
high bias
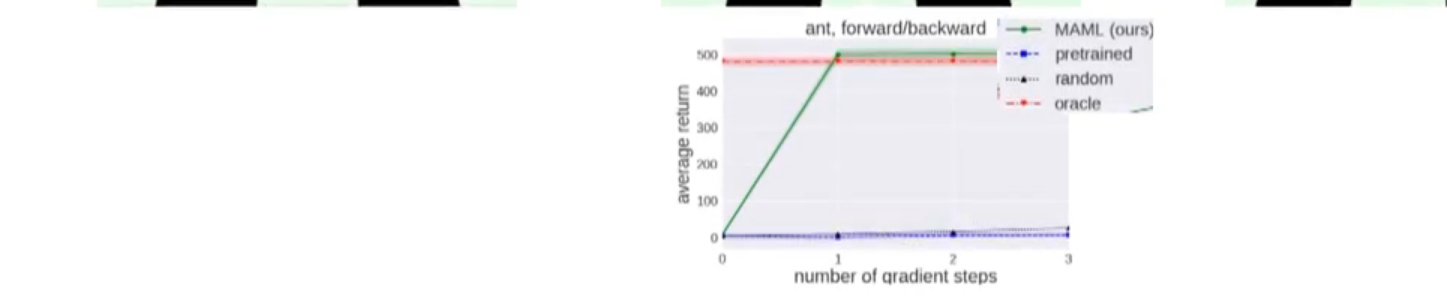
if the robot has learnt something (no changes appear with iterations)
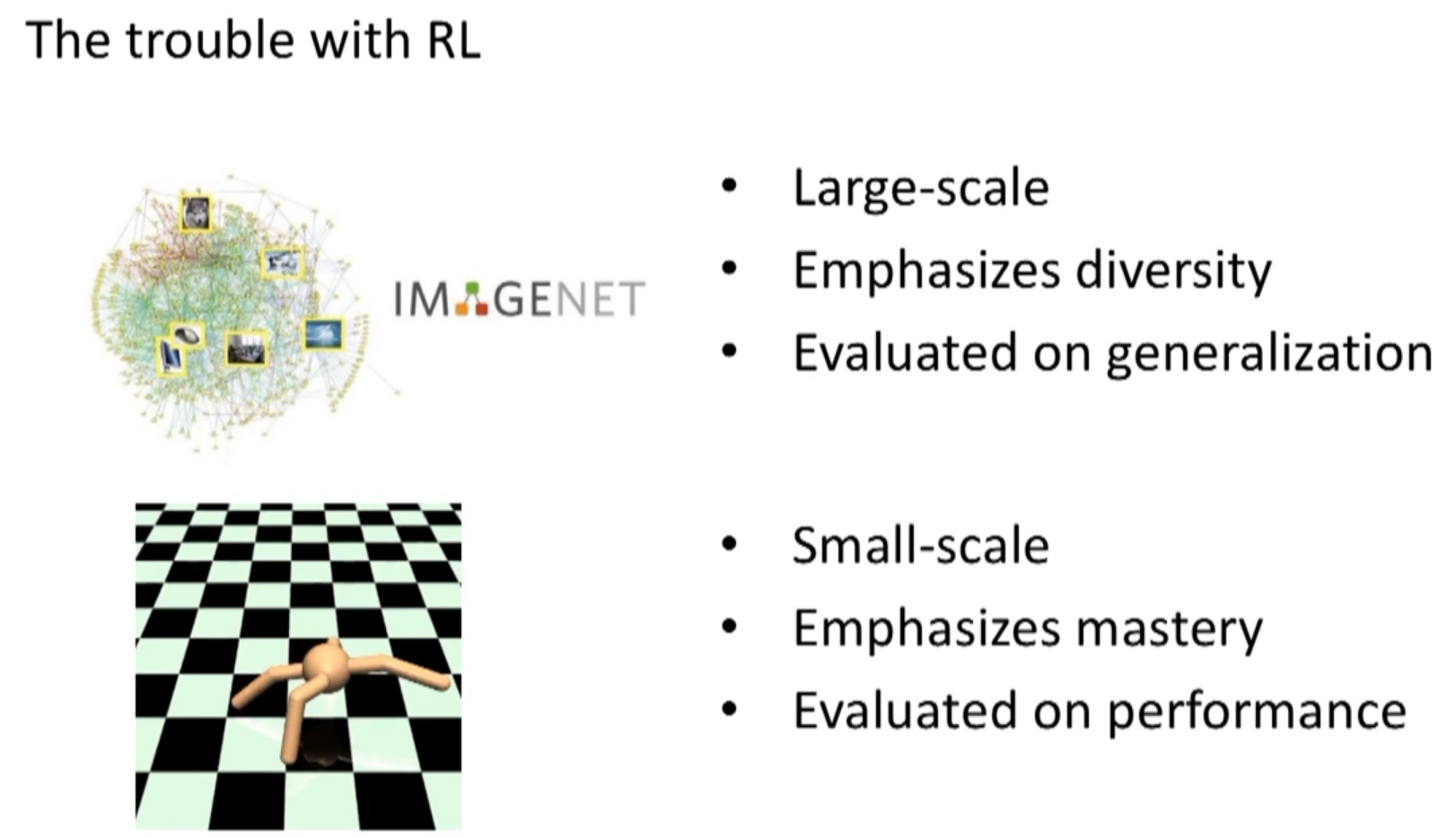
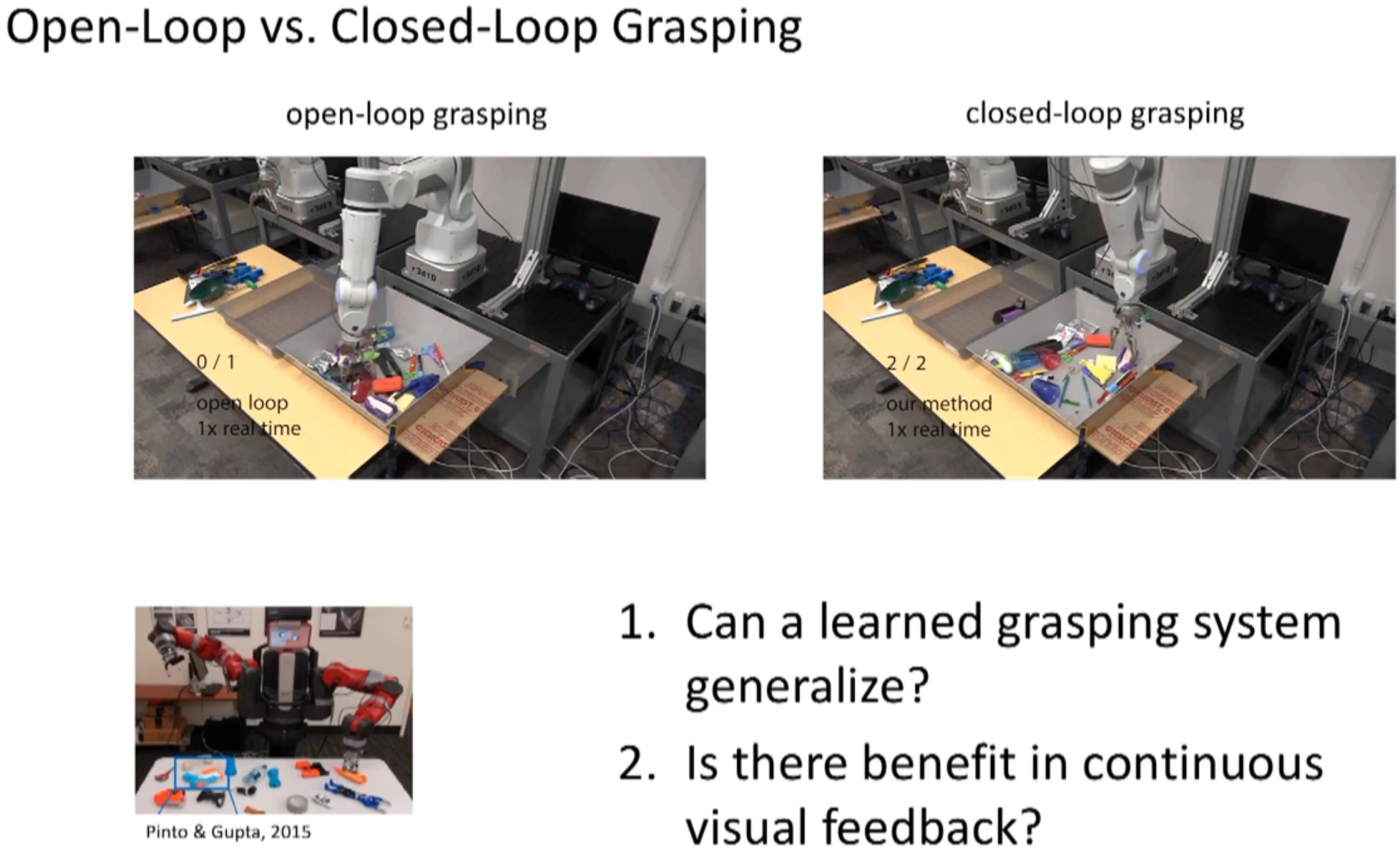
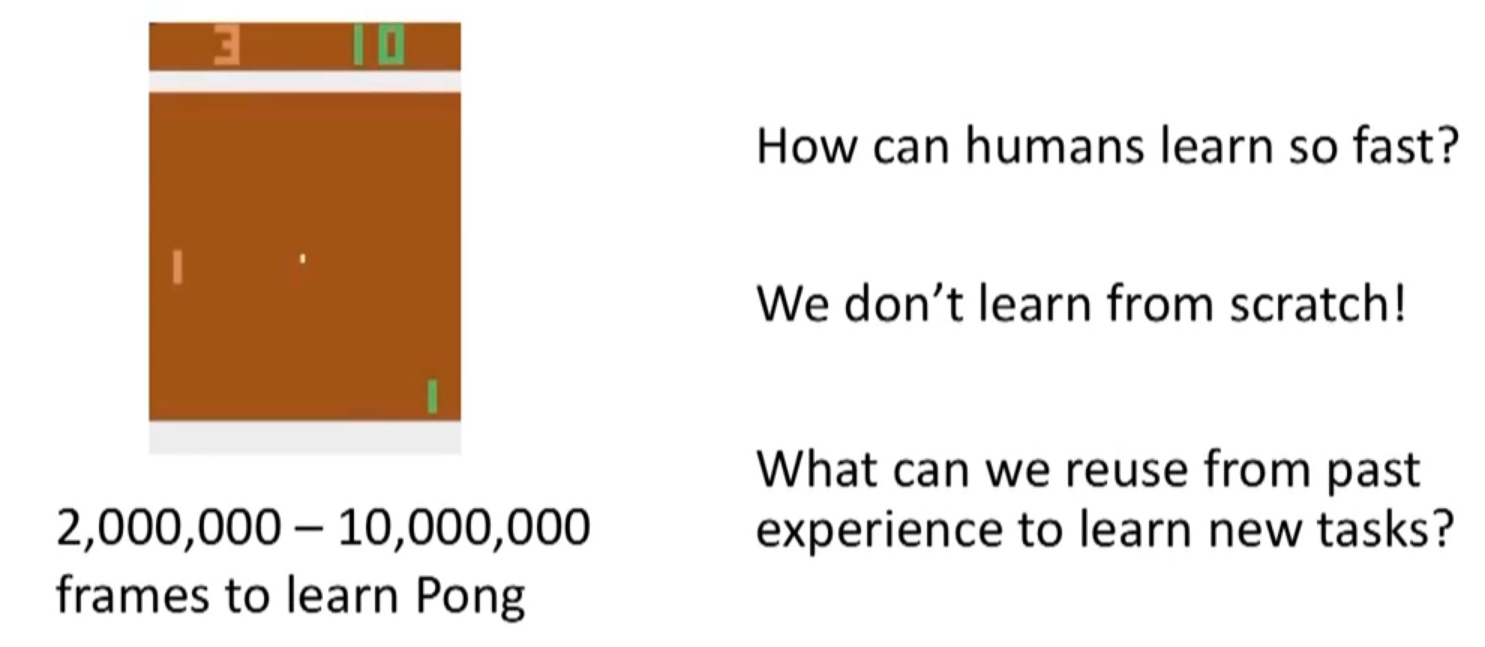
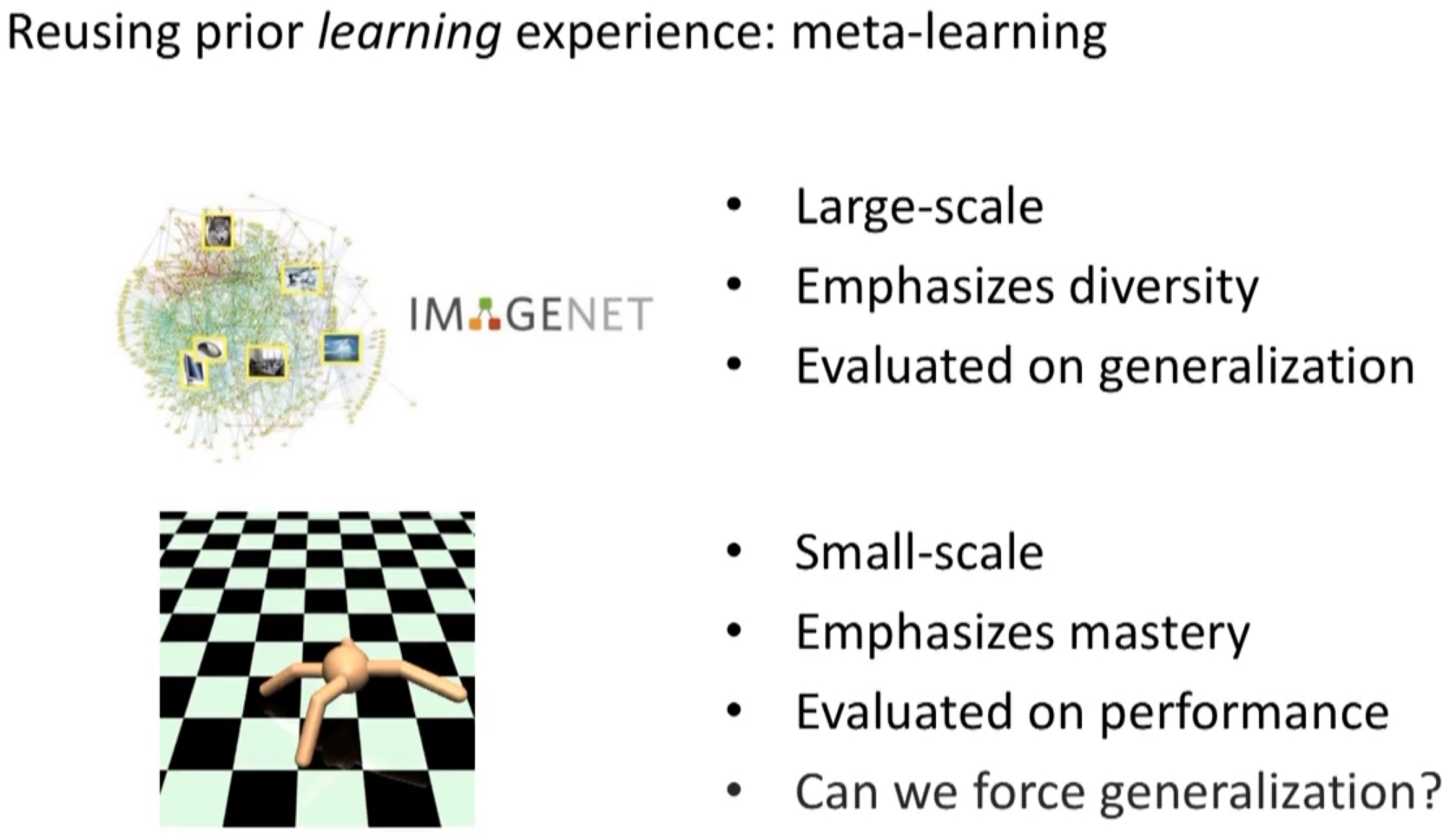
