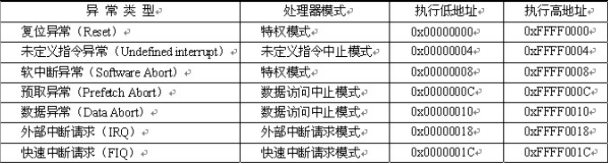
ARM处理器中有7种类型的异常,按优先级从高到低的排列如下:
复位异常(Reset)、
数据异常(Data Abort)、
快速中断异常(FIQ)、
外部中断异常(IRQ)、
预取异常(Prefetch Abort)、
软件中断(SWI)、
未定义指令异常(Undefined instruction)。
ARM异常优先级:

(1)当发生各种异常时,CPU会进入对应的工作模式,并跳转到它的异常向量处进行执行程序,那么这一步骤我们可以在汇编文件中进行配置:
异常向量:在0x00,0x04...处的指令称为异常向量
.text
.global _start
_start:
@0x00复位异常
b reset
@0x04未定义指令终止异常
undefined_interrupt:
b undefined_interrupt
@0x08软中断异常
software_abort:
b software_abort
@0x0c预取异常
prefetch_abort:
b prefetch_abort
@0x10数据异常
data_abort:
b data_abort
@0x14保留
notused:
b notused
@0x18外部中断
handle_iqr:
b handle_iqr
@0x1c快速中断
handle_fqr:
b handle_fqr
(2)当上电或复位时,CPU进入svr模式,进入复位异常并跳转到地址0x00处进行执行程序:
当复位异常时,系统执行下列伪操作:
R14_svc = UNPREDICTABLE value //任意值
SPSR_svc = UNPREDICTABLE value //任意值
CPSR[4∶0] = 0b10011 /*进入管理模式*/
CPSR[5] = 0 /*处理器进入ARM状态*/
CPSR[6] = 1 /*禁止快速中断*/
CPSR[7] = 1 /*禁止外设中断*/
If high vectors configured then
PC = 0xffff0000
Else
PC = 0x00000000
复位异常中断处理程序的主要功能:
*设置异常中断向量表。
*初始化数据栈和寄存器。
*初始化存储系统,如系统中的MMU等。
*初始化关键的I/O设备。
*使能中断。
*处理器切换到合适的模式。
*初始化C变量,跳转到应用程序执行。
reset: ldr sp,=4096 //设置栈 bl disable_watch_dog //关闭看门狗 msr cpsr_c, #0xd2 // ldr sp, =3072 //(在复位异常中提前设置中断模式的栈指针,防止中断触发时栈指针未设置而系统崩溃)
msr cpsr_c, #0xd3 //0xd3--11010011b
ldr sp, =4096 //进入管理模式,设置栈指针
bl init_led //初始化led的gpio管脚
bl init_irq //初始化中断
msr cpsr_c, #0x53 //使能IRQ中断0x53--01010011
ldr lr, =halt_loop //设置返回地址
ldr pc, =main //调用main函数
halt_loop:
b halt_loop
关于当前程序状态寄存器CPSR及msr,mrs汇编指令的知识:
1)CPSR寄存器
ARM每种工作模式除R0~R15共16个寄存器外,还有第17个寄存器CPSR,CPSR中一些位被用于标识各种状态,一些位被用于标识当前出于什么工作模式
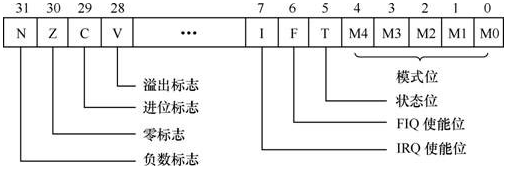
如上图所示,它的CPU状态位=> T位=0 --ARM状态
=1 --Thumb状态
它的中断禁止或使能位=> I和F位=0 --使能
=1 --禁止
它的M[4:0]位=> xxxxx,通过编写它可以使得CPU进入相应的工作模式

它的条件码标志位:N、Z、C、V--它们的内容可被算术或逻辑运算的结果所改变,并且可以决定某条指令是否被执行。

2) msr及mrs汇编指令
格式:MRS{<条件码>}Rd,CPSR}SPSR
其中:
Rd 目标寄存器,Rd不允许R15。
R=0 将CPSR中的内容传送目的寄存器。
R=1 将SPSR中的内容传送至目的寄存器。
功能:将状态寄存器的内容传送至通用寄存器。
2 格式:MSR{<条件码>CPSR_<field>|SPSR_<field>,Rm
其中:
<field>字段可以是以下之一或多种:(位从右到左)
C:控制域屏蔽字段(PSR中的第0位到第7位);
X:扩展域屏蔽字段(PSR中的第8位到第15位);
S:状态域屏蔽字段(PSR中的第16位到第32位);
F:标志域屏蔽字段(PSR中的第24位到第31位)。
Rm 源寄存器。
功能:将通用寄存器的内容传送至状态寄存器。
(3)当触发中断时,CPU进入中断模式,并跳转到中断异常向量处进行执行:
1.计算返回地址
2.现场保存工作
3.执行中断服务函数
4.清理现场,中断返回
handle_iqr: sub lr,lr, #4 //lr=lr-4 计算返回地址 stmdb sp!, {r0-r12,lr} ldr lr, =int_return ldr pc, =EINT_Handleiqr int_return: ldmia sp!, {r0-r12,pc}^