https://zhuanlan.zhihu.com/p/84415000
0. 为什么要用QR分解
的问题可以分成3类:
- 情况1:A是方阵,m=n
- 情况2:A是over-determined的,m>n
- 情况3:A是under-determined的,m<n
在[数值计算] 条件数的例子2里,遇到的情况1(A是方阵),通过构造拉格朗日插值来使得对A求逆足够稳定。对于一般的情况下,解决思路是使用LU(LUP)分解来解决稳定性问题,在前一篇文中已经简介过了[数值计算] LU分解、LUP分解、Cholesky分解。
对于后两种情况, [数值计算] 数据拟合——线性最小二乘法 分析了用正规方程组求解over-determined以及under-determined的问题。但在文中也提到了,对于over-determined的线性最小二乘问题,正规方程组是不稳定的,通常需要用QR分解来处理:
理论很美好,在小数据量的时候没问题,然而直接使用正规方程组求解会在数据量大(e.g. data size > 100)的时候不稳定numerically unstable。原因是 需要对求逆,而A我们都知道是Vandermonde矩阵的一部分,本身就是poorly conditioned,而
1. QR分解
1.1 定义
一个矩阵 可以被分解成
,其中:
是正交矩阵
是上三角矩阵
1.2 正交矩阵的性质
- 左乘一个正交矩阵对欧式范数的结果不影响(在下面证明eq.2的时候会用到)
1.3 从QR分解角度看线性最小二乘
对于一个over-determined线性最小二乘问题 ,其目标函数是
这里 ,
,
,
。
如果把 拆分成上下两部分,形式
类似,
。那么目标函数可以写成下面的形式:
可以看到,我们只能最小化前一部分 到0,即
,
的最小值为
。这样处理之后就避免了求正规方程组中的
,避免了条件数变成
,所以QR分解法更加数值稳定。
1.4 计算QR分解的方法
一共有三种:
- Gram–Schmidt Orthogonalization
- Householder Triangularization
- Givens Rotations
1.5 Gram–Schmidt Orthogonalization
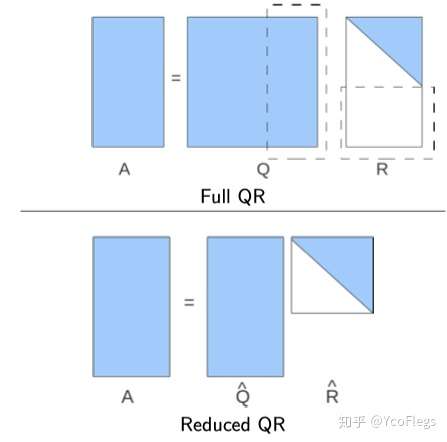
1.5.1 Reduced QR分解
GSO构建正交矩阵 的方法是从A矩阵的n个列(
)中构建互相正交的基,先选定
为第一个基,然后把第二列
减去平行于
的部分,剩下的垂直于
的部分作为下一个基,以此类推,直到生成了n个基。
这个方法生成的 ,
,和section1.1中定义的Q是方阵,R不是方阵有区别。这个结果被称为Reduced QR分解,因为m>n,所以只满足
,而不满足
。
 Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
Reduced QR分解同样可以求解over-determined线性最小二乘问题。形式类似Full QR分解:
其中 ,
。
1.5.2 Full QR分解
为了实现定义中的完整的QR分解,需要把上面生成Q中的n个基拓展成m个互相正交的基。但此处并没有对额外的m-n个基的顺序有特殊要求,因此任意一种顺序都可以。另外还需要把 下面加m-n行零矩阵。
在Python中,Reduced QR分解和Full QR分解对应于
q,r = np.linalg.qr(A) # reduced
q,r = np.linalg.qr(A,mode="complete") # full1.5.3 Classic Gram–Schmidt Orthogonalization算法 CGSO
观察Eq.4可以发现,其实每一步迭代都只有一个 未知:左边
已知,右边
已知, q的系数们
可以用公式
求得。把
代入Eq.4,并整理可得
因此 ,
。其中,
的符号不确定是因为,任意一个基方向反向之后,这个QR分解不会有任何问题,这个基仍然和其他基正交。为了计算方便,这里就规定
。
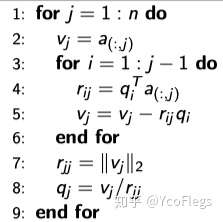
整理上面计算 和
的过程为算法的形式:
 Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
