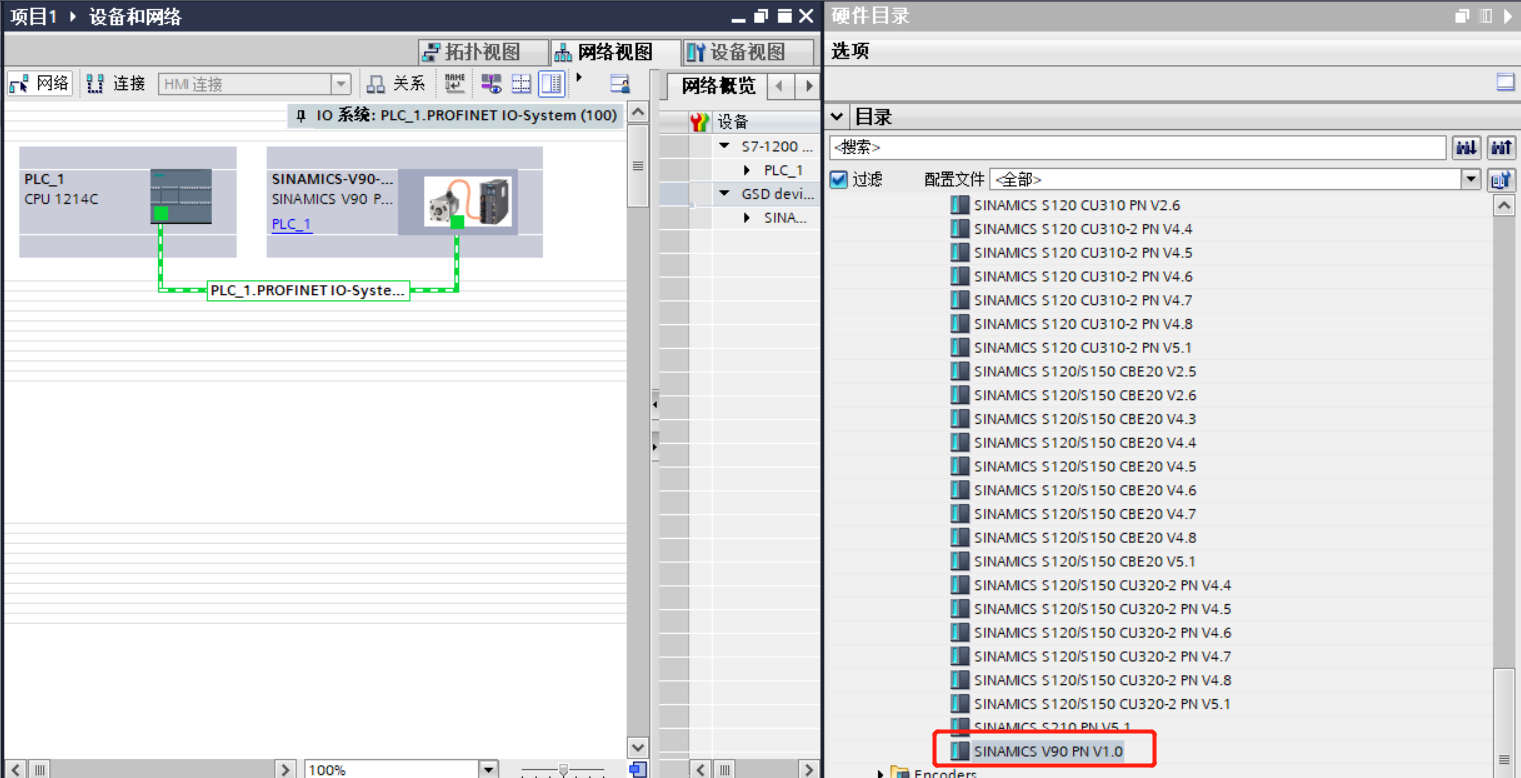
1,新建项目,添加1214C(DC/DC/DC)PLC,添加新子网,IP设为10.10.56.10;

2,添加V90伺服,拖入网络视图界面;
