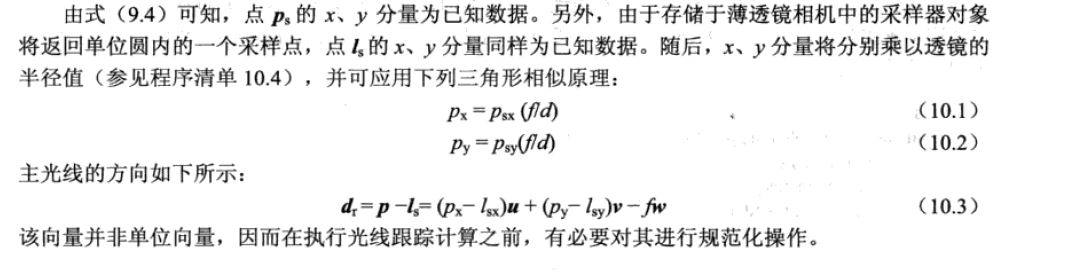
Thinhole类说白了就是在眼睛处,放一个放大镜。就像我们平时用放大镜观察物体一样。这样实现的效果的是,周围会模糊。原理书上都说的很清楚了,我把算法截图下来了。这个应用我猜测是在竞技游戏比如csgo中,狙击开镜后效果。具体等之后开发游戏时,再测试一下。如下:
类声明:
#pragma once
#ifndef __THINLENS_HEADER__
#define __THINLENS_HEADER__
#include "camera.h"
class Sampler;
class Thinlens :public Camera {
public:
Thinlens();
~Thinlens();
Thinlens(const Thinlens& tl);
void set_view_distance(const ldouble a);
void set_focal_distance(const ldouble a);//这个是放大镜的系数,我默认是取0.8,因为我用的物体是1个像素,比较小。
void set_lens_radius(const ldouble rad);//放大镜的半径
void set_zoom(const ldouble factor);//缩放
void set_angle(const ldouble deg);//旋转角
void set_sampler(Sampler* const sampler);//随机采样数组,实现模糊效果
Vector3 ray_direction(const Point3& pixel_point, const Point3& lens_point) const;
virtual Camera* clone() const;
virtual void render_scene(World& w);
Thinlens& operator=(const Thinlens& tl);
private:
ldouble lens_radius, d, f, zoom;
Sampler* sampler;
};
#endif
类实现
#include "pch.h"
#include "thinlens.h"
#include "../utilities/world.h"
#include "../utilities/viewplane.h"
#include "../samplers/sampler.h"
#include "../tracers/tracer.h"
Thinlens::Thinlens()
:Camera(), lens_radius(0.5), f(0.8), d(1), zoom(1), sampler(nullptr) {}
Thinlens::~Thinlens() {
if (sampler)
delete sampler;
}
Thinlens::Thinlens(const Thinlens& tl)
:Camera(tl), lens_radius(tl.lens_radius), f(tl.f), d(tl.d)
, zoom(tl.zoom), sampler(tl.sampler) {}
void Thinlens::set_view_distance(const ldouble a) {
d = a;
}
void Thinlens::set_focal_distance(const ldouble a) {
f = a;
}
void Thinlens::set_lens_radius(const ldouble rad) {
lens_radius = rad;
}
void Thinlens::set_zoom(const ldouble factor) {
zoom = factor;
}
void Thinlens::set_angle(const ldouble deg) {
ldouble rad = radian(deg);
up = Point3(std::cos(rad) * up.x - std::sin(rad) * up.y,
std::sin(rad) * up.x + std::cos(rad) * up.y, up.z);
}
void Thinlens::set_sampler(Sampler* const sam) {
if (sampler) {
delete sampler;
sampler = nullptr;
}
sampler = sam;
sampler->map_to_unit_disk();
}
Vector3 Thinlens::ray_direction(const Point3& pixel_point, const Point3& lens_point) const {
Point3 p;
p.x = pixel_point.x * d * f;
p.y = pixel_point.y * d * f;
Vector3 dir = (p.x - lens_point.x) * u + (p.y - lens_point.y) * v - f * w;
dir.normalize();
return dir;
}
Camera* Thinlens::clone() const {
return new Thinlens(*this);
}
void Thinlens::render_scene(World& w) {
Ray ray;
ViewPlane vp(w.vp);
integer depth = 0;
Point3 sp, pp, lp;
w.open_window(vp.hres, vp.vres);
vp.s = 1 / (vp.s * zoom);
for (integer r = vp.vres - 1; r >= 0; r--)//render from left-corner to right-corner
for (integer c = 0; c < vp.hres; c++) {
RGBColor color;
for (integer p = 0; p < vp.nsamples; p++) {
sp = vp.sampler->sample_unit_square();
pp.x = (c - 0.5 * vp.hres + sp.x) * vp.s;
pp.y = (r - 0.5 * vp.vres + sp.y) * vp.s;
lp = sampler->sample_unit_square() * lens_radius;
ray.o = eye + lp.x * u + lp.y * v;
ray.d = ray_direction(pp, lp);
color += w.tracer_ptr->trace_ray(ray);
}
color /= vp.nsamples;
color *= exposure_time;
w.display_pixel(r, c, color);
}
}
Thinlens& Thinlens::operator=(const Thinlens& tl) {
if (this == &tl)
return *this;
Camera::operator= (tl);
lens_radius = tl.lens_radius;
d = tl.d;
f = tl.f;
zoom = tl.zoom;
sampler = tl.sampler;
return *this;
}
需要修改的World类:
void World::build() {
vp.set_hres(200);
vp.set_vres(100);
vp.set_sampler(new Hammersley());
vp.sampler->map_to_sphere();
tracer_ptr = new MultiSphere(this);
Geometrics* obj = new Sphere(0, 0.5);
obj->set_color(RGBColor(1, 0, 0));
add_object(obj);
obj = new Sphere(Point3(0, -100.5, 0), 100);
obj->set_color(RGBColor(0, 0, 1));
add_object(obj);
Thinlens* thinlens = new Thinlens();
thinlens->set_eye(Point3(0, 0, 1));
thinlens->set_lookat(Point3(0));
thinlens->set_view_distance(1.5);
thinlens->set_sampler(new MultiJittered());//书上是采用多重采样,可以替换为其他采样。不过这个采样效果是比较好的。
thinlens->set_angle(-45);
//thinlens->set_zoom(2.0);
thinlens->compute_uvw();
set_camera(thinlens);
}
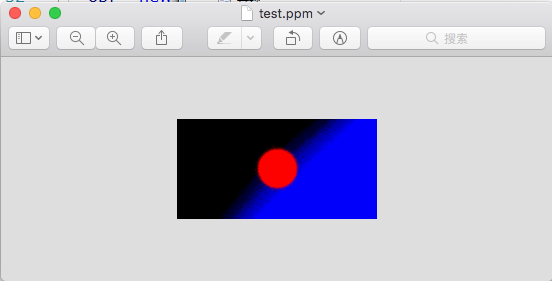
测试效果图(蓝色和黑色部分已经模糊了,算法测试成功!):