原文地址:
https://www.cnblogs.com/zhaochenliang/p/10453255.html
-------------------------------------------
仿生机器人研究是非常有意思的领域,它不仅从自然界中获取灵感,它也为一些生物的研究提供一个手段和基础,正如下图中所展示的。不论人工智能发展的如何迅速,机械结构始终做为着一个承载的平台,其重要性不可忽略。
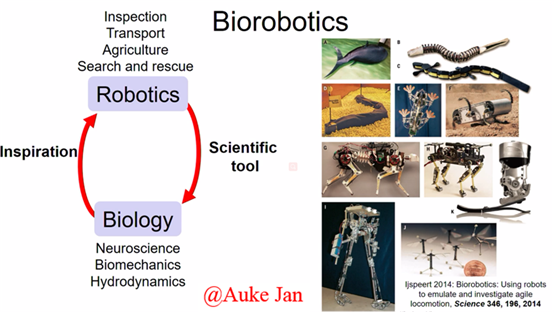
(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
仿生机器人有结构仿生,上图不难看出,但也有着仿生控制方法,相比于广泛存在基于模型,和基于行为的控制方法,它不需要进行复杂的数学计算和分析,方法相对简单,但是要想用于实际的工程中,需要结合生物运动资料或者优化算法来确定控制的参数。在这里主要介绍下生物控制方法(此处指 中枢模式发生器,CPG)在机器人中的运用。
Auke Jan的实验室进行了许多CPG的实践,下图是一个很好的展示,在动物的行走控制中,控制网络主要包括三部分,即高层中枢系统(对应下图的Descending modulation)、低级中枢系统(Central pattern generators)以及信息反馈模块(Reflexes)。
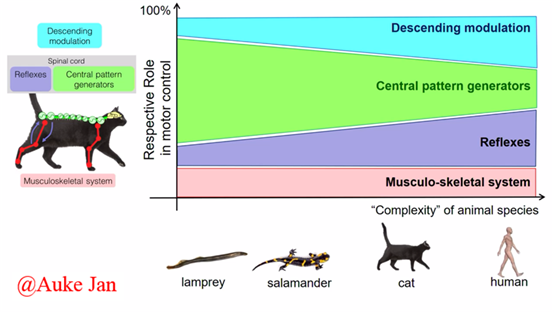
(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
高层中枢系统 提供 控制节律运动起始的信号 并 对整个运动过程进行监控,特别是动物在复杂环境中运动,高层中枢的调控作用更为突出。行走控制网络的前向通道以脊椎动物的脊髓(CPG)为中心控制单元,产生控制肌肉收缩的舒张的基本节律控制信号。CPG具有独立于神经中枢和外围传入、自激产生运动控制信号的特性,而CPG控制网络要复杂、稳定的运动控制信号,高层中枢系统和反馈信息的实时调控是必不可少的。
动物实现行走的关键在于神经系统对"肌肉-骨骼"系统的精确控制,"肌肉-骨骼"系统是动物躯体运动及姿态实现的物质基础,运动神经元网络与之相连,传递脊髓的运动控制信号。下图可以看到,在拥有更多运动行为的人类身体中,其CPG网络也更加复杂,这在以后介绍。
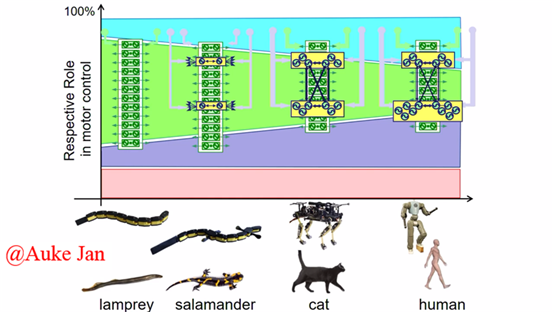
(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
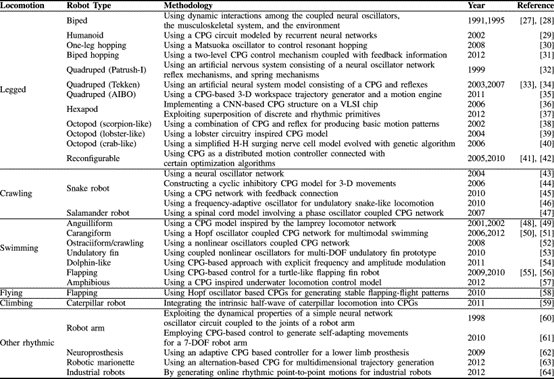
在14年的文献综述中也对机器人进行了总结,将其中一张图截出以作展示。(Yu J , Tan M , Chen J , et al. A Survey on CPG-Inspired Control Models and System Implementation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3):441-456.)
The bioinspired CPG control has proven to be successful in diverse robotic applications, including legged robots (e.g., biped/humanoid, quadruped, hexapod, octopod, and reconfigurable), crawling robots (e.g., snake-like and salamander-like), swimming robots (anguilliform, carangiform, ostraciiform, undulatory dorsal or pelvic fins, dolphin-like, flapping fins, and amphibious), flying robots (i.e., flapping flight),climbing robots (e.g., caterpillar), and other rhythmic motions(e.g., robot arm, neuro prosthesis, robotic marionette, and industrial robots). Note that the rhythmic movements are not applicable to wheeled and tracked locomotion. (Yu J , Tan M , Chen J , et al. A Survey on CPG-Inspired Control Models and System Implementation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3):441-456.)
做以上简单总结,以供后来之思。
--------------------------------------------------