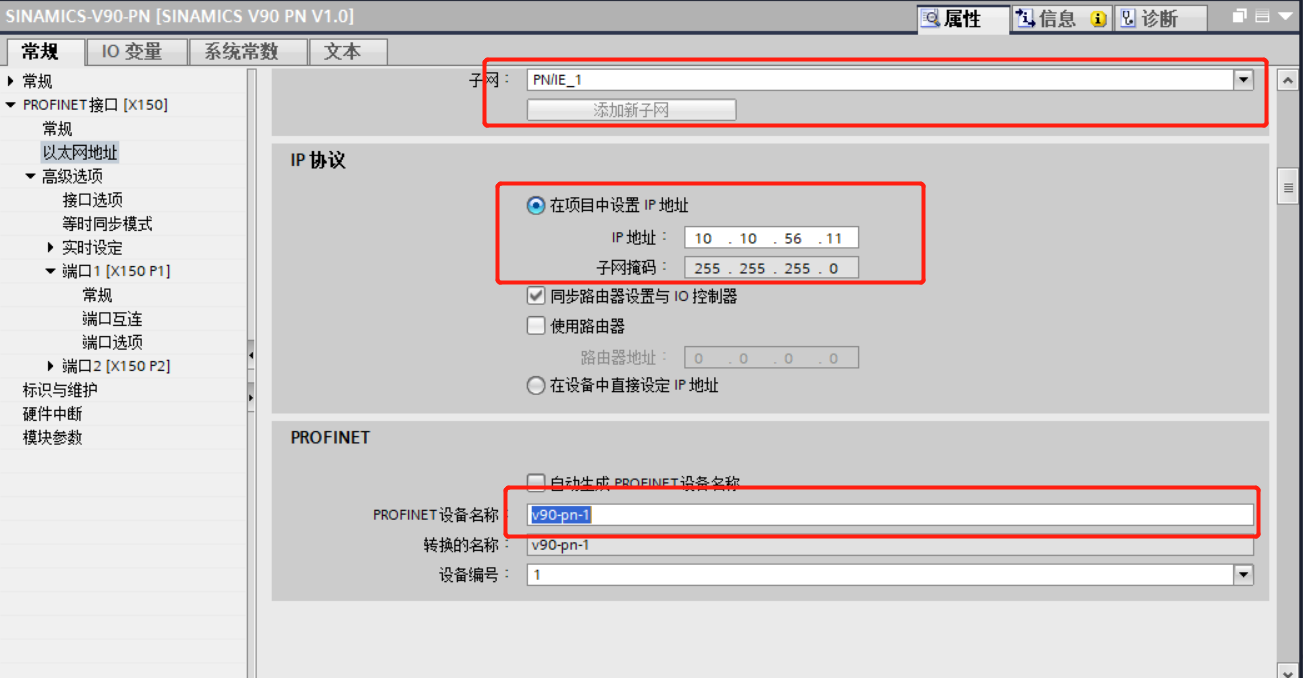
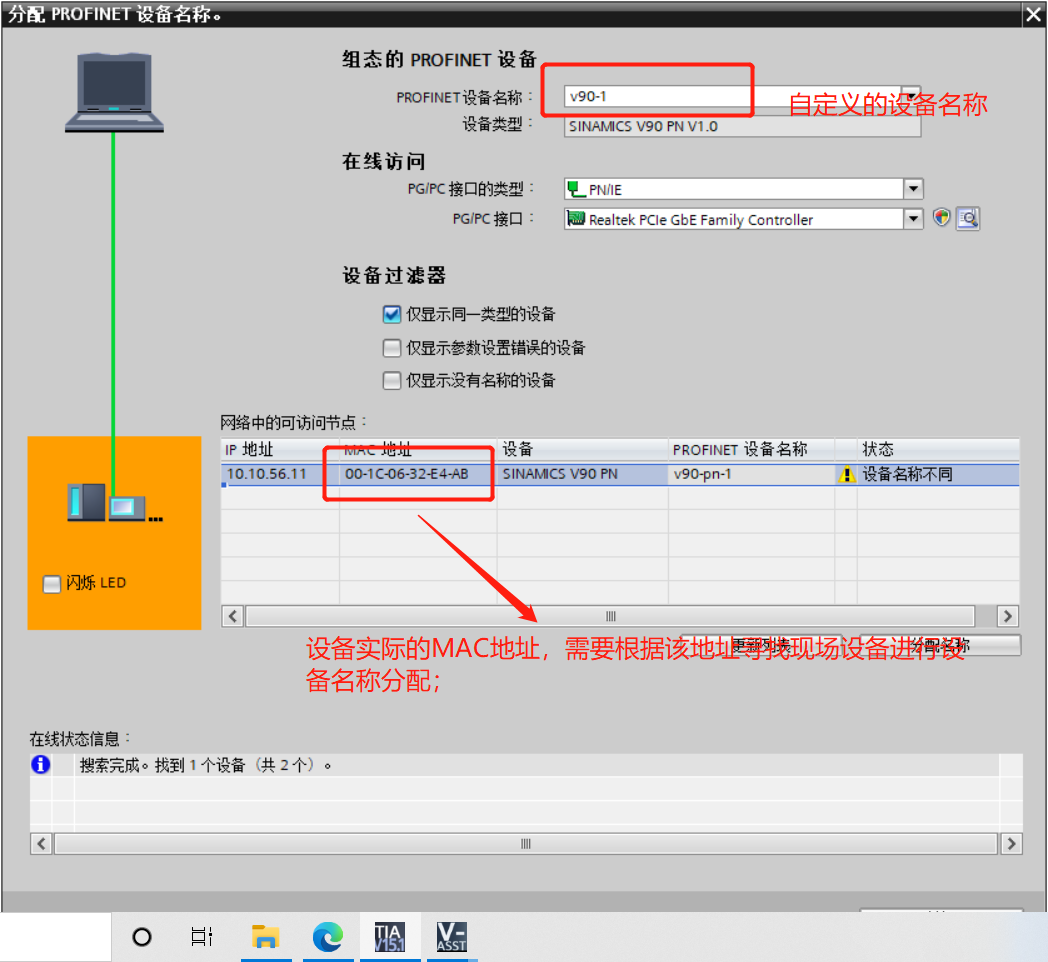
3,双击伺服网络端口,设置IP地址位10.10.56.11;设置设备名称