前言
本文与前文对手写数字识别分类基本类似的,同样图像作为输入,类别作为输出。这里不同的是,不仅仅是使用简单的卷积神经网络加上全连接层的模型。卷积神经网络大火以来,发展出来许多经典的卷积神经网络模型,包括VGG、ResNet、AlexNet等等。下面将针对CIFAR-10数据集,对图像进行分类。
1、CIFAR-10数据集、Reader创建
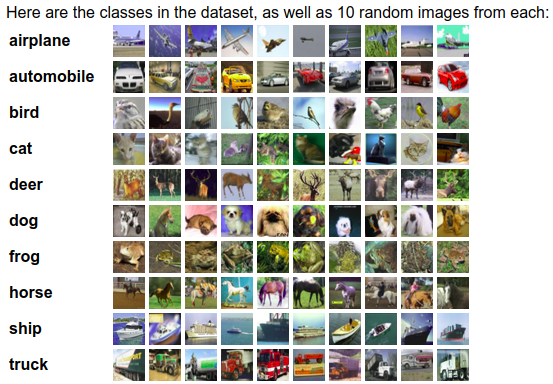
CIFAR-10数据集分为5个batch的训练集和1个batch的测试集,每个batch包含10,000张图片。每张图像尺寸为32*32的RGB图像,且包含有标签。一共有10个标签:airplane、automobile、bird、cat、deer、dog、frog、horse、ship、truck十个类别。
我在CIFAR-10网站中下载的是[CIFAR-10 python version](http://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz)。数据集完成后,解压得到上述六个文件。上述六个文件都是字典文件,使用cPickle模块即可读入。字典中‘data’需要重新定义维度为1000*32*32*3,维度分别代表[N H W C],即10,000张32*32尺寸的三通道(RGB)图像,再经过转换成为paddlepaddle读取的[N C H W ]维度形式;而字典‘labels’为10000个标签。如此一来,可以建立读取CIFAR-10的reader(与官方例程不同),如下:


def reader_creator(ROOT,istrain=True,cycle=False): def load_CIFAR_batch(filename): """ load single batch of cifar """ with open(filename,'rb') as f: datadict = Pickle.load(f) X = datadict['data'] Y = datadict['labels'] """ (N C H W) transpose to (N H W C) """ X = X.reshape(10000,3,32,32).transpose(0,2,3,1).astype('float') Y = np.array(Y) return X,Y def reader(): while True: if istrain: for b in range(1,6): f = os.path.join(ROOT,'data_batch_%d'%(b)) X,Y = load_CIFAR_batch(f) length = X.shape[0] for i in range(length): yield X[i],Y[i] if not cycle: break else: f = os.path.join(ROOT,'test_batch') X,Y = load_CIFAR_batch(f) length = X.shape[0] for i in range(length): yield X[i],Y[i] if not cycle: break return reader
2、VGG网络
VGG网络采用“减小卷积核大小,增加卷积核数量”的思想改造而成,这里直接采用paddlepaddle例程中的VGG网络了,值得提醒的是paddlepaddle中直接有函数img_conv_group提供卷积、池化、dropout一组操作,所以根据VGG的模型,前面卷积层可以划分为5组,然后再经过3层的全连接层得到结果。
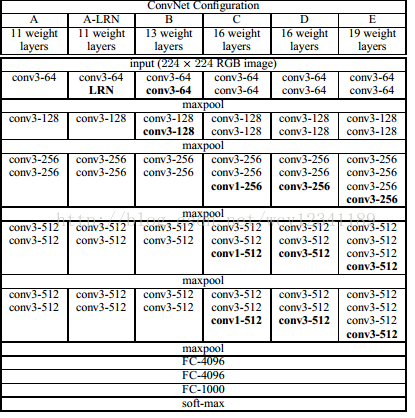
PaddlePaddle例程中根据上图D网络,加入dorpout:
def vgg_bn_drop(input): def conv_block(ipt, num_filter, groups, dropouts): return fluid.nets.img_conv_group( input=ipt, #一组的卷积层的卷积核总数,组成list[num_filter num_filter ...] conv_num_filter=[num_filter] * groups, conv_filter_size=3, conv_act='relu', conv_with_batchnorm=True, #每组卷积层各层的droput概率 conv_batchnorm_drop_rate=dropouts, pool_size=2, pool_stride=2, pool_type='max') conv1 = conv_block(input, 64, 2, [0.3, 0]) #[0.3 0]即为第一组两层的dorpout概率,下同 conv2 = conv_block(conv1, 128, 2, [0.4, 0]) conv3 = conv_block(conv2, 256, 3, [0.4, 0.4, 0]) conv4 = conv_block(conv3, 512, 3, [0.4, 0.4, 0]) conv5 = conv_block(conv4, 512, 3, [0.4, 0.4, 0]) drop = fluid.layers.dropout(x=conv5, dropout_prob=0.5) fc1 = fluid.layers.fc(input=drop, size=512, act=None) bn = fluid.layers.batch_norm(input=fc1, act='relu') drop2 = fluid.layers.dropout(x=bn, dropout_prob=0.5) fc2 = fluid.layers.fc(input=drop2, size=512, act=None) predict = fluid.layers.fc(input=fc2, size=10, act='softmax') return predict
3、训练
训练程序与上一节例程一样,同样是选取交叉熵作为损失函数,不多累赘讲述。