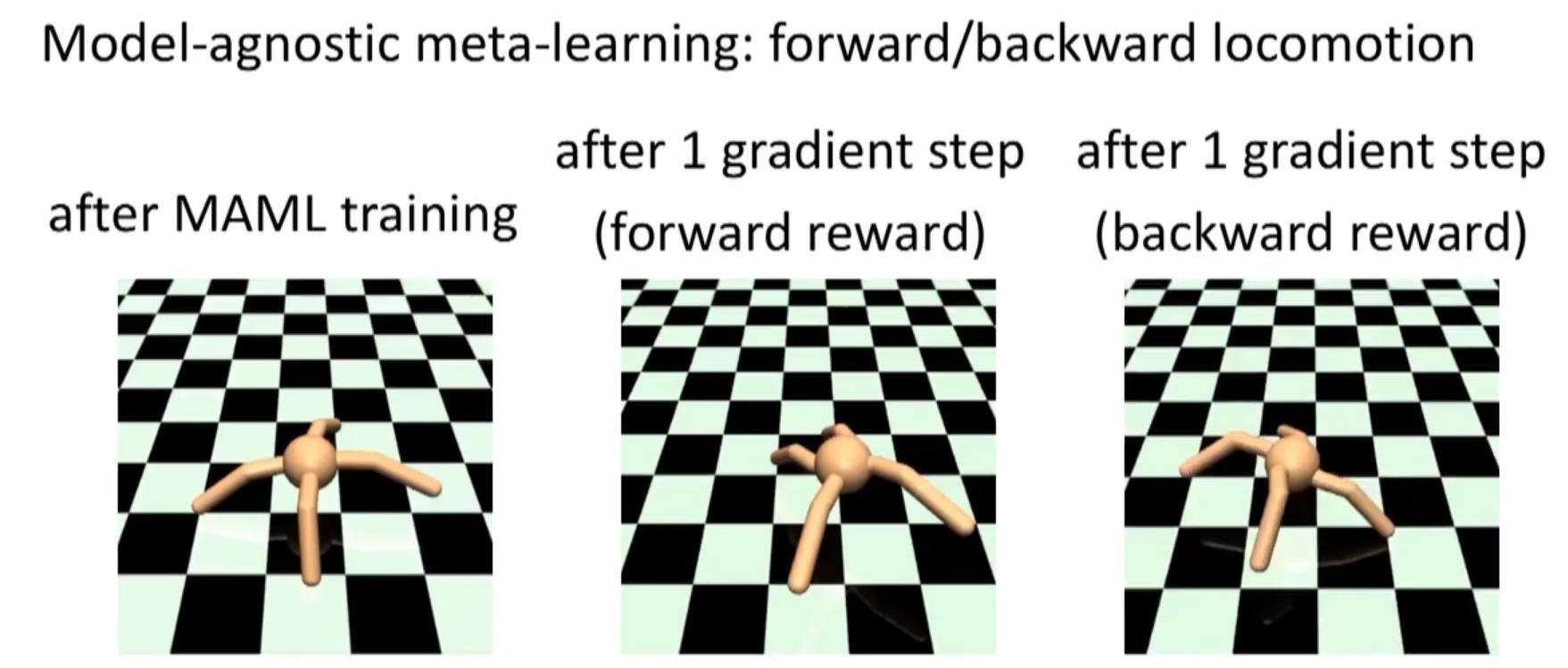
however, in the real world tasks, the task could change a little bit, then the robot will failed to generalize.
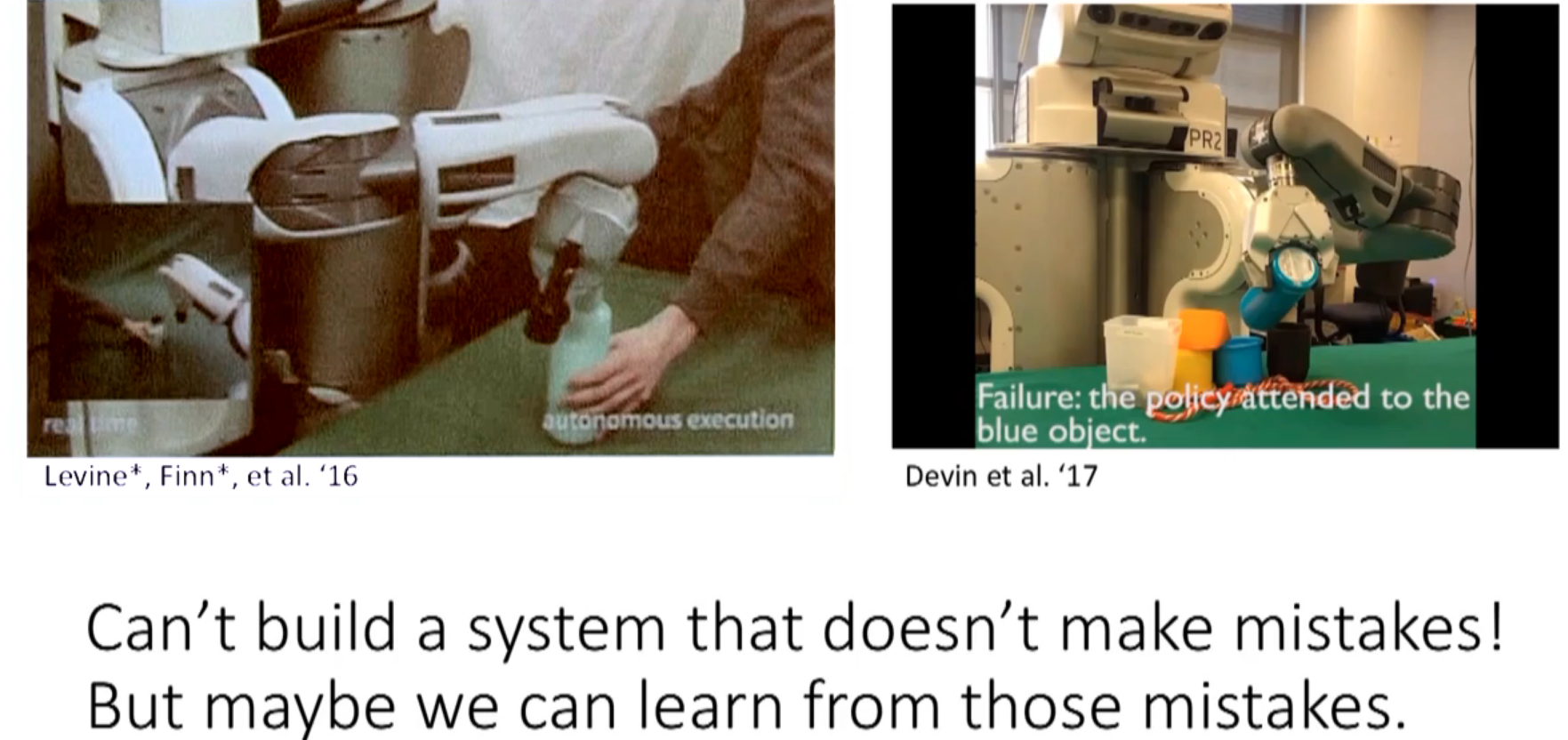
no matter how well we train the robot in situations, there's always something that happens and messes up the system.


