A



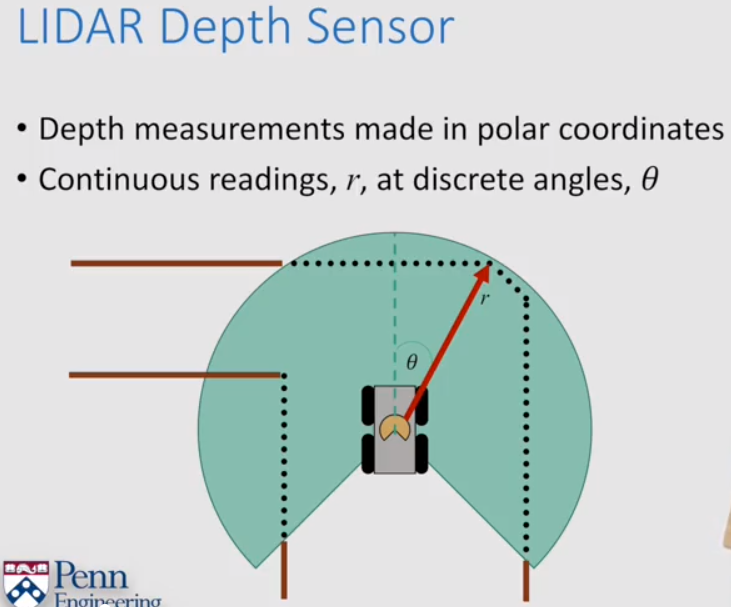
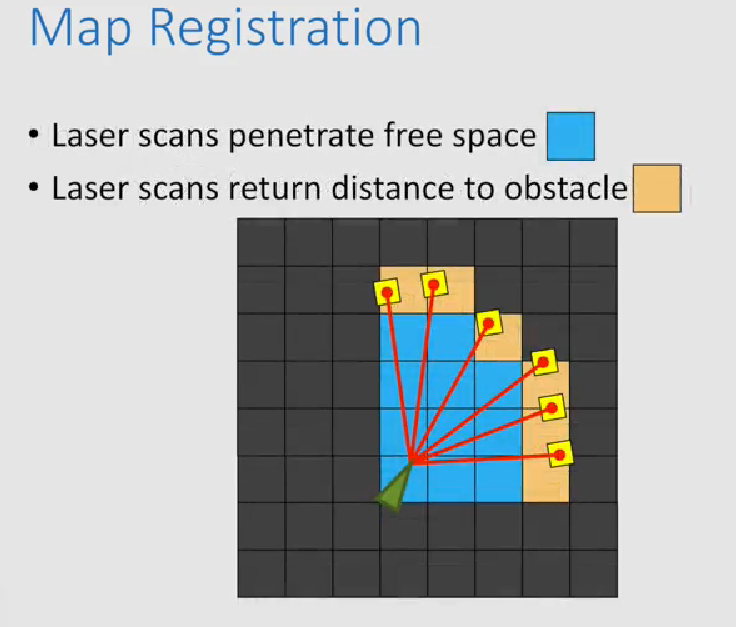
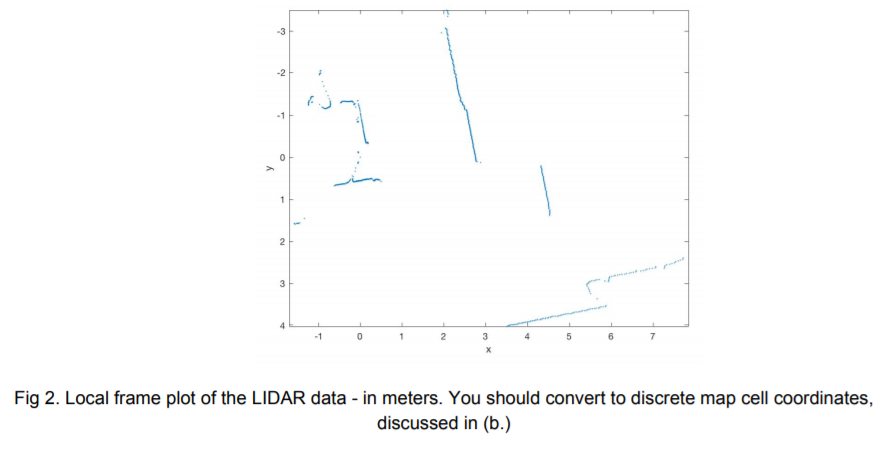
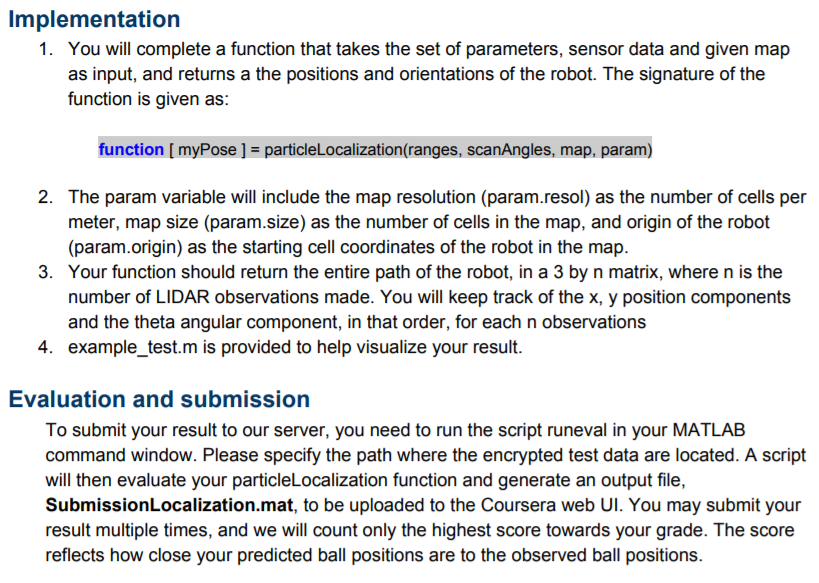
Here, theta encompasses 270 degrees, not a full circle.
The laser scanner can only see 10 to 30 meters away.
In this range restriction, means that distance measurements