观察算法过程,可以发现,唯一可能在理论上出问题的情况就是,出现某个 =0,导致在算法第8行出现0在分母上的情况。因此只要
是满秩的,且每个
都>0,那么reduced QR分解的结果是唯一的。
1.5.4 Modified Gram–Schmidt Orthogonalization算法 MGSO
由于CGSO对舍入误差很敏感,容易导致生成的基 的正交性随着迭代越来越弱,因此引入改进的GSO。核心思想是,在每个
生成后,直接把A剩下的列(下面算法第7行)都去掉
的成分(下面算法的第8-9行)。因为只是把计算的顺序变了,所以理论上计算结果是一样的。
 Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
但是改进之后稳定性会好很多。从实际计算步骤上来看,CGSO和MGSO的区别在于,CGSO中,每次迭代新的一列 ,计算每个
都是用的同一个
,而MGSO计算
的时候用的
是已经减去前面j-1个基的分量之后的
。
这样做的好处是:误差的传递是局部的。比如计算 是精确的,计算
出现误差,即,
在
上存在一个微小分量。按照CGSO,接下来要分别计算
在
和
的分量,最终
;而MGSO则先计算
在
上的分量,去除掉这个分量之后成为
,再计算并去除
在
上的分量得到最终的
,此时如果计算是精确的,那么至少可以保证
。
直观理解参考下面这张图,在三维xyz坐标系里, 是带误差的
。用CGSO处理
的时候,
用的是初始值
,包含了
和
两个方向的误差,而用MGSO处理
的时候,
用的是去掉
分量之后的
,只有
方向的误差。
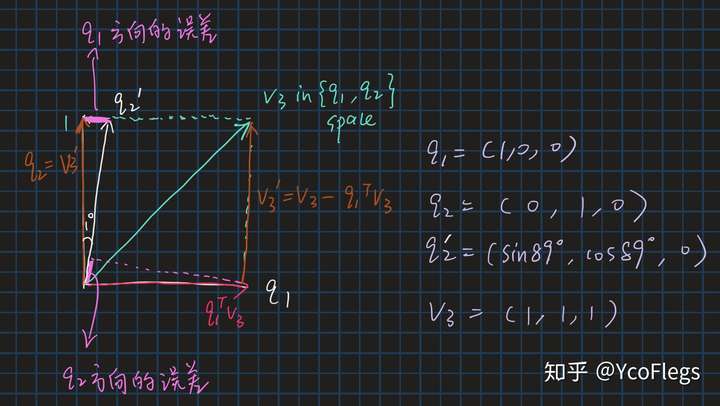
公式上计算这些误差参考The modified Gram-Schmidt procedure:
 Credit to https://www.math.uci.edu/~ttrogdon/105A/html/Lecture23.html
Credit to https://www.math.uci.edu/~ttrogdon/105A/html/Lecture23.html
1.6 Givens Rotations
1.6.1 Givens Rotation Matrix
1.6.2 Givens Rotations的作用
对于一个矩阵,对于第i列的第j和k行
,如果
元素不为0,可以通过一个Givens Rotation把它转换成0。
当 或者
很小或者很大,且它们的平方不是用float表示的时候,对它们求平方会导致上溢出或者下溢出。因此更好的公式是:
- 如果
,那么设
- 如果
,那么设
不过这个问题基本只有在设计package造轮子的时候才会遇到,所以通常用Eq.10不会引起问题。详见Scientific Computing - Heath的第128页。
另外,在涉及反三角的数值运算的时候,建议使用atan2替代atan,范围更大,更稳定。例如atan2(y,x)会返回一个(x,y)向量和正x轴的夹角。
the difference between atan and atan2 in C++?stackoverflow.com wikipedia Atan2
wikipedia Atan2
1.6.3 Givens Rotations 算法
对于一个稠密的矩阵,逐渐把A消元成R(参考1.5.1的full QR的图)。
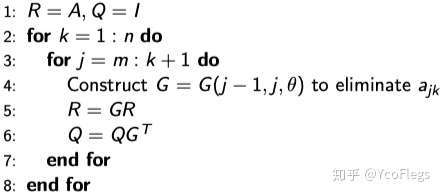 Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
Credit to http://iacs-courses.seas.harvard.edu/courses/am205/schedule/
注意第三行的循环,j是从大到小的迭代。
1.6.4 Givens Rotations 优势
当A是稠密矩阵,Givens Rotations并没有比另外两种算法更高效,但如果A是稀疏矩阵,那么Givens Rotations大小为0的元素可以直接被忽略。另一个优势是,Givens Rotations更容易并行化,因为Givens Rotations只对两个元素进行操作,处理不同列的时候可以完全的独立。