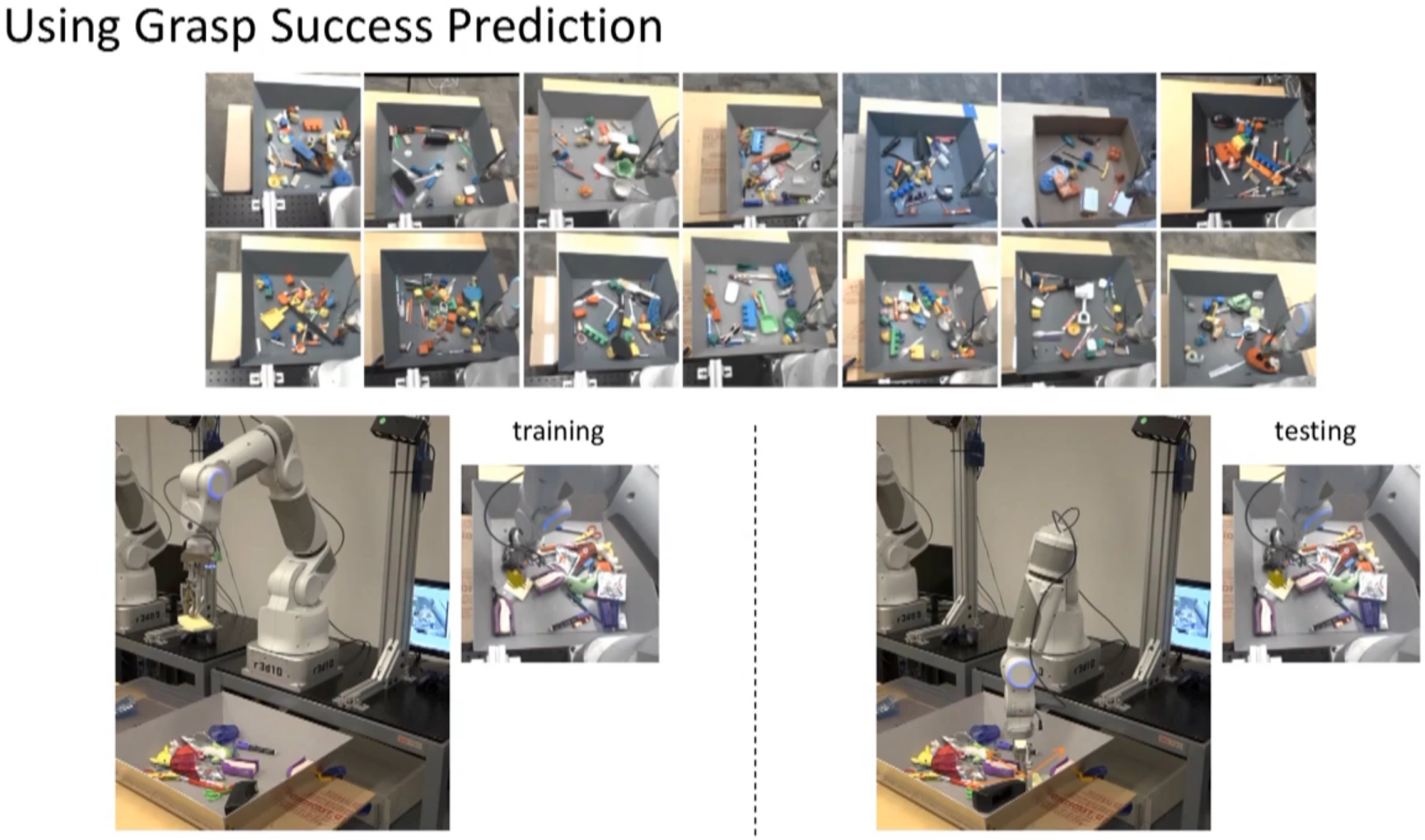
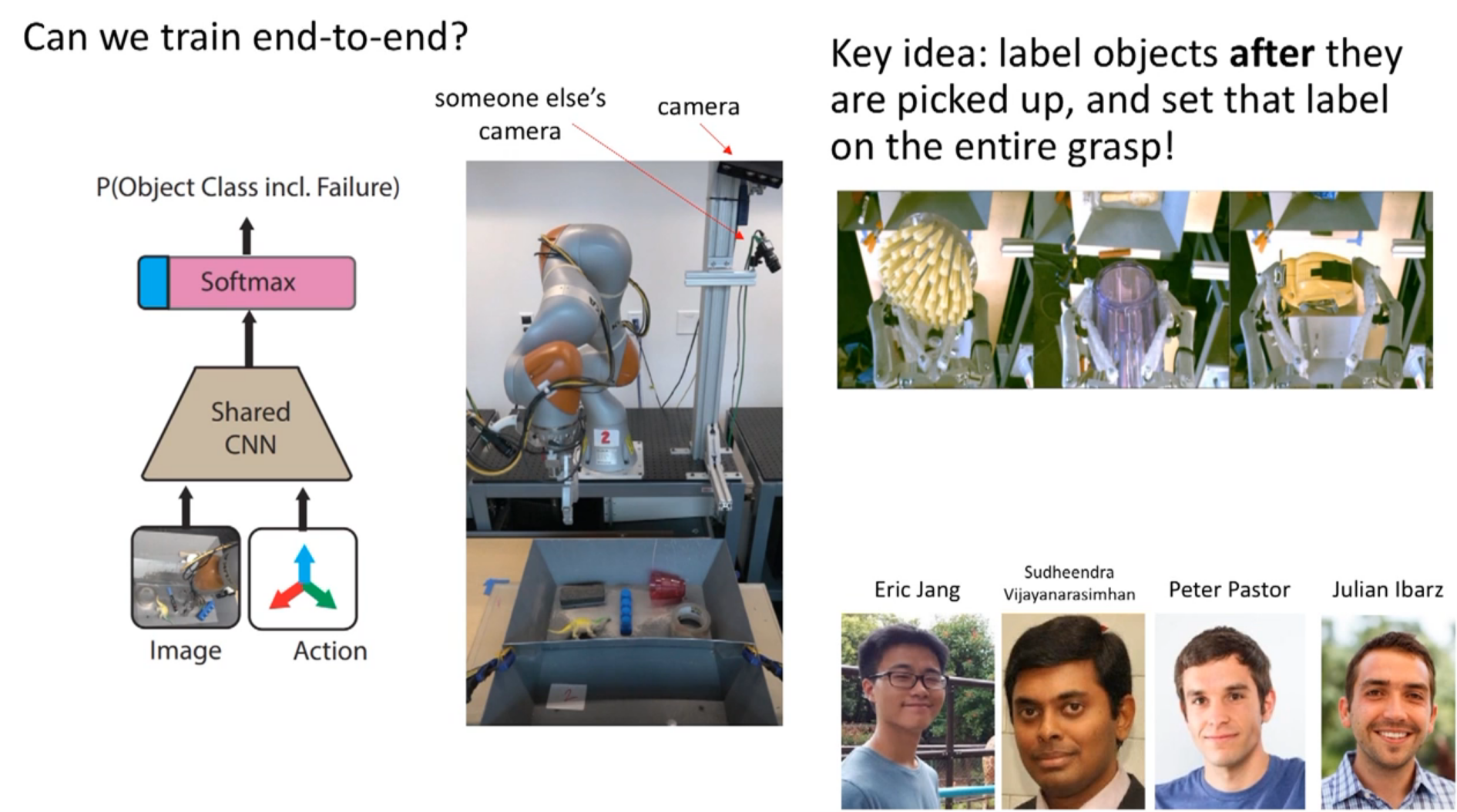
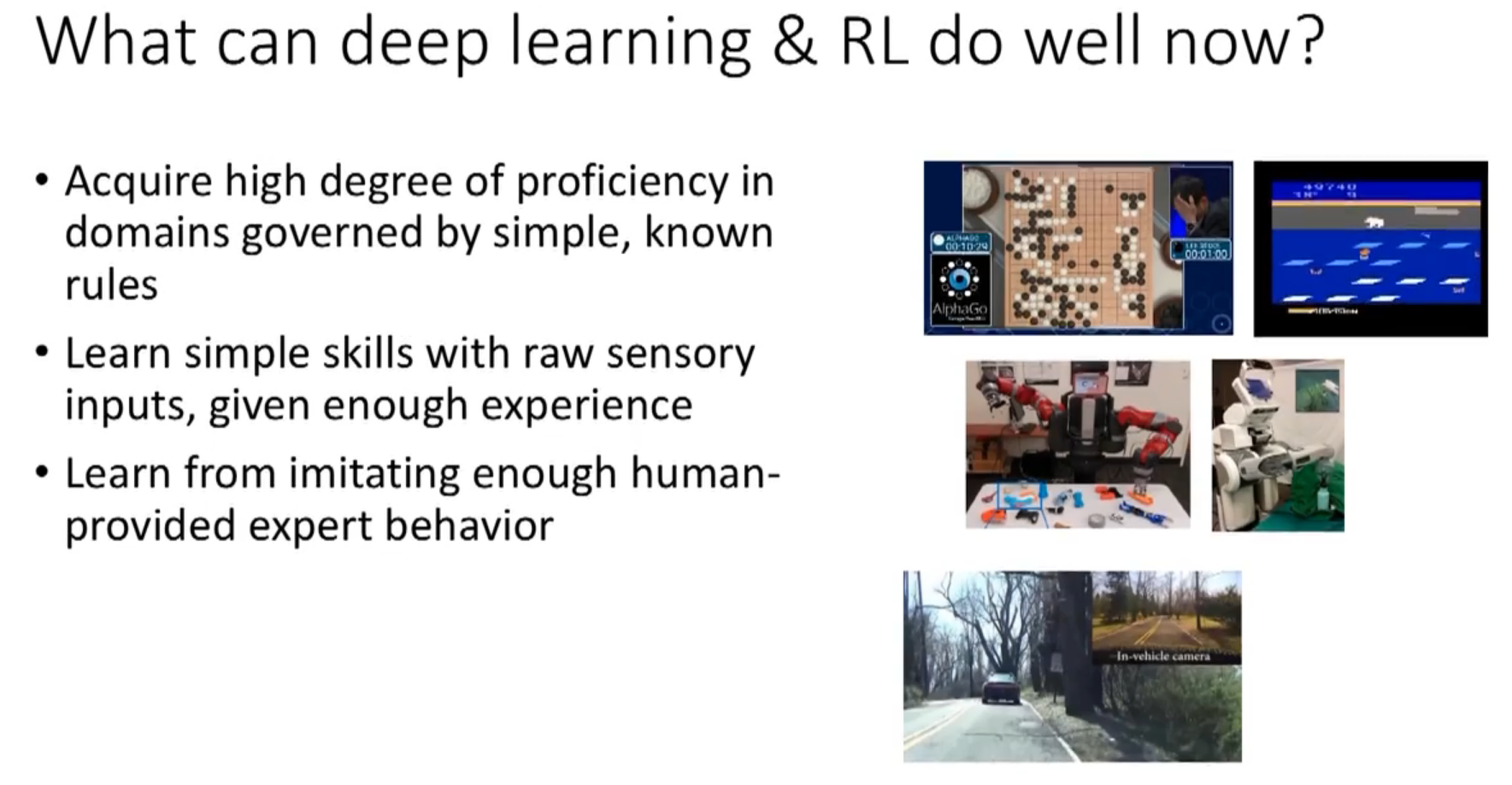
14 robot, sharing their own experience to each other

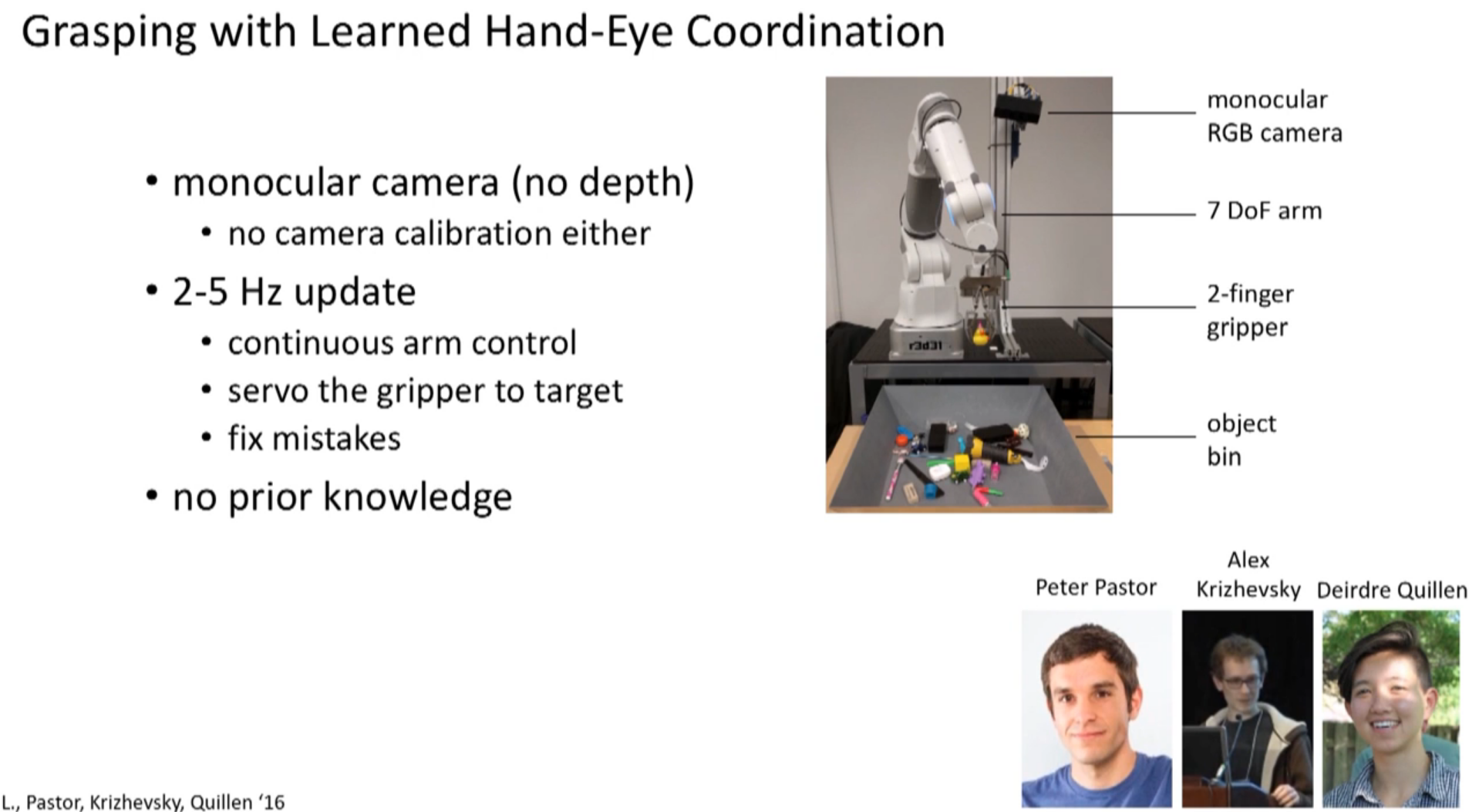