showing here is black dots, can only be found within the area in green.
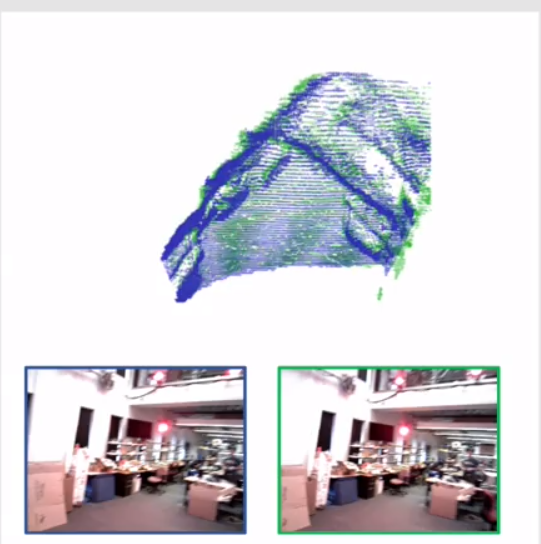
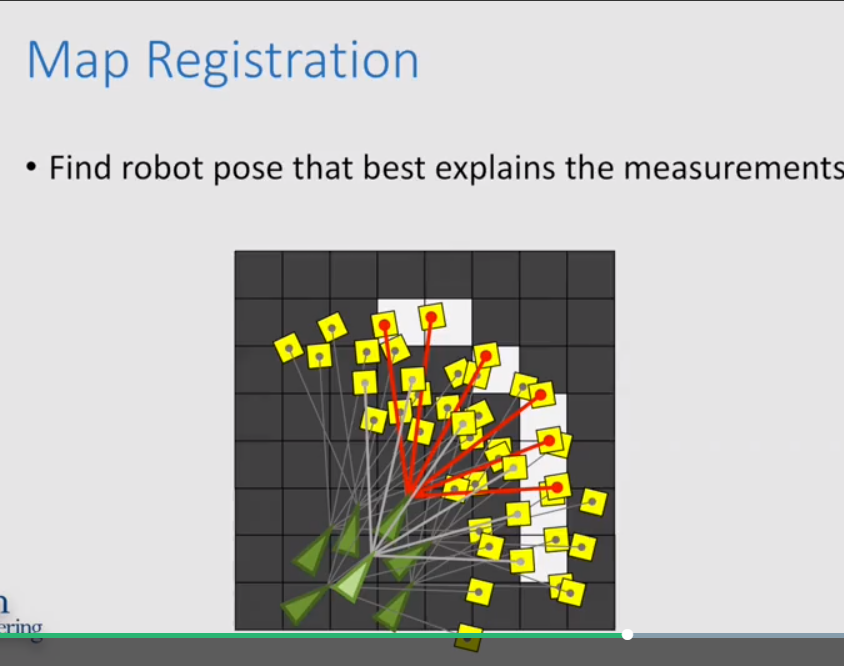
The complimentary stages of mapping and localization when performed together
are known as SLAM, simultaneous localization and
mapping, which is a major research topic in robotics.