位v90-pn-1;设备名称根据用户自己的需求更改即可;
 4,打开v90设备概况,从右侧拖入西门子报文111;
4,打开v90设备概况,从右侧拖入西门子报文111;

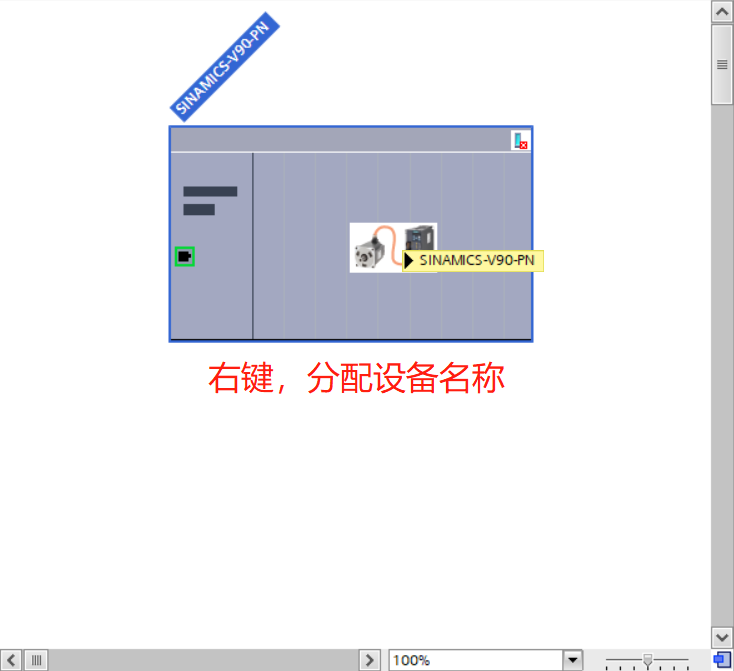