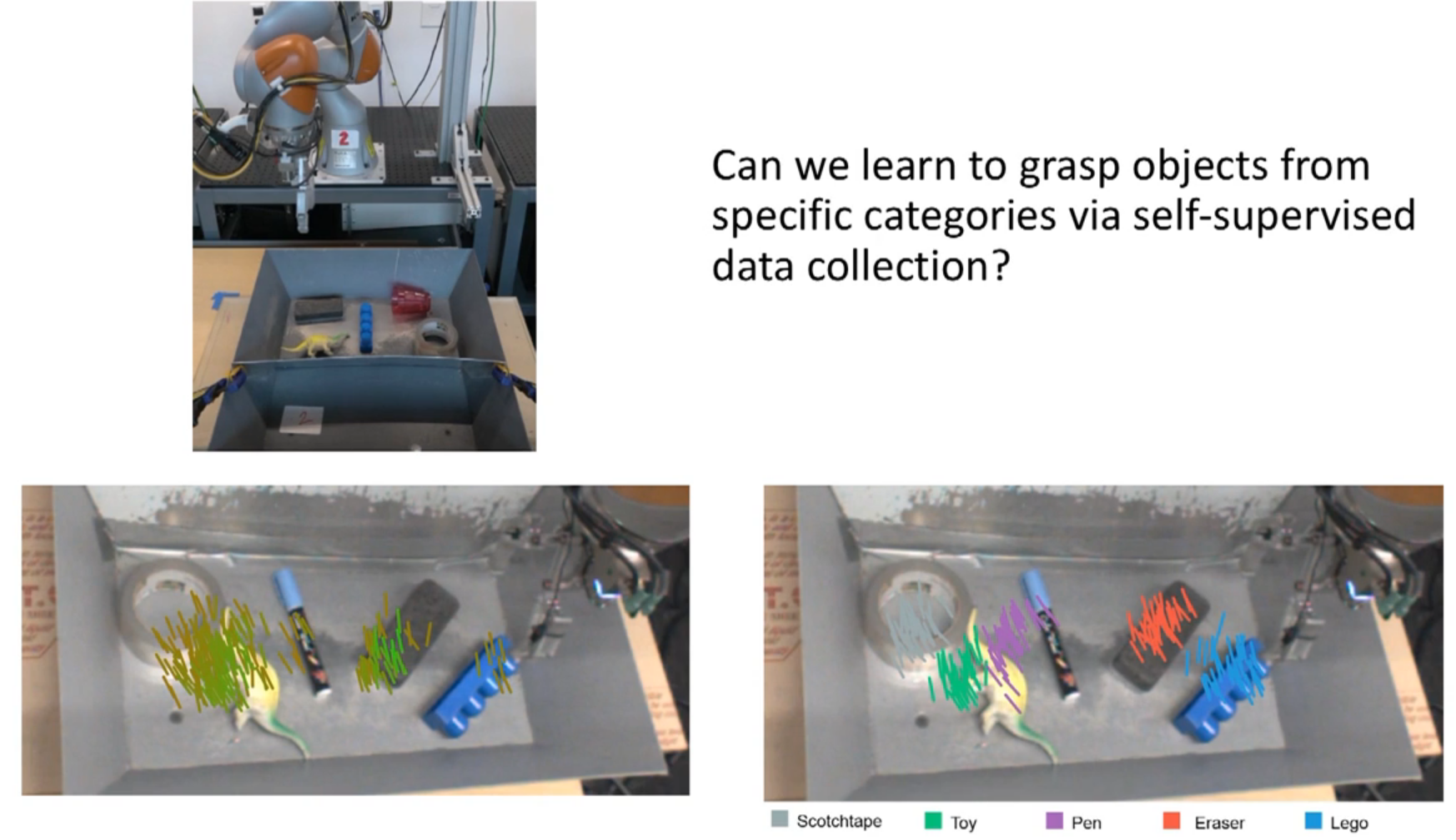
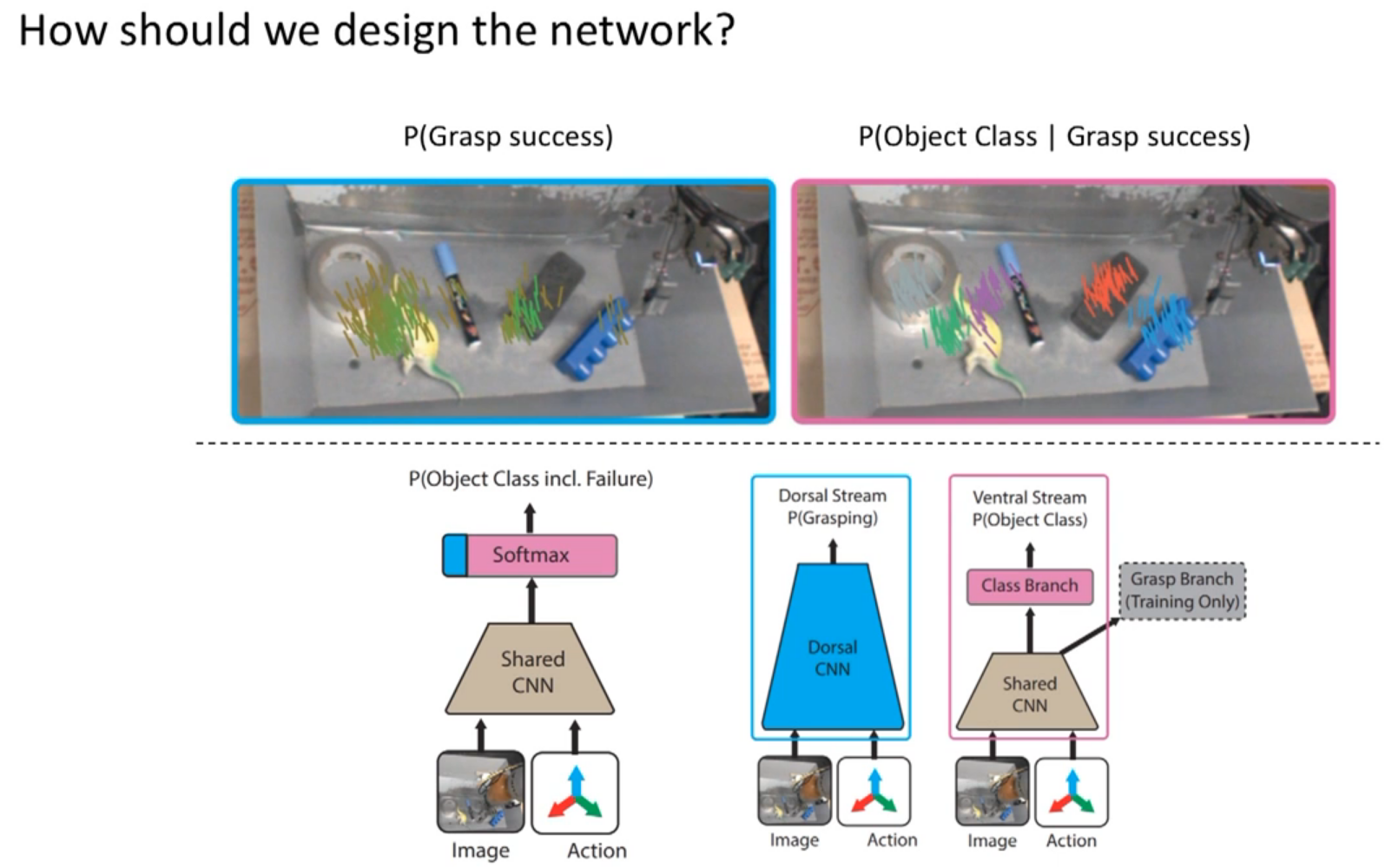
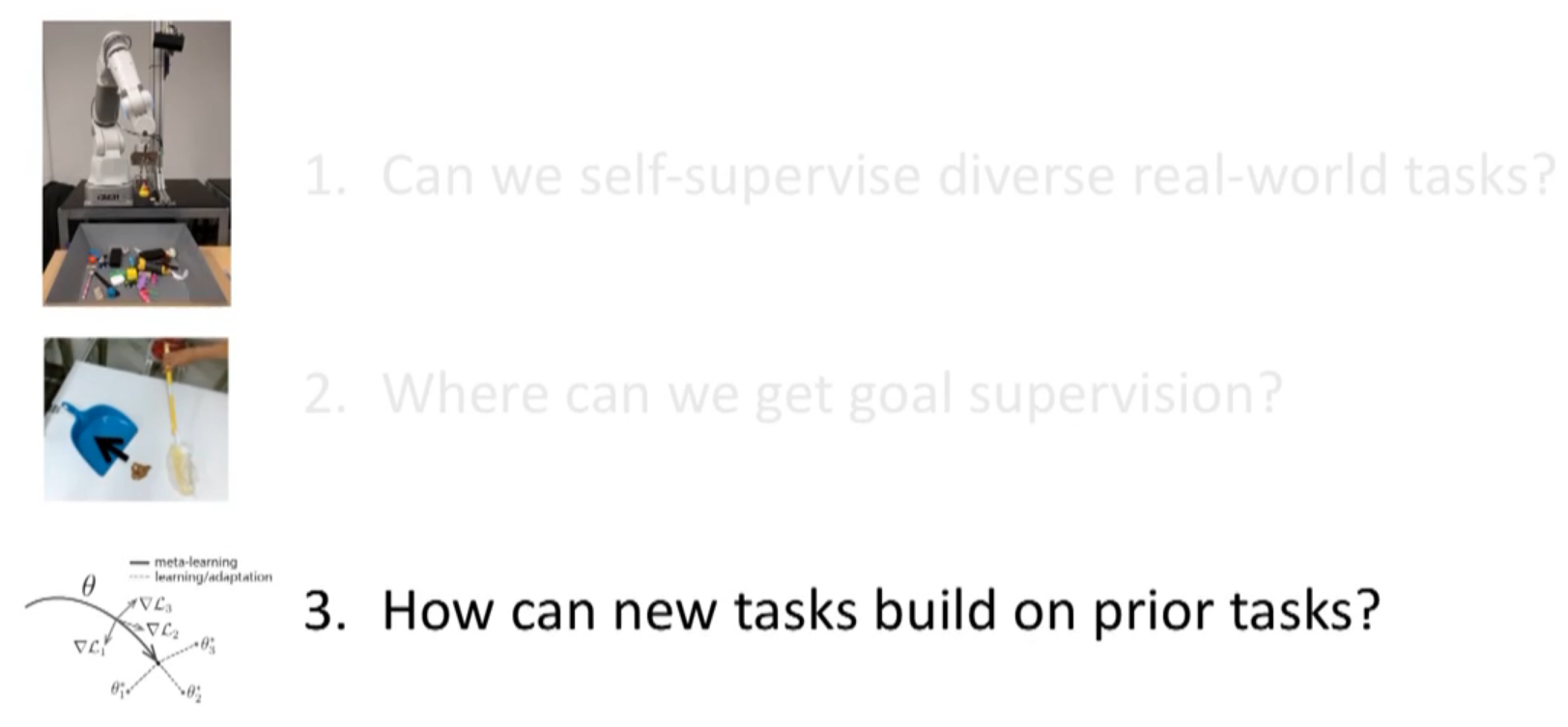
here the goal is to grasp anything. no task here






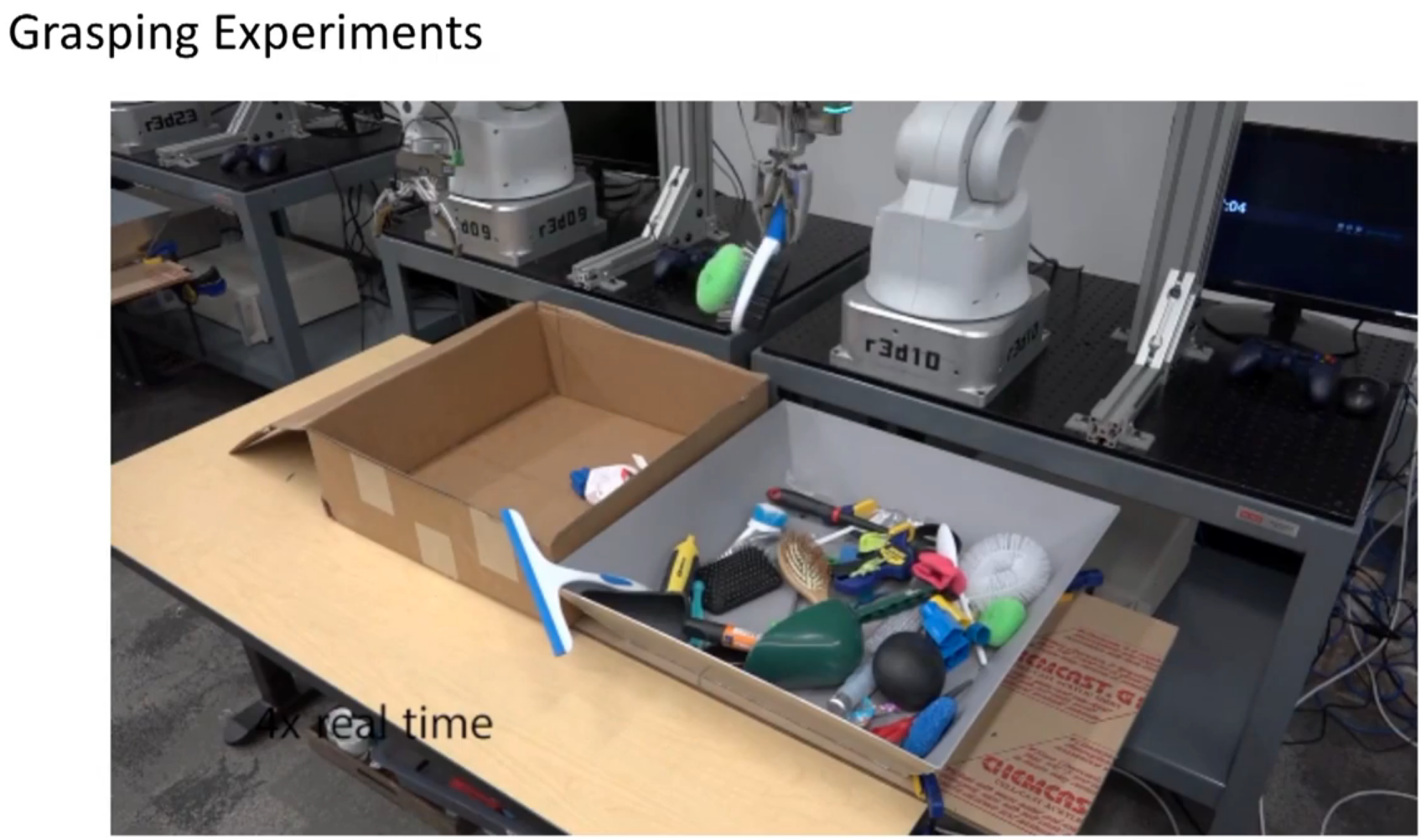