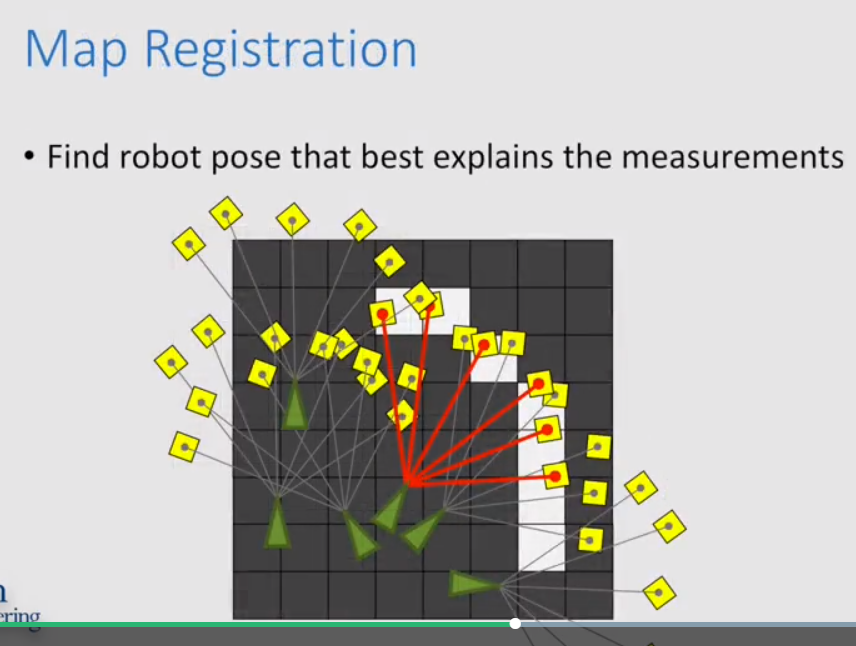
we have some tricks to make the search easier.
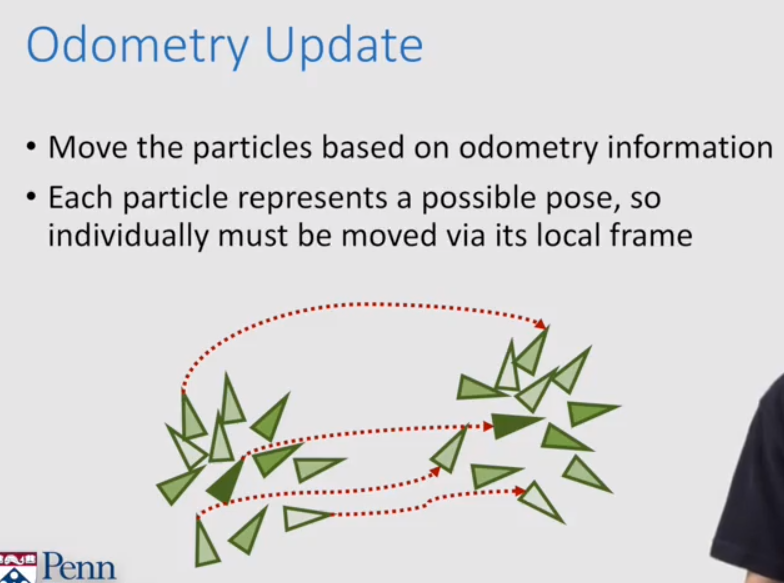
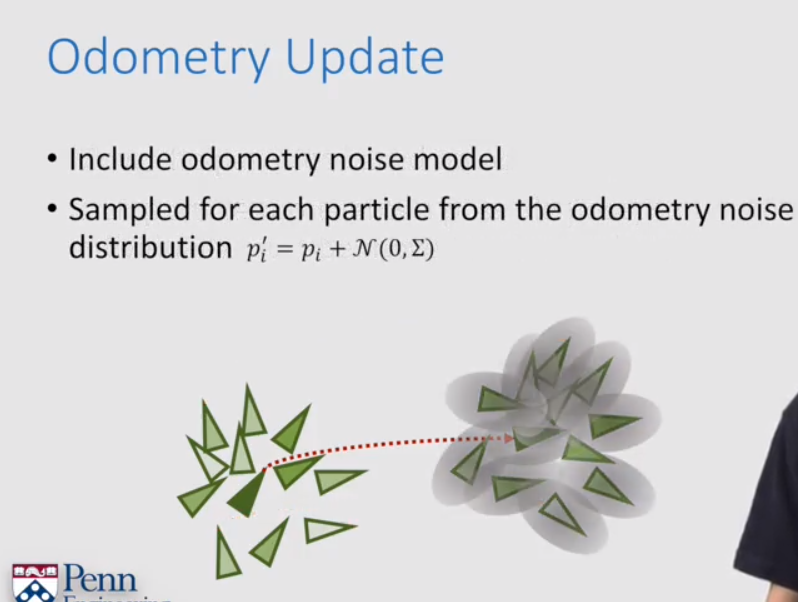
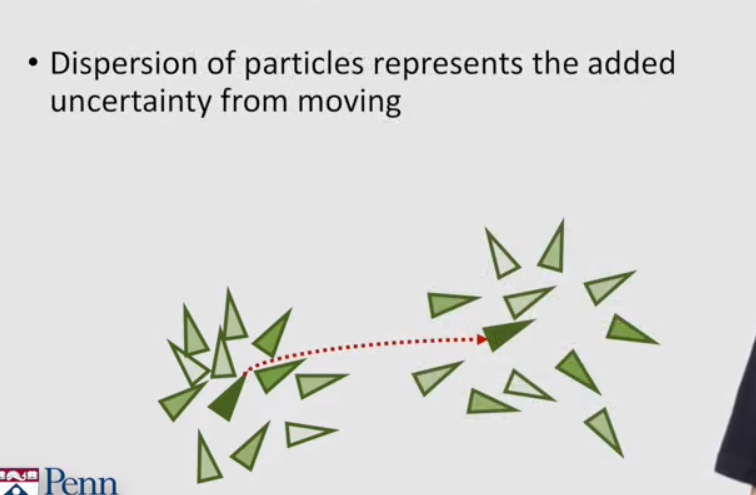
