保序回归
1 保序回归
保序回归解决了下面的问题:给定包含n个数据点的序列 y_1,y_2,...,y_n , 怎样通过一个单调的序列 beta_1,beta_2,...,beta_n 来归纳这个问题。形式上,这个问题就是为了找到

大部分时候,我们会在括号前加上权重w_i。解决这个问题的一个方法就是 pool adjacent violators algorithm(PAVA) 算法。粗略的讲,PAVA算法的过程描述如下:
我们从左边的y_1开始,右移y_1直到我们遇到第一个违例(violation)即y_i < y_i+1,然后,我们用违例之前的所有y的平方替换这些y,以满足单调性。我们继续这个过程,直到我们最后到达y_n。
2 近似保序
给定一个序列y_1,y_2,...,y_n,我们寻找一个近似单调估计,考虑下面的问题

在上式中,X_+表示正数部分,即X_+ = X.1 (x>0)。这是一个凸优化问题,处罚项处罚违反单调性(即beta_i > beta_i+1)的邻近对。
在公式(2)中,隐含着一个假设,即使用等距的网格测量数据点。如果情况不是这样,那么可以修改惩罚项为下面的形式

x_i表示y_i测量得到的值。
3 近似保序算法流程
这个算法是标准PAVA算法的修改版本,它并不从数据的左端开始,而是在需要时连接相邻的点,以产生近似保序最优的顺序。相比一下,PAVA对中间的序列并不特别感兴趣,只关心最后的序列。
有下面一个引理成立。

这个引理证明的事实极大地简化了近似保序解路径(solution path)的构造。假设在参数值为lambda的情况下,有K_lambda个连接块,我们用A_1,A_2,..,A_K_lambda表示。这样我们可以重写(2)为如下(3)的形式。

上面的公式,对beta求偏导,可以得到下面的次梯度公式。通过这个公式即可以求得beta。

为了符合方便,令s_0 = s_K_lambda = 0。并且,
现在假设,当lambda在一个区间内增长时,组A_1,A_2,...,A_K_lambda不会改变。我们可以通过相应的lambda区分(4)。

这个公式的值本身是一个常量,它意味着上式的beta是lambda的线性函数。
随着lambda的增长,方程(5)将连续的给出解决方案的斜率直到组A_1,A_2,...,A_K_lambda改变。更加引理1,只有两个组合并时,这才会发生。m_i表示斜率,那么对于每一个i=1,...,K_lambda - 1,A_i和A_i+1合并之后得到的公式如下