将程序下载至PLC,然后分配伺服设备名称;不分配的话会报设备组件错误;
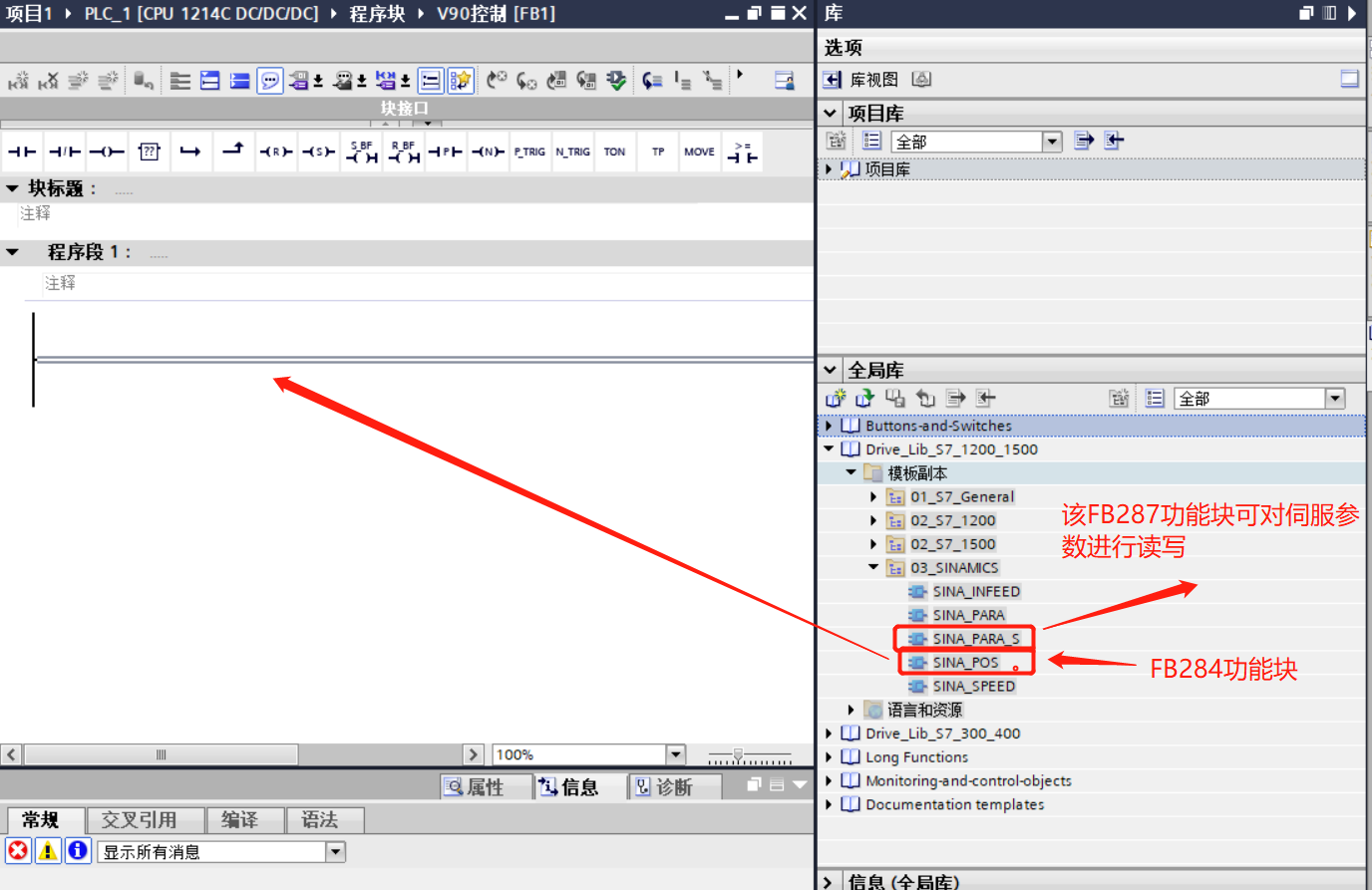
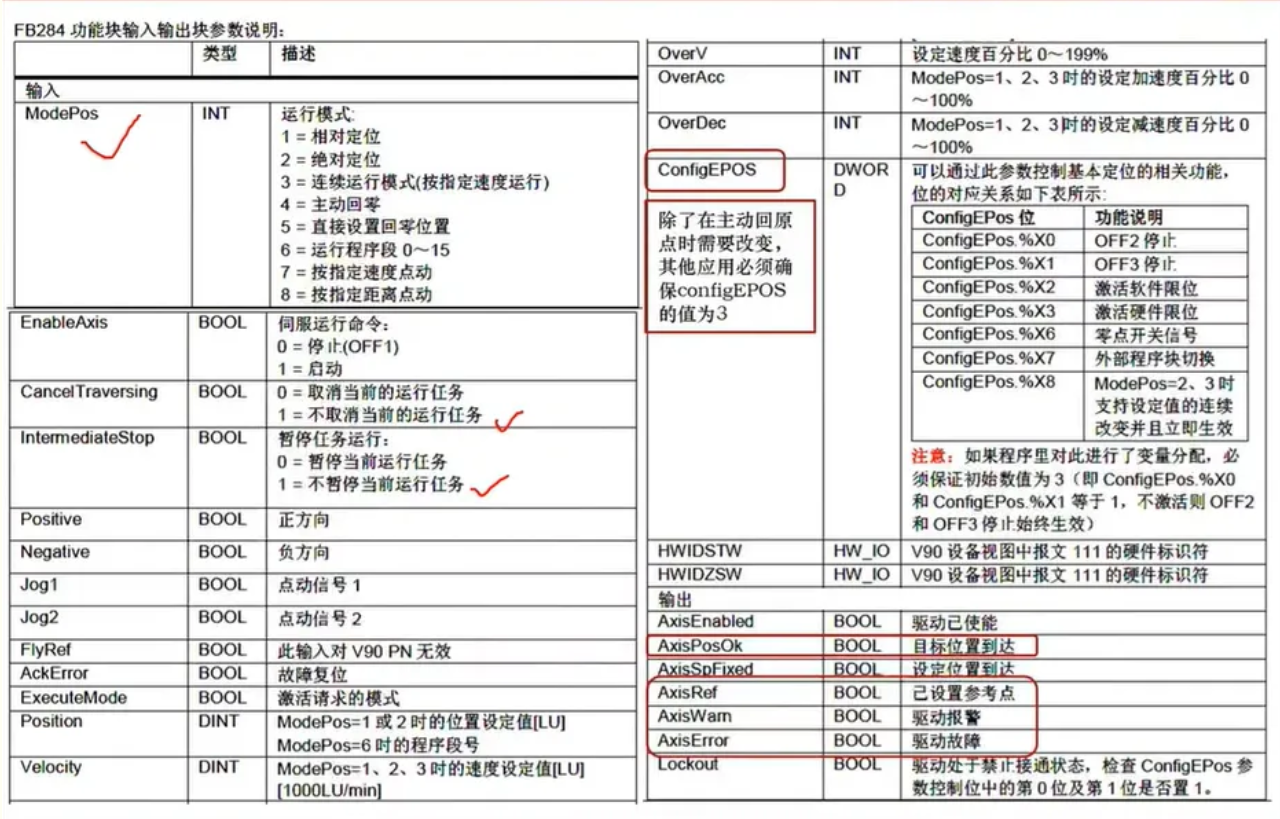