We can constrain the search to a limited number of poses based on odometry information.






http://www.cnblogs.com/maybe2030/p/5043356.html
https://blog.csdn.net/heyijia0327/article/details/40899819
https://www.cnblogs.com/21207-iHome/p/5237701.html

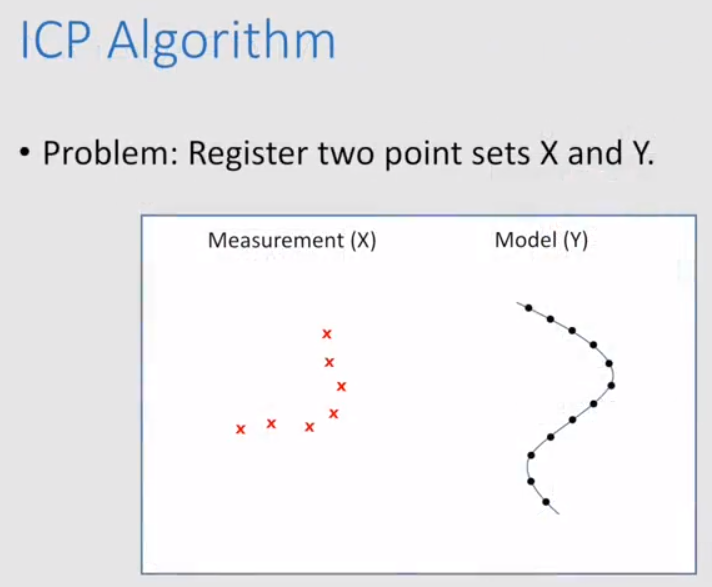
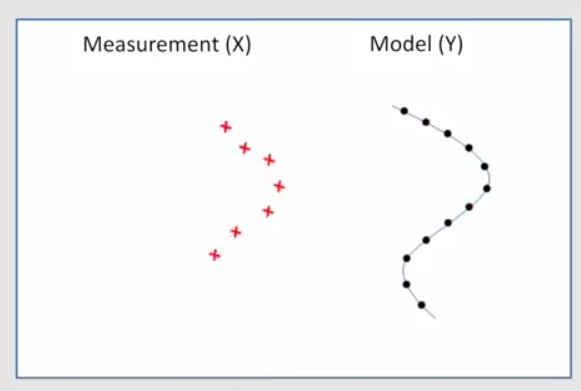
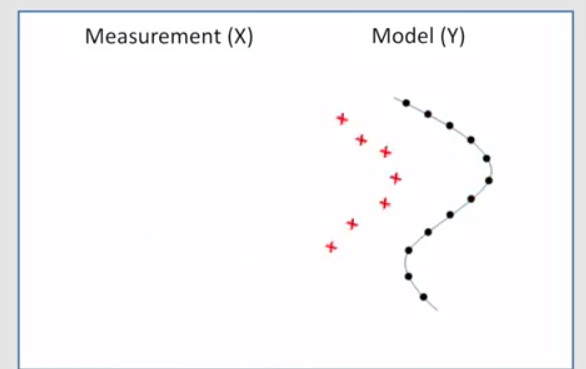