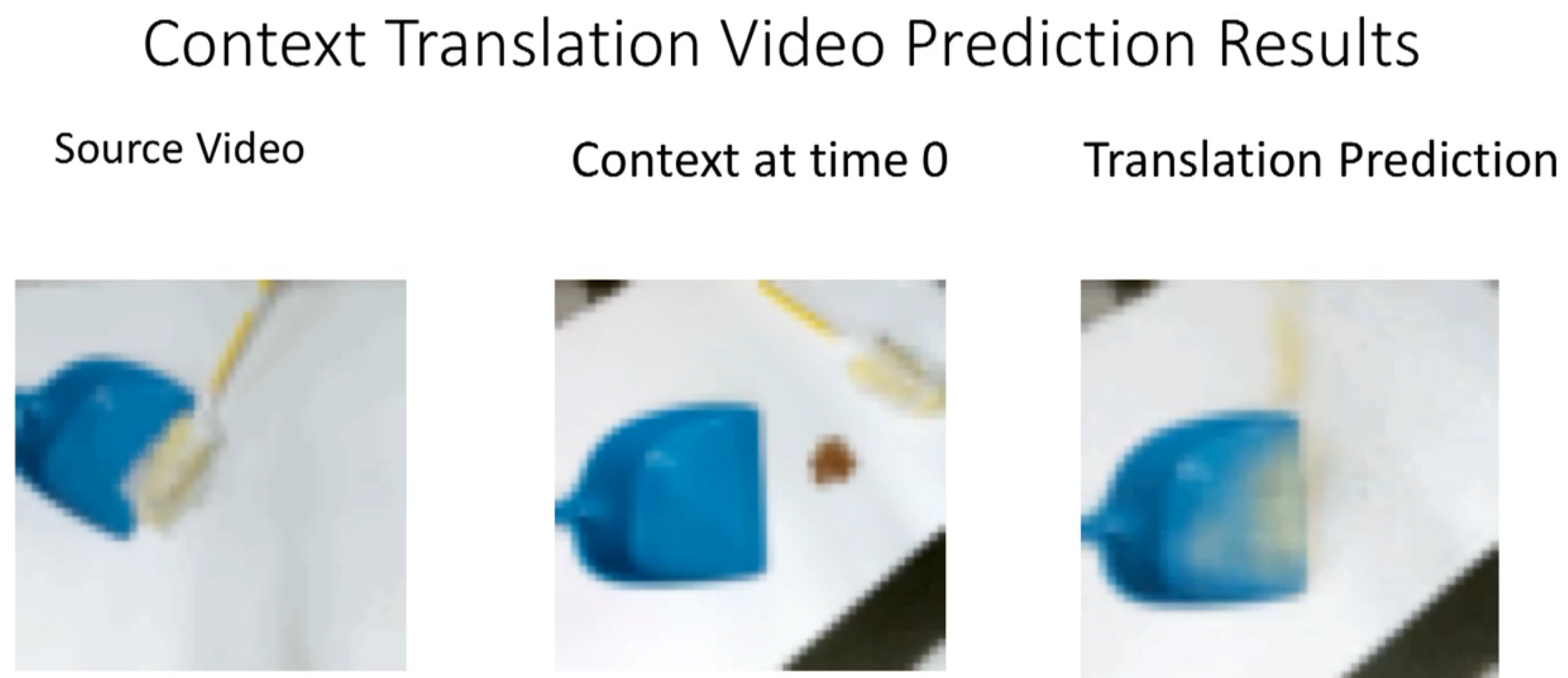
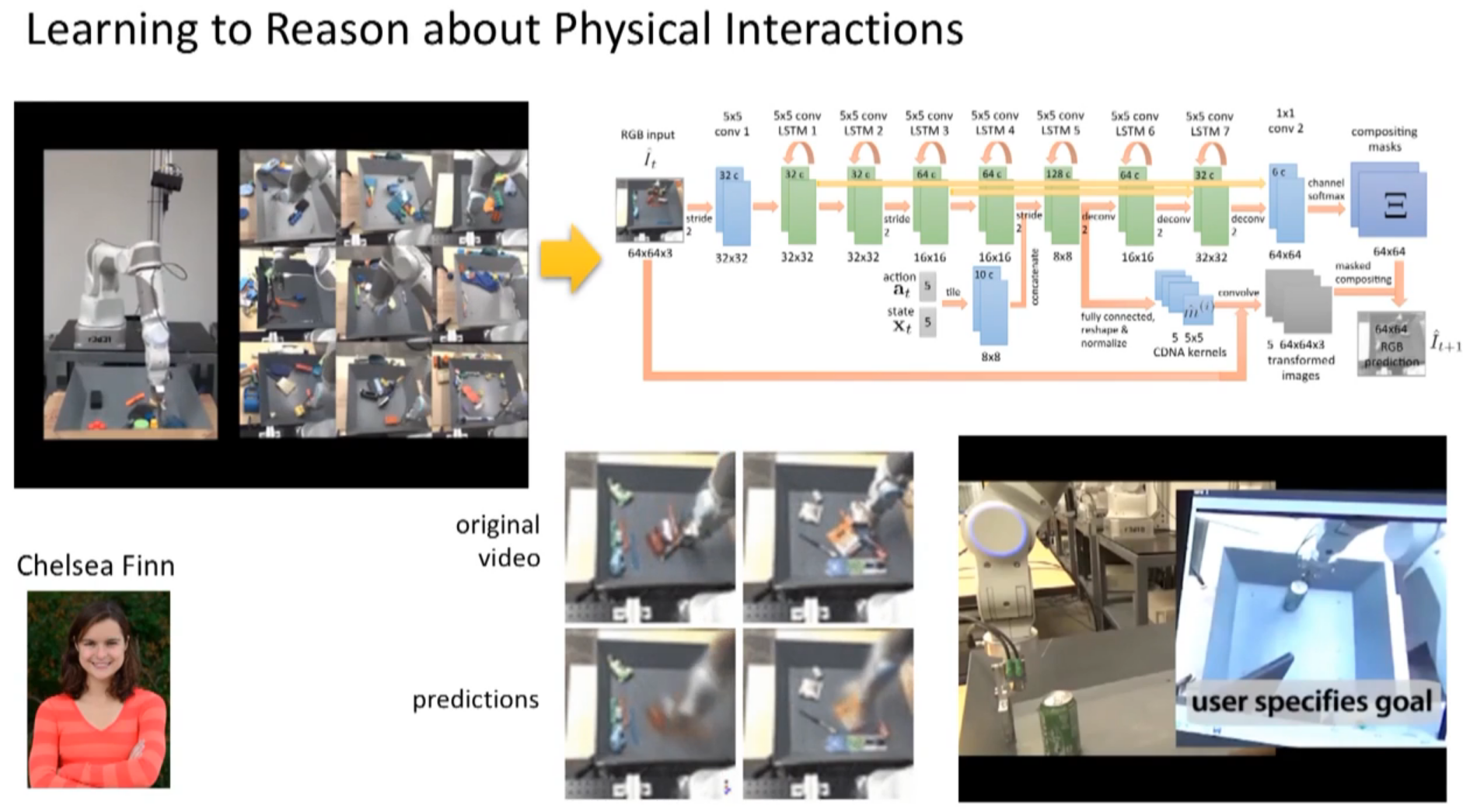
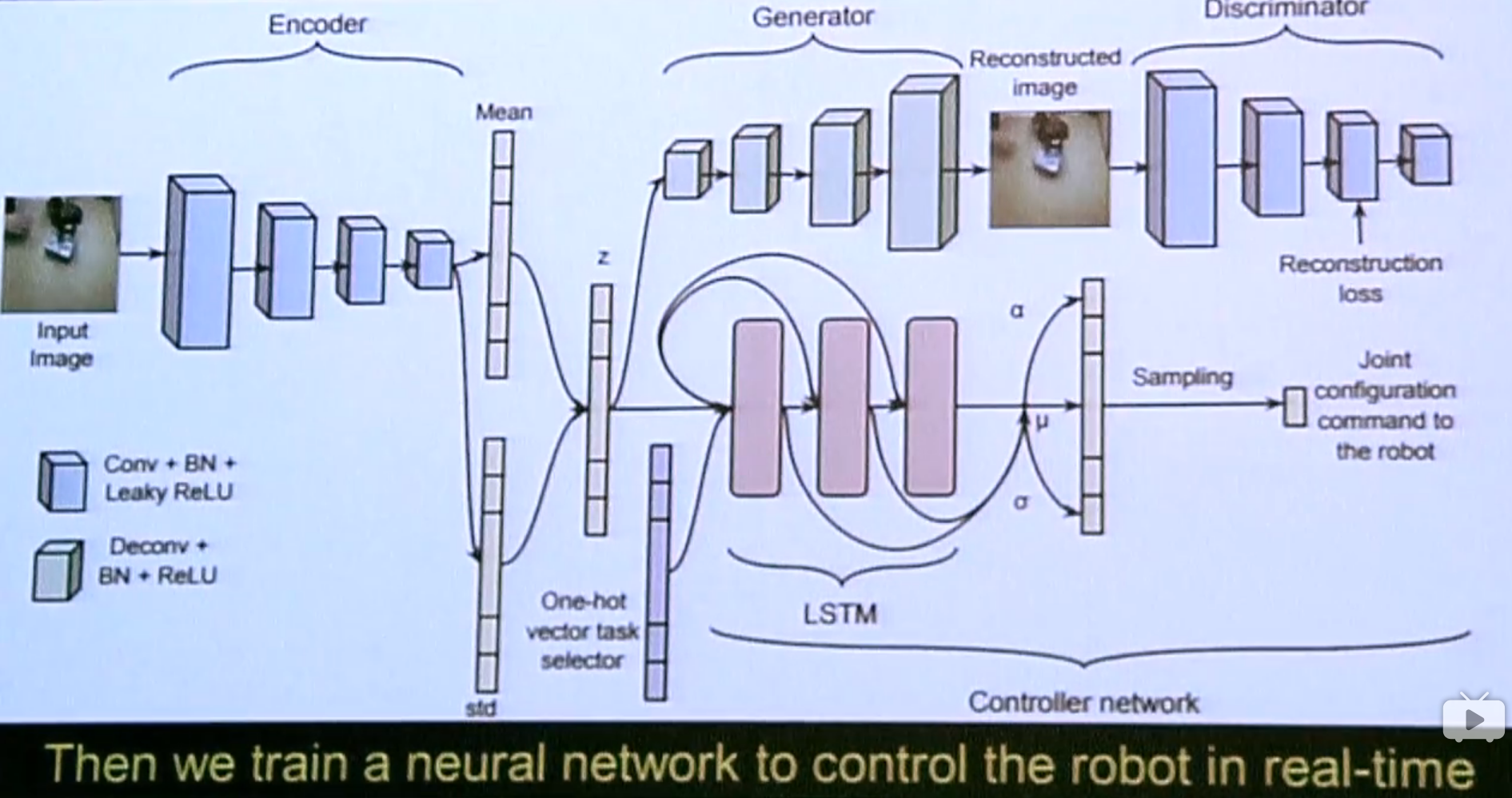
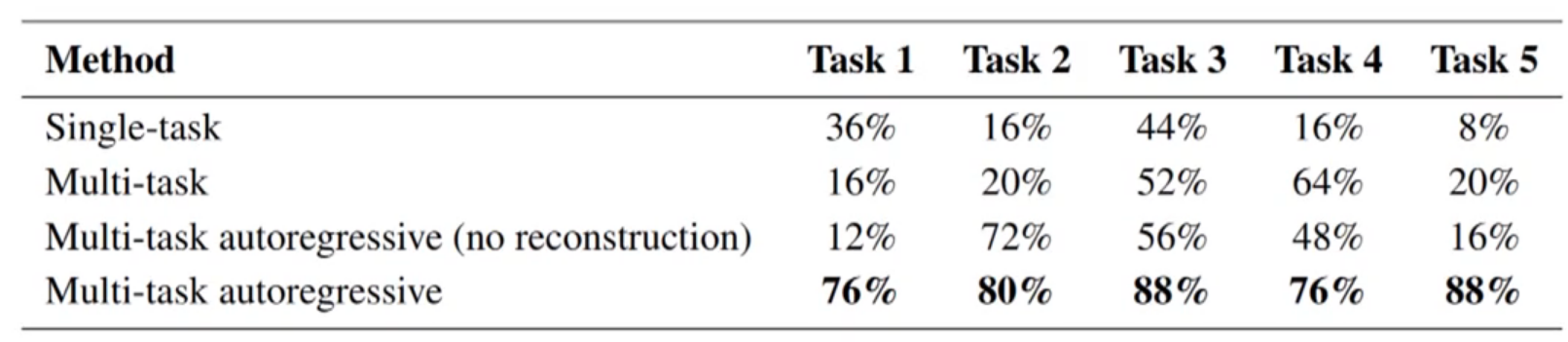
a few clips of our best trained neural network, picking up four objects that are