1--初识v-rep
1.1V-rep下载及安装
注:v-rep已经更名为CoppeliaSim,本文依旧使用v-rep。
输入以下网址https://www.coppeliarobotics.com/,进入v-rep官网。点击Downloads,可见三种版本的v-rep可供选择。Player和edu版本可免费使用,pro版需要购买。这里我们选择edu版本。版本号为4.0.0。
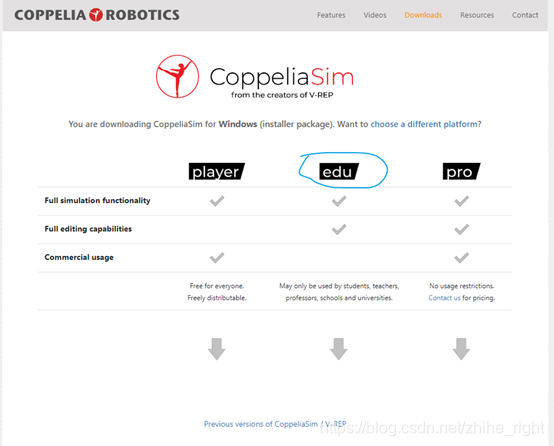
在本页面点击previous versions of coppeliasim/V-REP可下载旧版本。同时可以,选择不同的平台。可支持Windows、mac、Ubuntu16.04、Ubuntu18.04。

下载Windows版本之后,安装简单,就不做演示了。
1.2 V-rep工作界面介绍
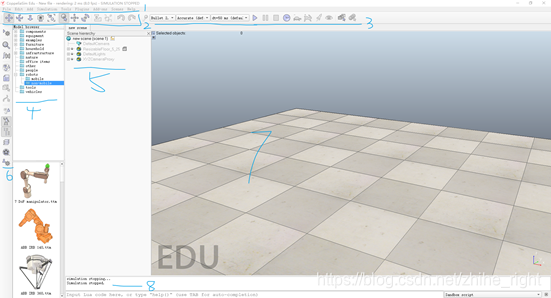
如下图,图中的编号依次为
- 下拉菜单栏,里面包含文件保存、模型操作等等
- Scene操作栏,主要是对scene进行缩放、平移、旋转,以及对处于scene中的object进行旋转、平移。
- 仿真栏,v-rep进行开始仿真、暂停和停止按钮,以及仿真加速、减速操作。还包含scene形式选择。
- Model选择栏,在改行可选择model,并把model拖进scene中。
- Scene内容栏,里面包含了处于scene中的所有对象,也可进行节点的调整。
- 其它工具,可进行脚本创建、碰撞检测设置、以及仿真设置。
- Scene,也就是机器人的工作界面。
- 仿真信息输出窗口
1.3 ur5跟随目标运动
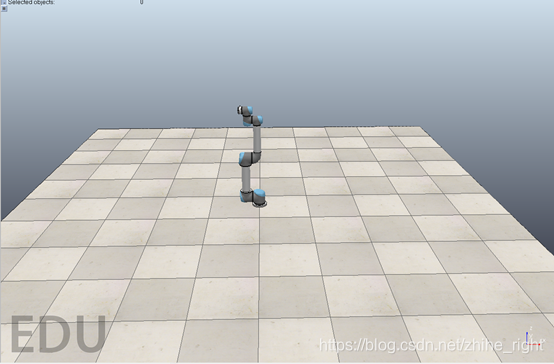
1.在4<model browser>中选择,robot->non-mobile,找到ur5,拖至scene。
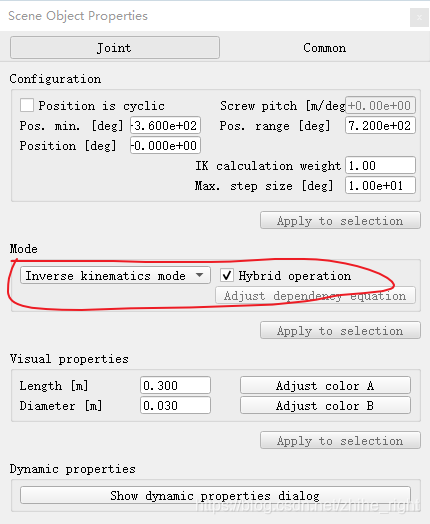
2.点击UR5_joint1上的图标,弹出scene object properties,再设置mode,将其设置为inverse kinematics mode,并且勾选上hybrid operation。最后再按照同样方法设置其余关节。