def train_network(): predict = inference_network() label = fluid.layers.data(name='label',shape=[1],dtype='int64') cost = fluid.layers.cross_entropy(input=predict,label=label) avg_cost = fluid.layers.mean(cost) accuracy = fluid.layers.accuracy(input=predict,label=label) return [avg_cost,accuracy] def optimizer_program(): return fluid.optimizer.Adam(learning_rate=0.001) def train(data_path,save_path): BATCH_SIZE = 128 EPOCH_NUM = 2 train_reader = paddle.batch( paddle.reader.shuffle(reader_creator(data_path),buf_size=50000), batch_size = BATCH_SIZE) test_reader = paddle.batch( reader_creator(data_path,False), batch_size=BATCH_SIZE) def event_handler(event): if isinstance(event, fluid.EndStepEvent): if event.step % 100 == 0: print(" Pass %d, Epoch %d, Cost %f, Acc %f" % (event.step, event.epoch, event.metrics[0], event.metrics[1])) else: sys.stdout.write('.') sys.stdout.flush() if isinstance(event, fluid.EndEpochEvent): avg_cost, accuracy = trainer.test( reader=test_reader, feed_order=['image', 'label']) print(' Test with Pass {0}, Loss {1:2.2}, Acc {2:2.2}'.format( event.epoch, avg_cost, accuracy)) if save_path is not None: trainer.save_params(save_path) place = fluid.CUDAPlace(0) trainer = fluid.Trainer( train_func=train_network, optimizer_func=optimizer_program, place=place) trainer.train( reader=train_reader, num_epochs=EPOCH_NUM, event_handler=event_handler, feed_order=['image', 'label'])
4、测试接口
测试接口也类似,需要特别注意的是图像维度要改为[N C H W]的顺序!
def infer(params_dir): place = fluid.CUDAPlace(0) inferencer = fluid.Inferencer( infer_func=inference_network, param_path=params_dir, place=place) # Prepare testing data. from PIL import Image import numpy as np import os def load_image(file): im = Image.open(file) im = im.resize((32, 32), Image.ANTIALIAS) im = np.array(im).astype(np.float32) """transpose [H W C] to [C H W]""" im = im.transpose((2, 0, 1)) im = im / 255.0 # Add one dimension, [N C H W] N=1 im = np.expand_dims(im, axis=0) return im cur_dir = os.path.dirname(os.path.realpath(__file__)) img = load_image(cur_dir + '/dog.png') # inference results = inferencer.infer({'image': img}) print(results) lab = np.argsort(results) # probs and lab are the results of one batch data print("infer results: ", cifar_classes[lab[0][0][-1]])
5、运行结果
由于笔者没有GPU服务器,所以只迭代了50次,已经用了8个多小时,但是准确率只有15.6%,测试集方面准确率有17%,效果不理想,用于验证的结果也是错的!
Pass 300, Epoch 49, Cost 2.261115, Acc 0.156250 ......................................................................................... Test with Pass 49, Loss 2.2, Acc 0.17 Classify the cifar10 images... [array([[0.05997971, 0.13485196, 0.096842 , 0.09973737, 0.11053724, 0.08180068, 0.13847008, 0.08627985, 0.06851784, 0.12298328]], dtype=float32)] infer results: frog
结语
网络比较深,且数据集比较大,训练时间比较长,普通笔记本上面的GT840M聊以胜无吧。
本文代码:02_cifar