zoukankan
html css js c++ java
周末宅在家的结果---位恣整定
先声明本人大学非电子类专业的,仅仅是懂而以。
一直想做自平衡控制系统的实验,可惜没空。先
做了个位恣整定的实验。位恣指的是物体所处的空间
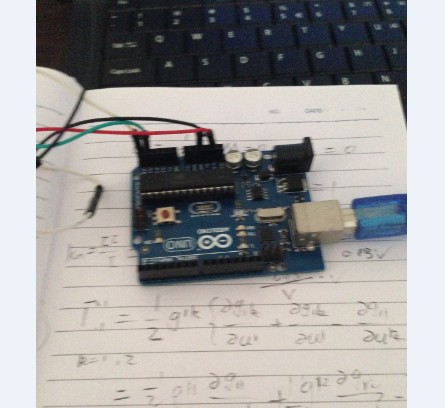
姿态,如飞机沿各个轴旋转的角度。实验用的控制器是
ardunio,陀螺仪用的是
L3G4200D用来测量角速度,通过
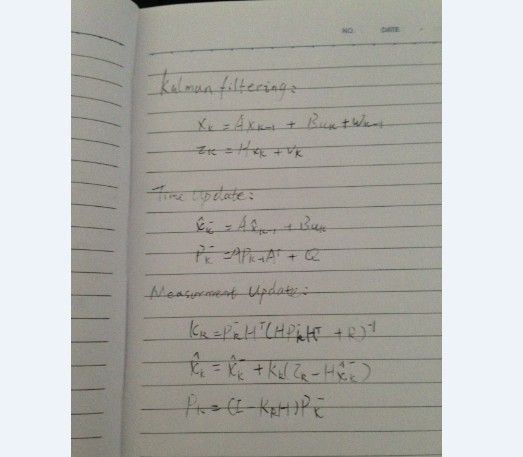
对角速度积分得到旋转的角度,用卡尔曼滤波器进行误差
修正。
卡尔曼滤波器在各种飞行器上得到广泛的应用,如
预测卫星下一时刻轨道位置。
查看全文
相关阅读:
java高并发
阿里网盘挂载到本地主机
frp突破内网ip限制教程
docker学习总结(流水线、redis集群、网络待)
git\svn提交记录规范
【寻径06】如何突破学习瓶颈学习笔记
leetcode 每日一题解题859. 亲密字符串
字符串格式的json字符串转换为json格式的字符串
如何使用github发布自己的静态项目
软考第一课总结考前介绍(1)
原文地址:https://www.cnblogs.com/einyboy/p/3390787.html
最新文章
1包,工具,基础类型
vm安装和安装linux
《机器学习项目开发实践》链接失效的新地址
多线程动态规划算法求解TSP(Traveling Salesman Problem) 并附C语言实现例程
Edison与Arduino通过USB对接通信
Office 365 共享链接直接进入编辑
Windows Sublime Text 配置Linux子系统(WSL)下的 gcc/g++ 编译环境
针对Integer的IntegerCache
decimal相关知识
杀死进程
热门文章
代码优化细节
idea快捷方式
sql中字符串与数字的比较坑
upuntu root登录桌面
ubuntu ssh 客户端远程链接
VUE 防止enter回车刷新页面
深度学习的二阶优化进展
WPS的PPT保存很慢问题解决
Rancher中的nginx.ingress.kubernetes.io/sslredirect 设置为false不生效的问题
leetcode 每日一题解题423. 从英文中重建数字
Copyright © 2011-2022 走看看