visually kind of similar. They are all blue and roughly the same size, roughly rectangular.


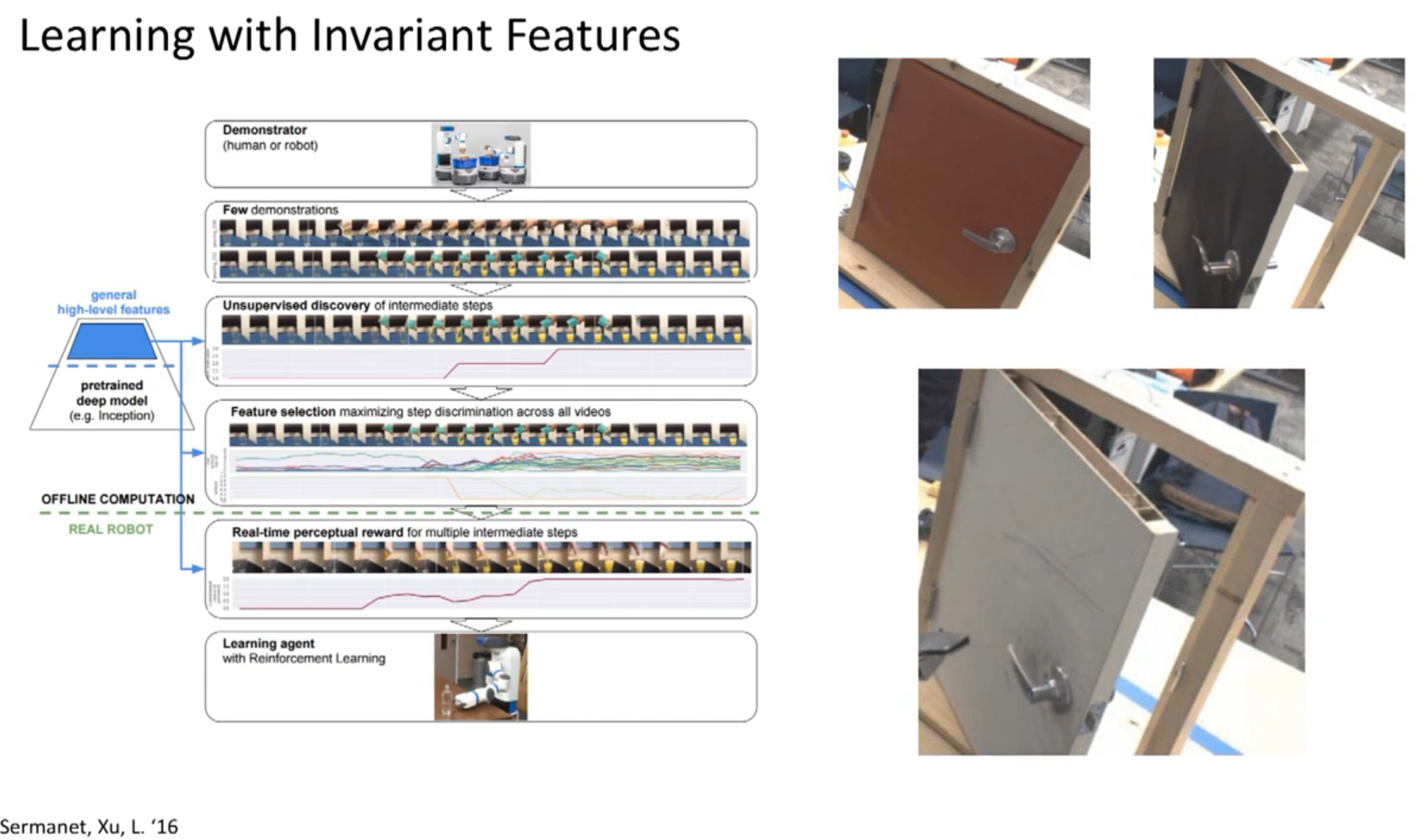
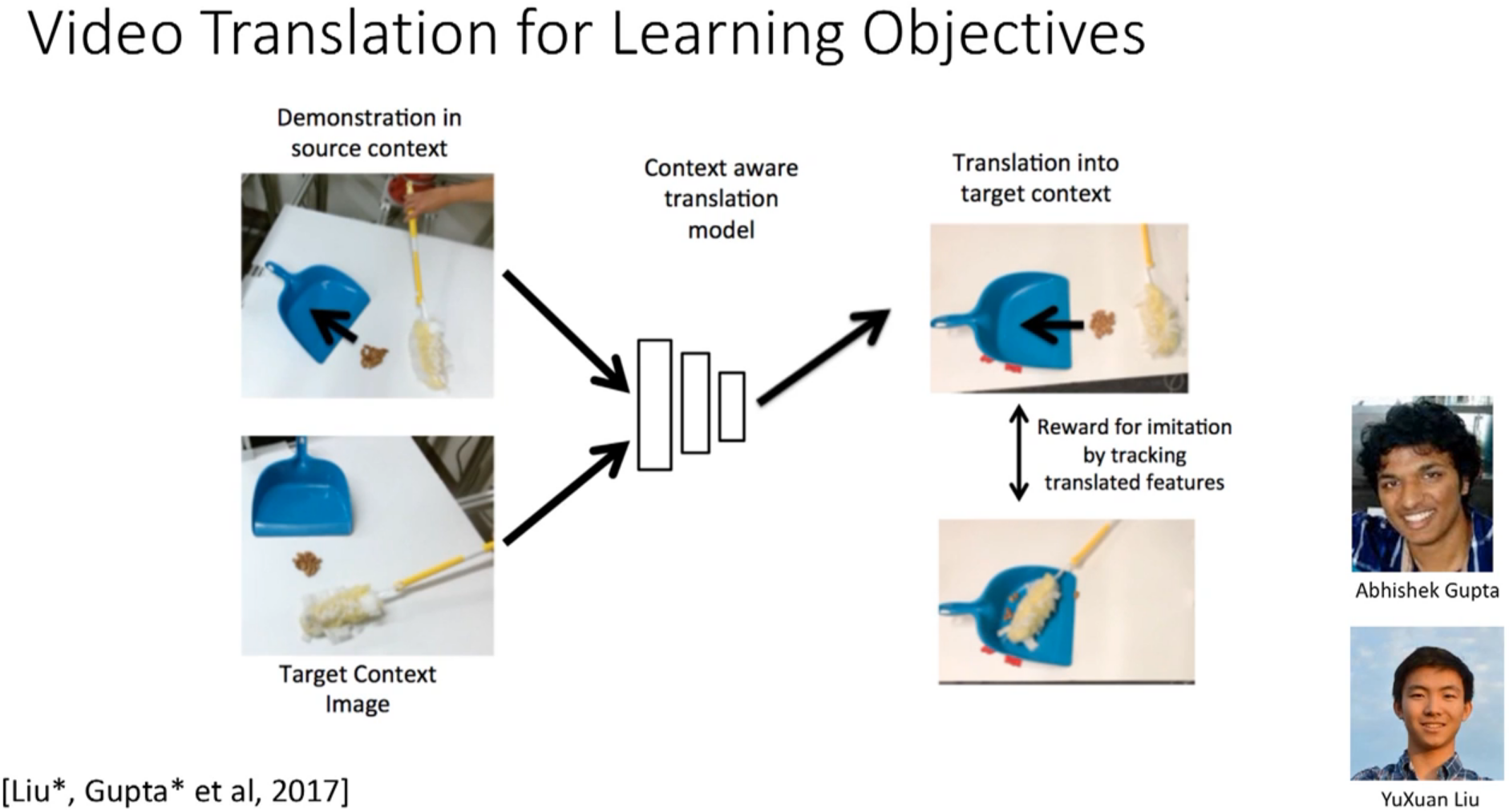

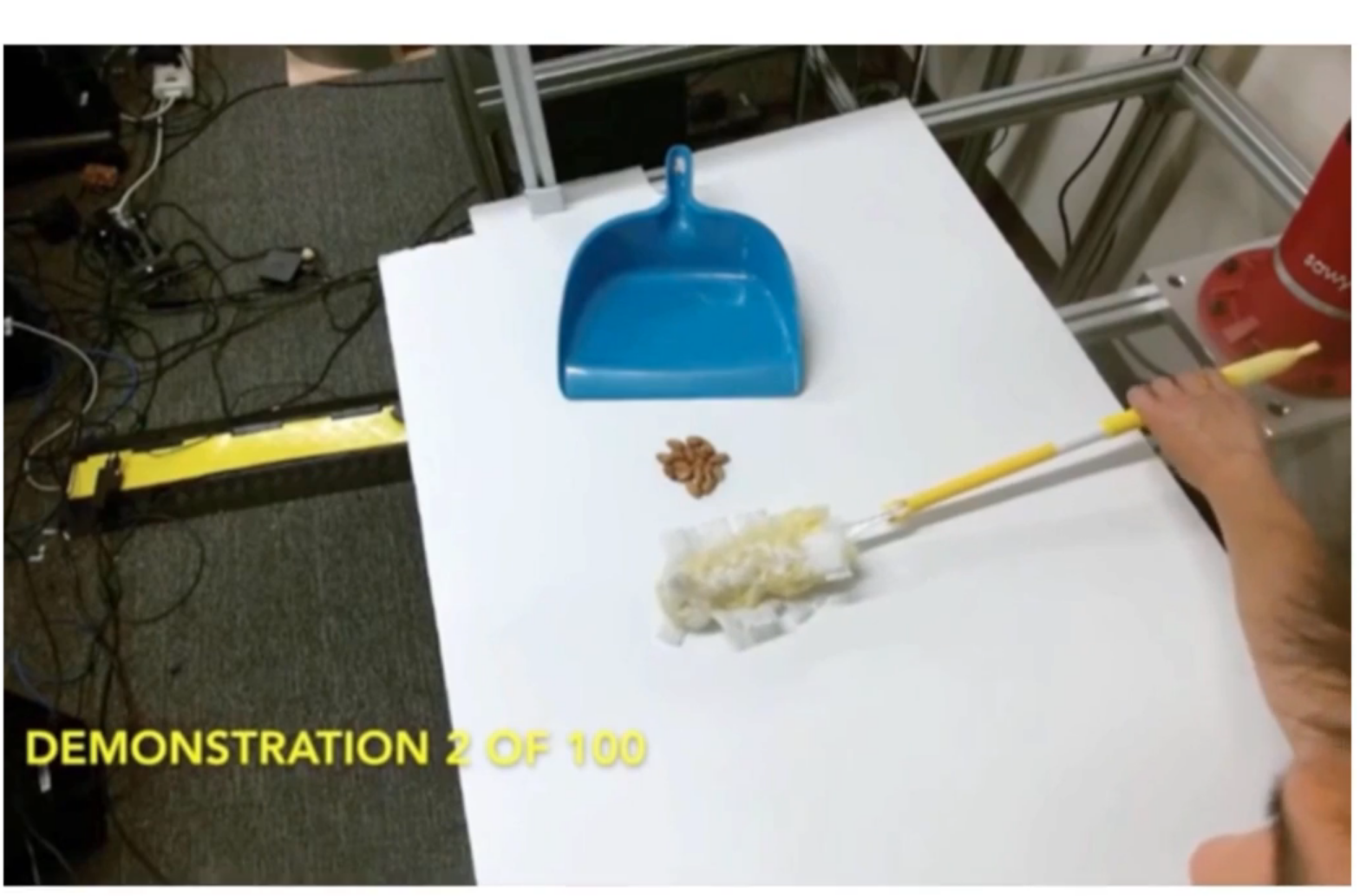