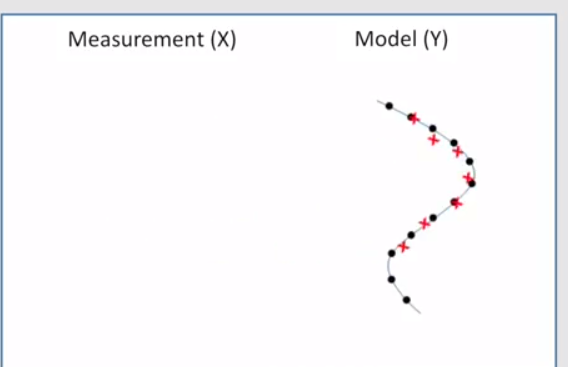
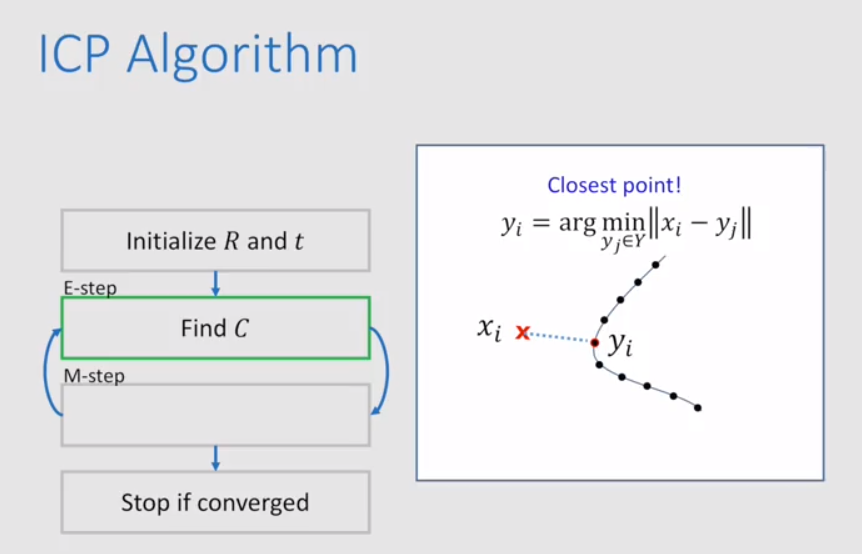
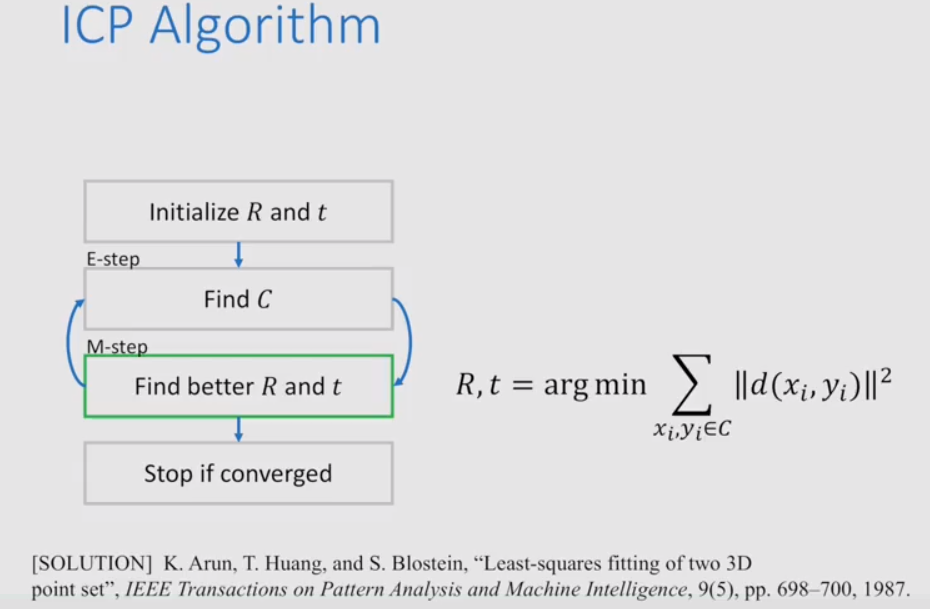
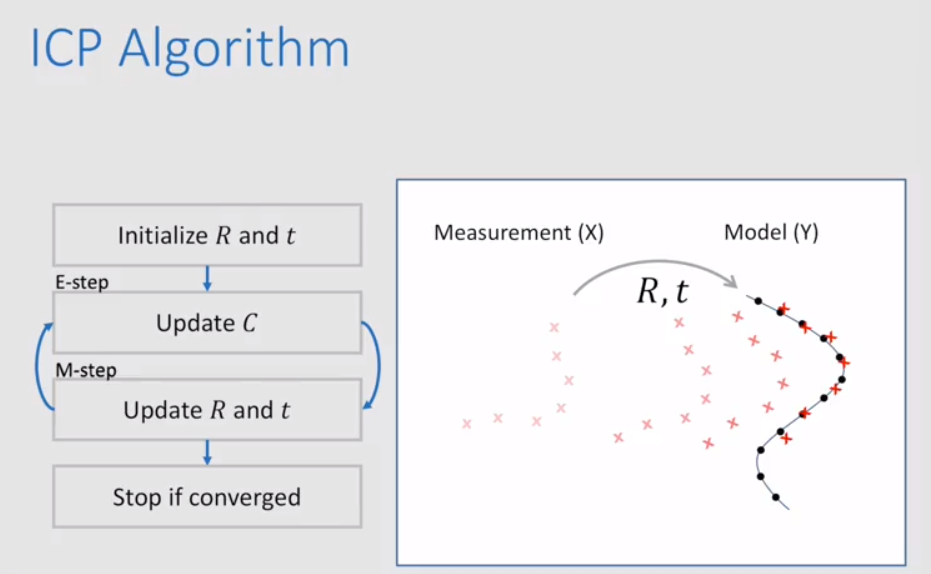
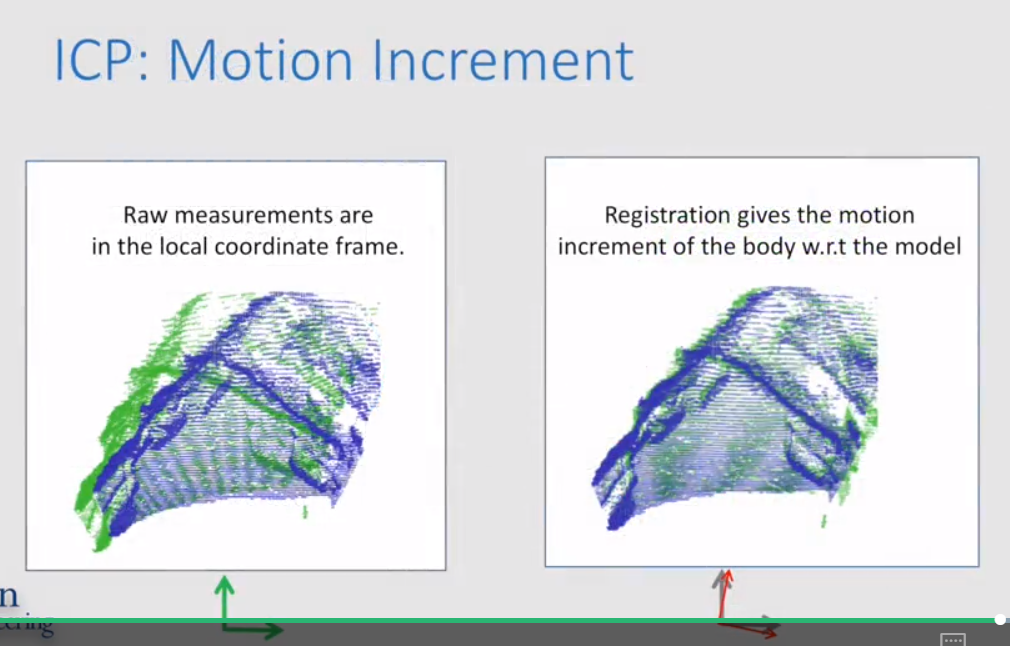