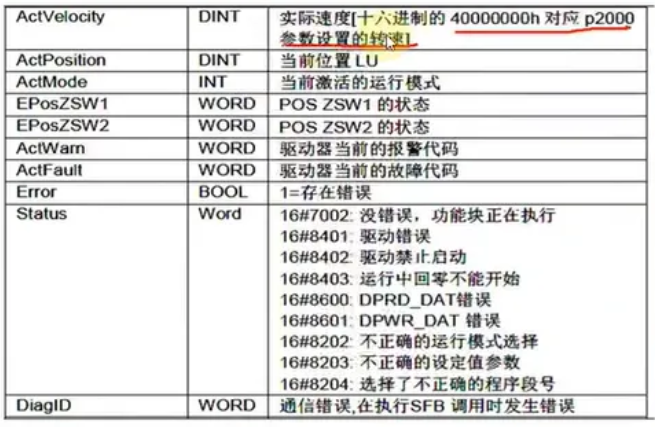
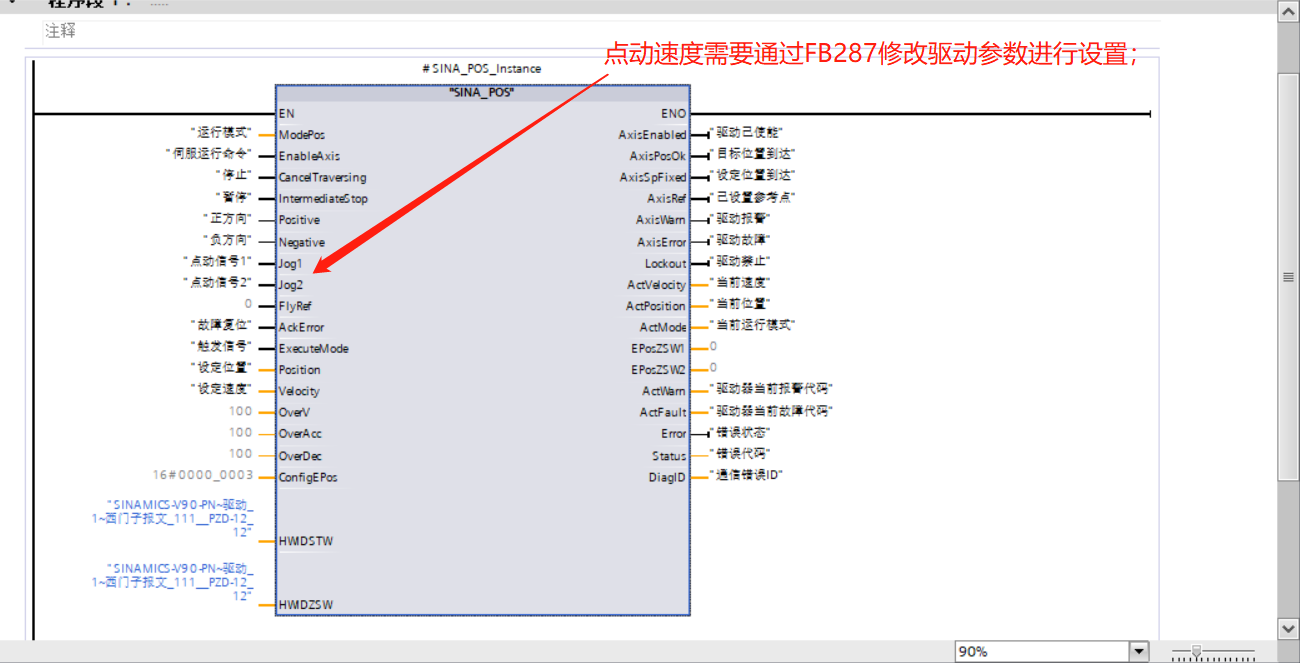
注意:回参考点时,ExecuteMode不是上升沿触发,而是要常ON;点动速度,回原方式等参数需要通过修改驱动器参数实现(或者通过FB287);
通过FB284回原时,正限位和负限位只能接在驱动器上,零点信号可以接在PLC上也可以接在伺服上(通过ConfigEPOS映射);