因此我们可以一直移动,直到lambda “下一个”值的到来

并且合并A_i^star和A_i^star+1,其中

注意,可能有超过一对组别到达了这个最小值,在这种情况下,会组合所有满足条件的组别。公式(7)和(8)成立的条件是t_i,i+1大于lambda,如果没有t_i,i+1大于lambda,说明没有组别可以合并,算法将会终止。
算法的流程如下:
-
初始时,
lambda=0,K_lambda=n,A_i={i},i=1,2,...,n。对于每个i,解是beta_lambda,i = y_i -
重复下面过程 -
**1、**通过公式(5)计算每个组的斜率
m_i -
**2、**通过公式(6)计算没对相邻组的碰撞次数
t_i,i+1**3、**如果
t_i,i+1 < lambda,终止**4、**计算公式(7)中的临界点
lambda^star,并根据斜率更新解
对于每个
i,根据公式(8)合并合适的组别(所以K_lambda^star = K_lambda - 1),并设置lambda = lambda^star。4 源码分析
在
1.6.x版本中,并没有实现近似保序回归,后续会实现。现在我们只介绍一般的保序回归算法实现。4.1 实例
import org.apache.spark.mllib.regression.{IsotonicRegression, IsotonicRegressionModel} val data = sc.textFile("data/mllib/sample_isotonic_regression_data.txt") // 创建(label, feature, weight) tuples ,权重默认设置为1.0 val parsedData = data.map { line => val parts = line.split(',').map(_.toDouble) (parts(0), parts(1), 1.0) } // Split data into training (60%) and test (40%) sets. val splits = parsedData.randomSplit(Array(0.6, 0.4), seed = 11L) val training = splits(0) val test = splits(1) // Create isotonic regression model from training data. // Isotonic parameter defaults to true so it is only shown for demonstration val model = new IsotonicRegression().setIsotonic(true).run(training) // Create tuples of predicted and real labels. val predictionAndLabel = test.map { point => val predictedLabel = model.predict(point._2) (predictedLabel, point._1) } // Calculate mean squared error between predicted and real labels. val meanSquaredError = predictionAndLabel.map { case (p, l) => math.pow((p - l), 2) }.mean() println("Mean Squared Error = " + meanSquaredError)4.2 训练过程分析
parallelPoolAdjacentViolators方法用于实现保序回归的训练。parallelPoolAdjacentViolators方法的代码如下:private def parallelPoolAdjacentViolators( input: RDD[(Double, Double, Double)]): Array[(Double, Double, Double)] = { val parallelStepResult = input //以(feature,label)为key进行排序 .sortBy(x => (x._2, x._1)) .glom()//合并不同分区的数据为一个数组 .flatMap(poolAdjacentViolators) .collect() .sortBy(x => (x._2, x._1)) // Sort again because collect() doesn't promise ordering. poolAdjacentViolators(parallelStepResult) }parallelPoolAdjacentViolators方法的主要实现是poolAdjacentViolators方法,该方法主要的实现过程如下:var i = 0 val len = input.length while (i < len) { var j = i //找到破坏单调性的元祖的index while (j < len - 1 && input(j)._1 > input(j + 1)._1) { j = j + 1 } // 如果没有找到违规点,移动到下一个数据点 if (i == j) { i = i + 1 } else { // 否则用pool方法处理违规的节点 // 并且检查pool之后,之前处理过的节点是否违反了单调性约束 while (i >= 0 && input(i)._1 > input(i + 1)._1) { pool(input, i, j) i = i - 1 } i = j } }pool方法的实现如下所示。def pool(input: Array[(Double, Double, Double)], start: Int, end: Int): Unit = { //取得i到j之间的元组组成的子序列 val poolSubArray = input.slice(start, end + 1) //求子序列sum(label * w)之和 val weightedSum = poolSubArray.map(lp => lp._1 * lp._3).sum //求权重之和 val weight = poolSubArray.map(_._3).sum var i = start //子区间的所有元组标签相同,即拥有相同的预测 while (i <= end) { //修改标签值为两者之商 input(i) = (weightedSum / weight, input(i)._2, input(i)._3) i = i + 1 } }经过上文的处理之后,
input根据中的label和feature均是按升序排列。对于拥有相同预测的点,我们只保留两个特征边界点。val compressed = ArrayBuffer.empty[(Double, Double, Double)] var (curLabel, curFeature, curWeight) = input.head var rightBound = curFeature def merge(): Unit = { compressed += ((curLabel, curFeature, curWeight)) if (rightBound > curFeature) { compressed += ((curLabel, rightBound, 0.0)) } } i = 1 while (i < input.length) { val (label, feature, weight) = input(i) if (label == curLabel) { //权重叠加 curWeight += weight rightBound = feature } else {//如果标签不同,合并 merge() curLabel = label curFeature = feature curWeight = weight rightBound = curFeature } i += 1 } merge()最后将训练的结果保存为模型。
//标签集 val predictions = if (isotonic) pooled.map(_._1) else pooled.map(-_._1) //特征集 val boundaries = pooled.map(_._2) new IsotonicRegressionModel(boundaries, predictions, isotonic)4.3 预测过程分析
def predict(testData: Double): Double = { def linearInterpolation(x1: Double, y1: Double, x2: Double, y2: Double, x: Double): Double = { y1 + (y2 - y1) * (x - x1) / (x2 - x1) } //二分查找index val foundIndex = binarySearch(boundaries, testData) val insertIndex = -foundIndex - 1 // Find if the index was lower than all values, // higher than all values, in between two values or exact match. if (insertIndex == 0) { predictions.head } else if (insertIndex == boundaries.length){ predictions.last } else if (foundIndex < 0) { linearInterpolation( boundaries(insertIndex - 1), predictions(insertIndex - 1), boundaries(insertIndex), predictions(insertIndex), testData) } else { predictions(foundIndex) } }当测试数据精确匹配一个边界,那么返回相应的特征。如果测试数据比所有边界都大或者小,那么分别返回第一个和最后一个特征。当测试数据位于两个边界之间,使用
linearInterpolation方法计算特征。 这个方法是线性内插法。 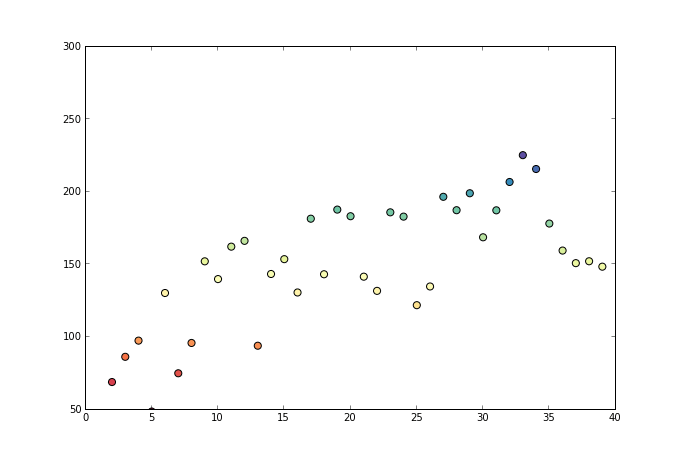
-
原文链接:https://github.com/endymecy/spark-ml-source-analysis/blob/master/%E5%88%86%E7%B1%BB%E5%92%8C%E5%9B%9E%E5%BD%92/%E4%BF%9D%E5%BA%8F%E5%9B%9E%E5%BD%92/isotonic-regression.md
- http://fa.bianp.net/blog/2013/isotonic-regression/