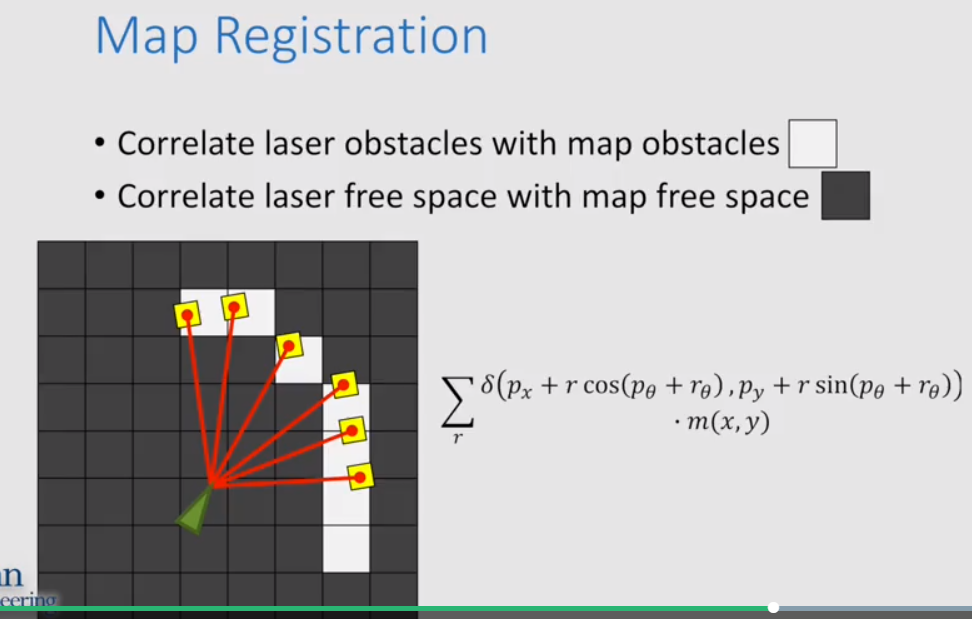
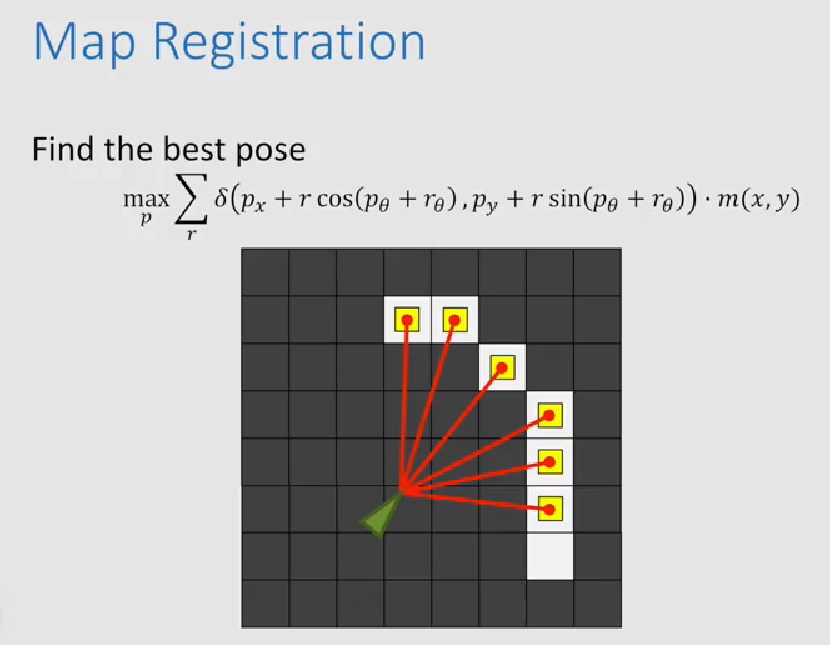
so, we need to find a rotation and translation that move the measured points to match the model points.