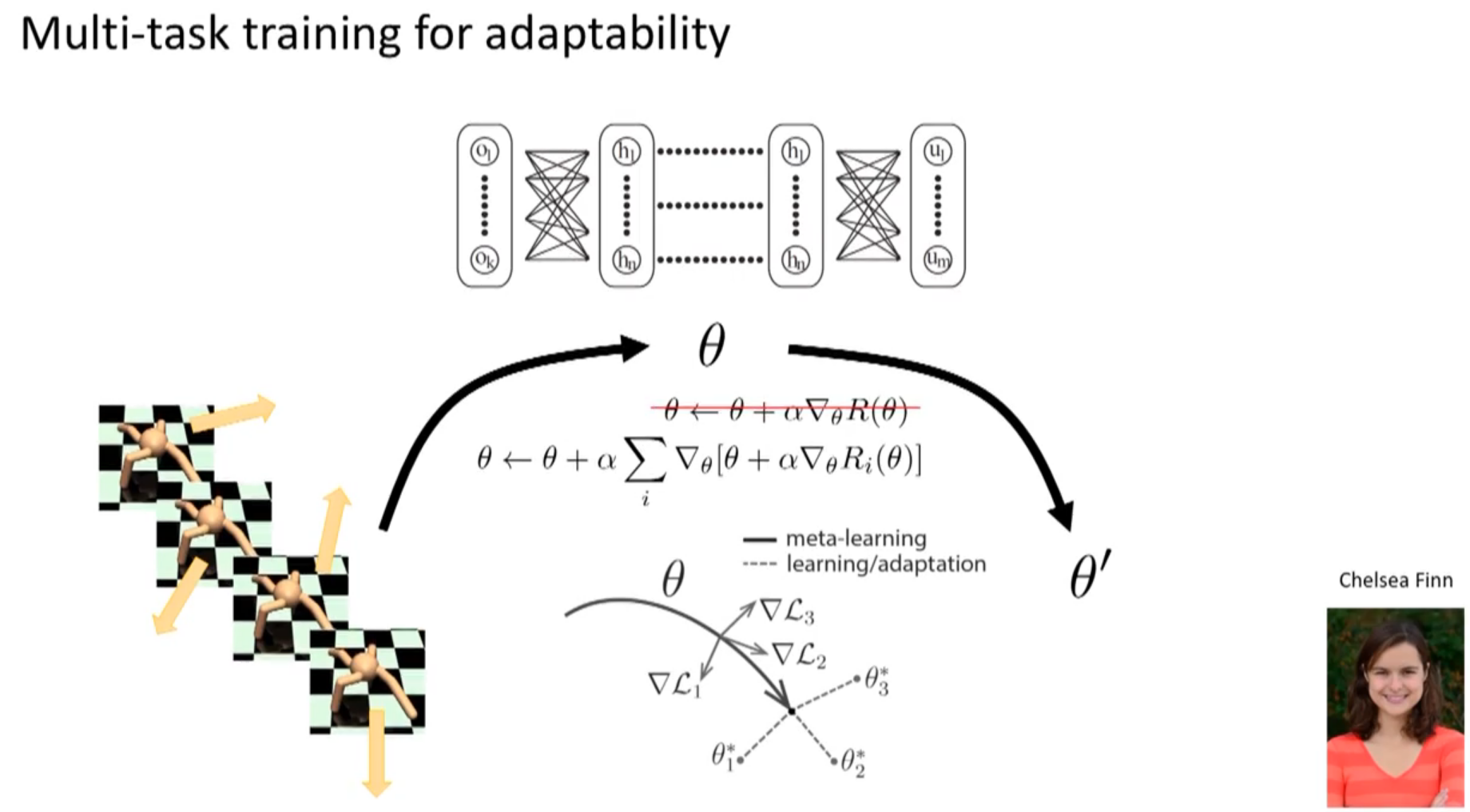
imitation learning
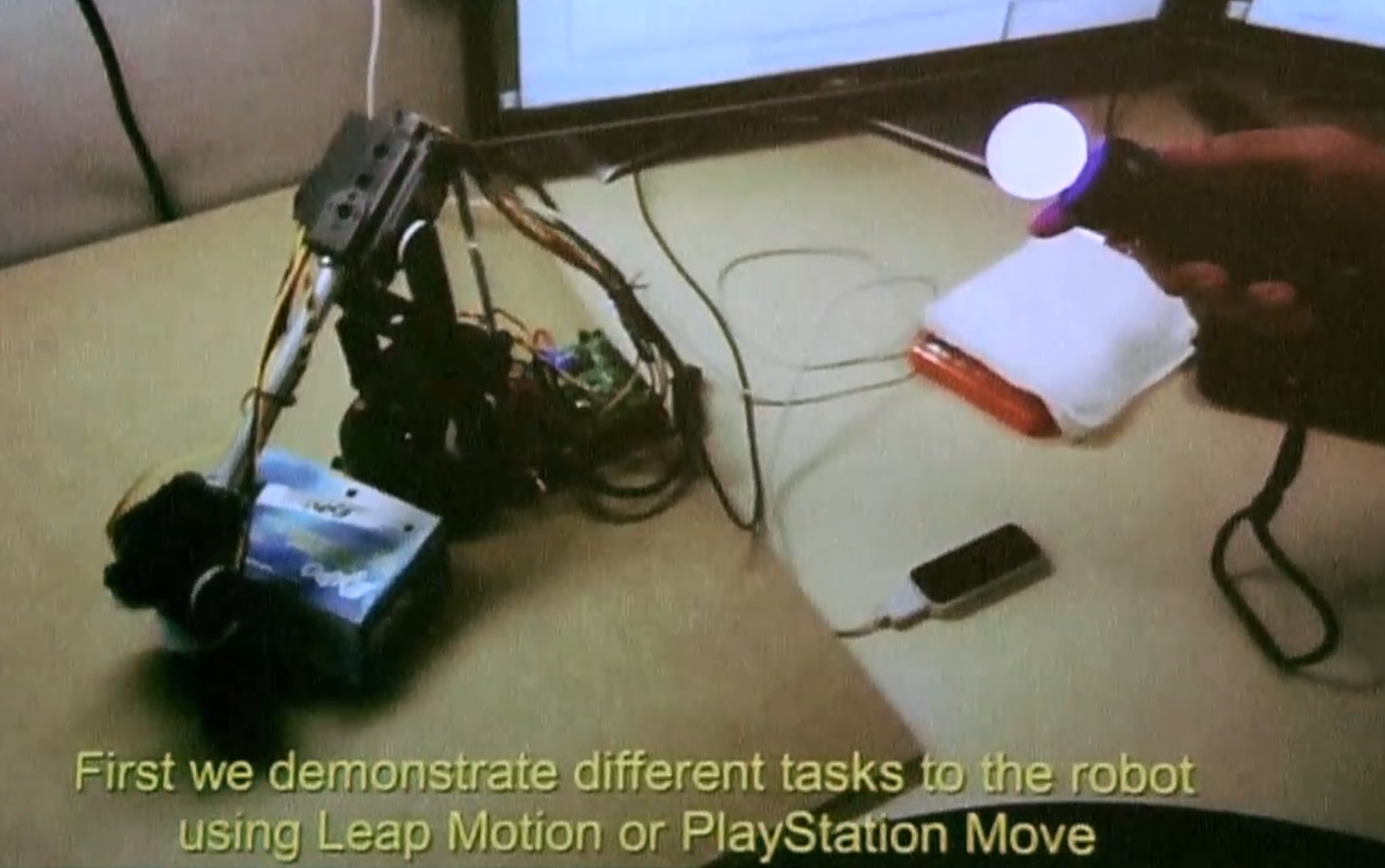


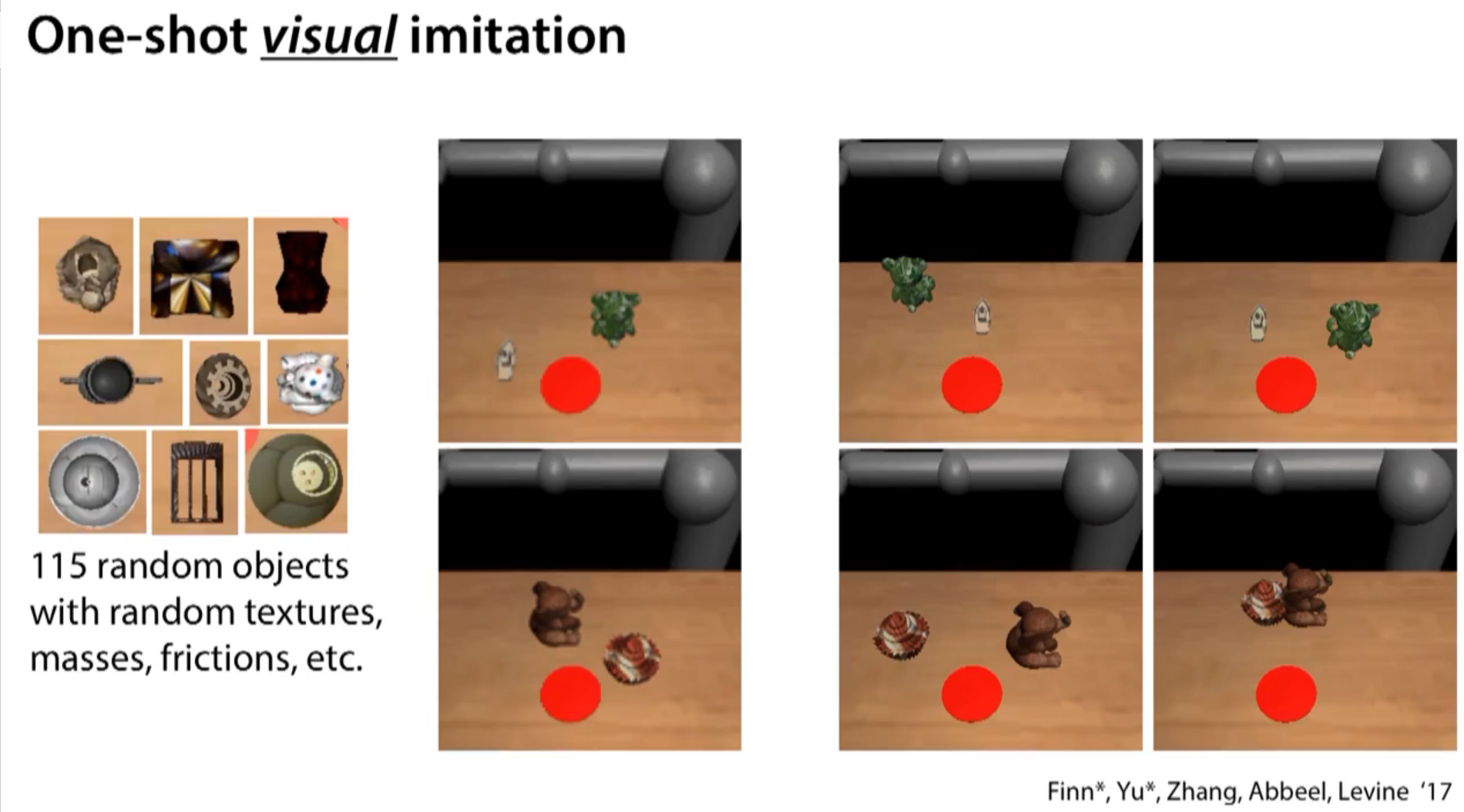
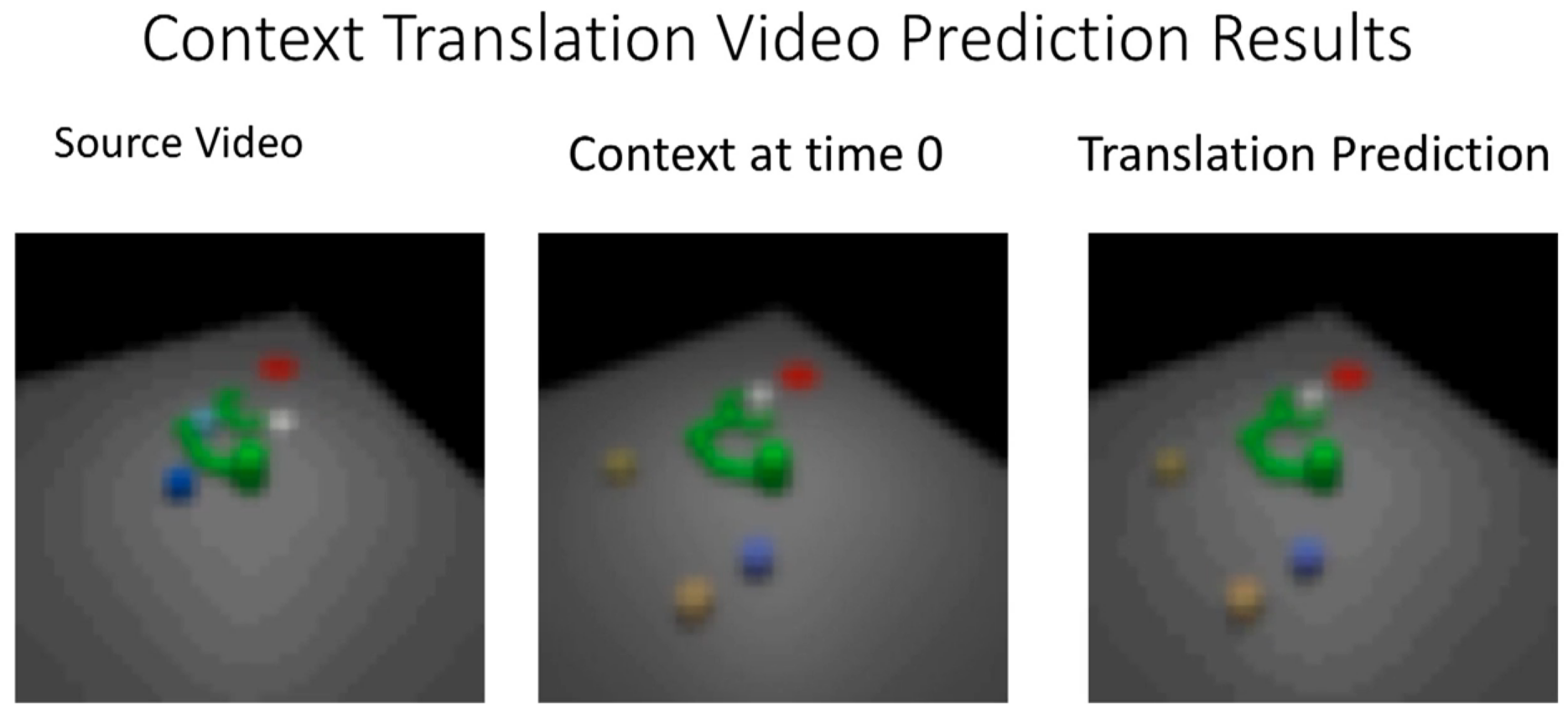
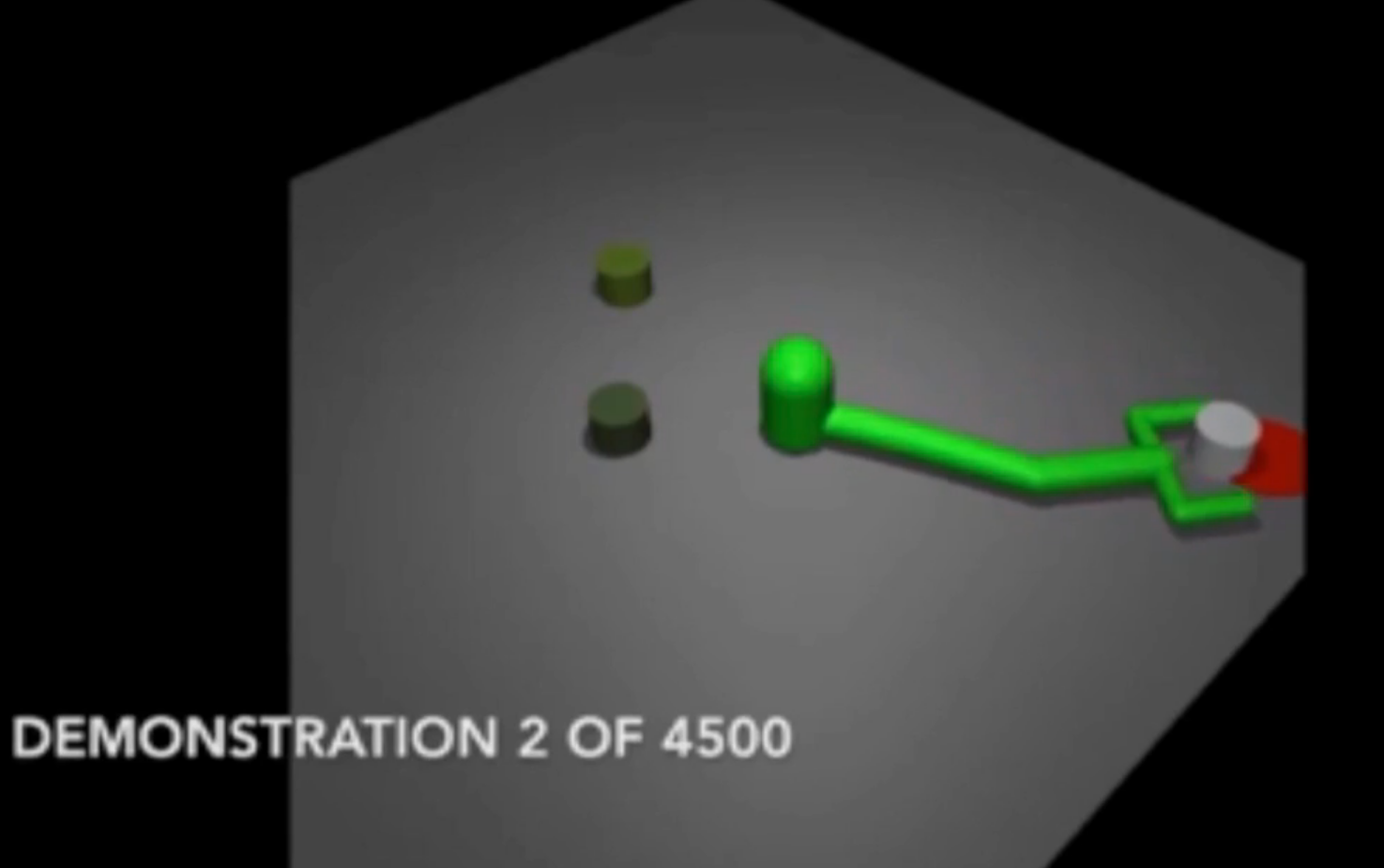
