目标检测中常用到NMS,在faster R-CNN中,每一个bounding box都有一个打分,NMS实现逻辑是:
1,按打分最高到最低将BBox排序 ,例如:A B C D E F
2,A的分数最高,保留。从B-E与A分别求重叠率IoU,假设B、D与A的IoU大于阈值,那么B和D可以认为是重复标记去除
3,余下C E F,重复前面两步。
源码如下:
#coding:utf-8 import numpy as np def py_cpu_nms(dets, thresh): """Pure Python NMS baseline.""" x1 = dets[:, 0] y1 = dets[:, 1] x2 = dets[:, 2] y2 = dets[:, 3] scores = dets[:, 4] #bbox打分 areas = (x2 - x1 + 1) * (y2 - y1 + 1) #打分从大到小排列,取index order = scores.argsort()[::-1] #keep为最后保留的边框 keep = [] while order.size > 0: #order[0]是当前分数最大的窗口,肯定保留 i = order[0] keep.append(i) #计算窗口i与其他所有窗口的交叠部分的面积 xx1 = np.maximum(x1[i], x1[order[1:]]) yy1 = np.maximum(y1[i], y1[order[1:]]) xx2 = np.minimum(x2[i], x2[order[1:]]) yy2 = np.minimum(y2[i], y2[order[1:]]) w = np.maximum(0.0, xx2 - xx1 + 1) h = np.maximum(0.0, yy2 - yy1 + 1) inter = w * h #交/并得到iou值 ovr = inter / (areas[i] + areas[order[1:]] - inter) #inds为所有与窗口i的iou值小于threshold值的窗口的index,其他窗口此次都被窗口i吸收 inds = np.where(ovr <= thresh)[0] #order里面只保留与窗口i交叠面积小于threshold的那些窗口,由于ovr长度比order长度少1(不包含i),所以inds+1对应到保留的窗口 order = order[inds + 1] return keep
下面是我从网上copy下来的简单实现代码:
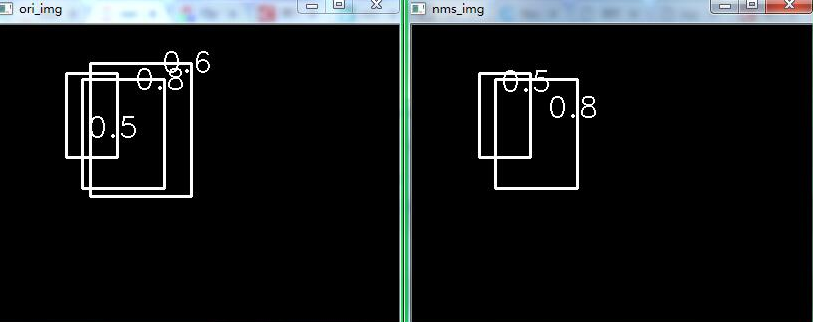
import cv2 import numpy as np import random img=np.zeros((300,400), np.uint8) dets=np.array([[83,54,165,163,0.8], [67,48,118,132,0.5], [91,38,192,171,0.6]], np.float) img_cp=img.copy() for box in dets.tolist(): #显示待测试框及置信度 x1,y1,x2,y2,score=int(box[0]),int(box[1]),int(box[2]),int(box[3]),box[-1] y_text=int(random.uniform(y1, y2)) cv2.rectangle(img_cp, (x1,y1), (x2, y2), (255, 255, 255), 2) cv2.putText(img_cp, str(score), (x2-30, y_text), 2,1, (255, 255, 0)) cv2.imshow("ori_img", img_cp) rtn_box=nms(dets, 0.3) #0.3为faster-rcnn中配置文件的默认值 cls_dets=dets[rtn_box, :] print "nms box:", cls_dets img_cp=img.copy() for box in cls_dets.tolist(): x1,y1,x2,y2,score=int(box[0]),int(box[1]),int(box[2]),int(box[3]),box[-1] y_text=int(random.uniform(y1, y2)) cv2.rectangle(img_cp, (x1,y1), (x2, y2), (255, 255, 255), 2) cv2.putText(img_cp, str(score), (x2-30, y_text), 2,1, (255, 255, 0))