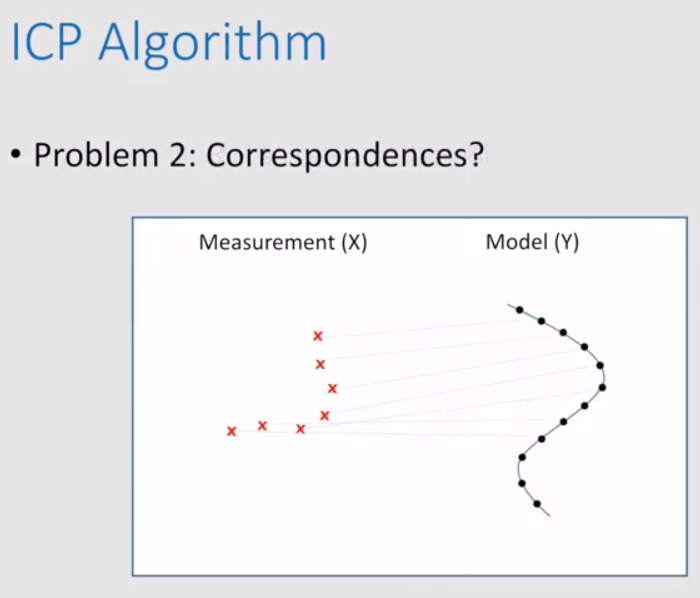
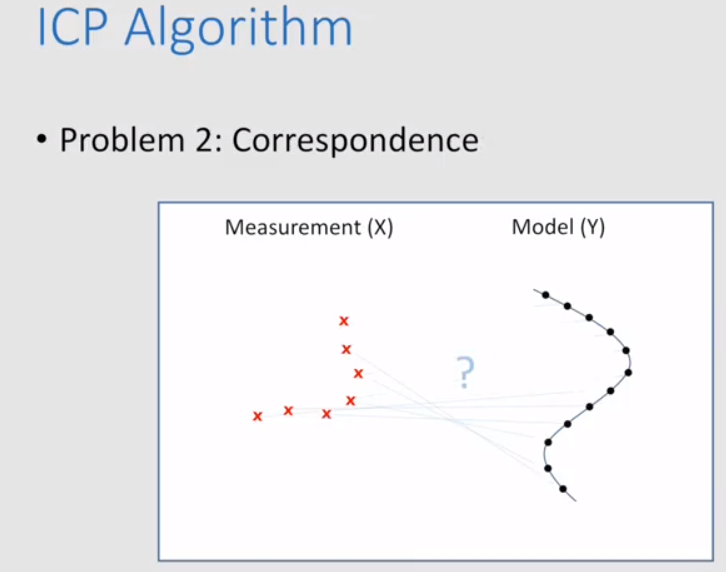
The strategy of the ICP algorithm takes an optimistic assumption that the point sets are close enough.