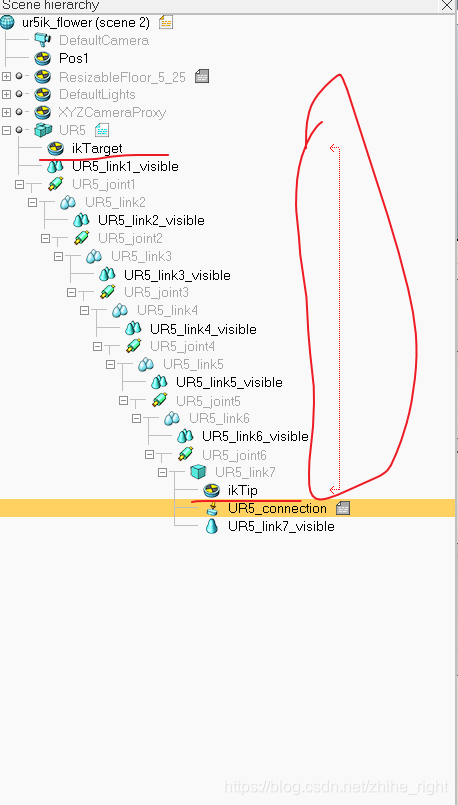
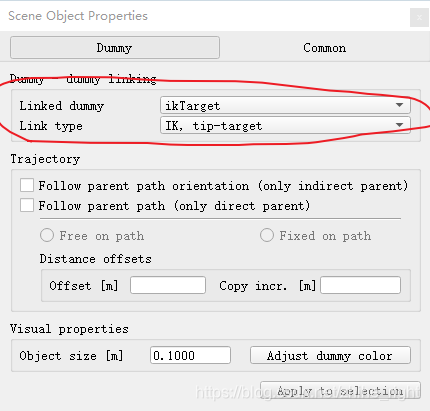
3.为机械臂设置dummy对
点击菜单栏---add,选中dummy,更改名称。创建两个dummy,一个命名为ikTip,另一个命名为ikTarget。在点击dummy,设置 配对。选择需要配对的对象即可。
4.创建ik group
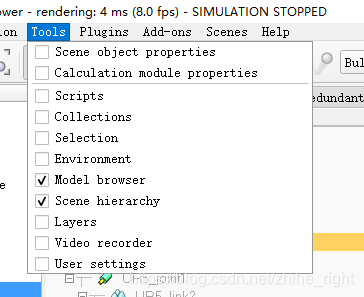
选中ur5,再点击tool,选择calculation module properties 。

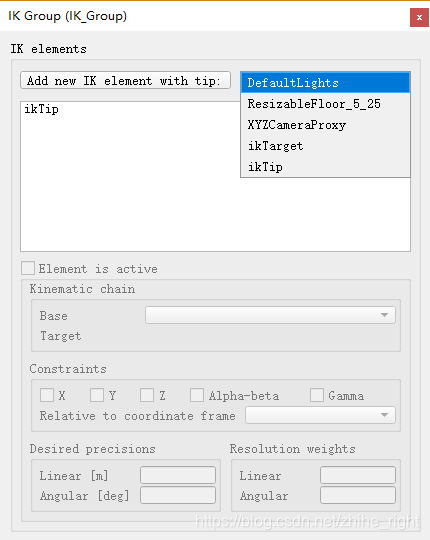
点击kinematics,再点击add new ik group,空白框出现IK_Group,可以选择命名。第四步,点击edit IK elements.

IK elements中先选择需要添加的tip,再点击添加即可。

完成之后,再设置target的位置。应当把target的位置设置在ur5机械臂的工作空间中。<如果,没有这样设置,会导致机械臂走不到目标点,而随处旋转。>
最终效果:视频地址https://www.bilibili.com/video/BV1NC4y1h7Sz/
vrep仿真-ur5跟随鼠标运动