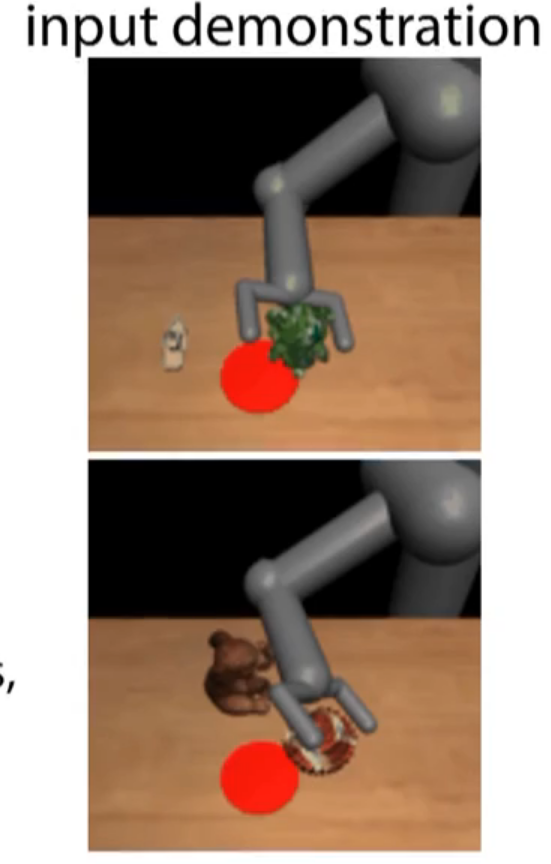 push the green tedy bear to the red spot
push the green tedy bear to the red spot





终于结束了,接下来需要
1,学习使用tensorflow和pytorch
2,对CNN、RNN、GAN动手实践,做项目
(大概需要20天)
3,学习基础的ML(大概需要4天)
4,学习raspberry pi和arduino(大概需要4天)