有关模糊pid的相关知识就把自己从刚接触到仿真出结果看到的大部分资料总结一下,以及一些自己的ps
以下未说明的都为转载内容
1.转自 https://blog.csdn.net/weixin_36340979/article/details/79168052
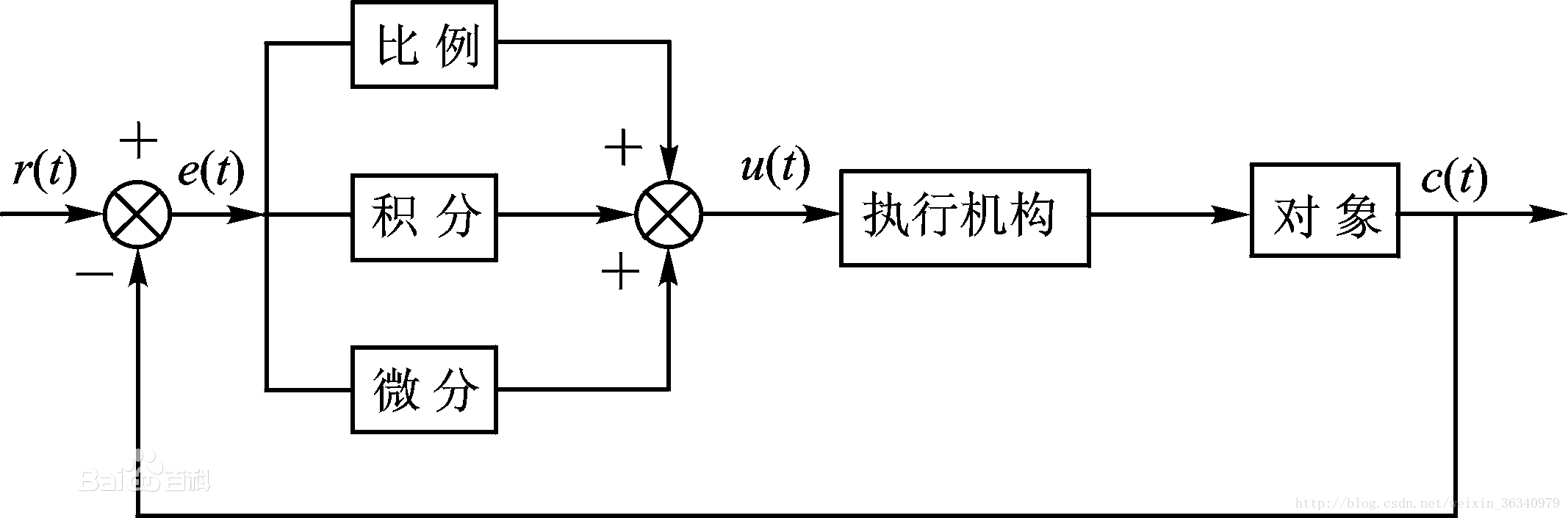
在讲解模糊PID前,我们先要了解PID控制器的原理(本文主要介绍模糊PID的运用,对PID控制器的原理不做详细介绍)。PID控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。
1.1传统PID控制
传统PID控制器自出现以来,凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制主要技术。当被控对象的结构和参数具有一定的不确定性,无法对其建立精确的模型时,采用PID控制技术尤为方便。PID控制原理简单、易于实现,但是其参数整定异常麻烦。对于小车的速度控制系统而言,由于其为时变非线性系统不同时刻需要选用不同的PID参数,采用传统的PID控制器,很难使整个运行过程具有较好的运行效果。
1.2模糊PID控制
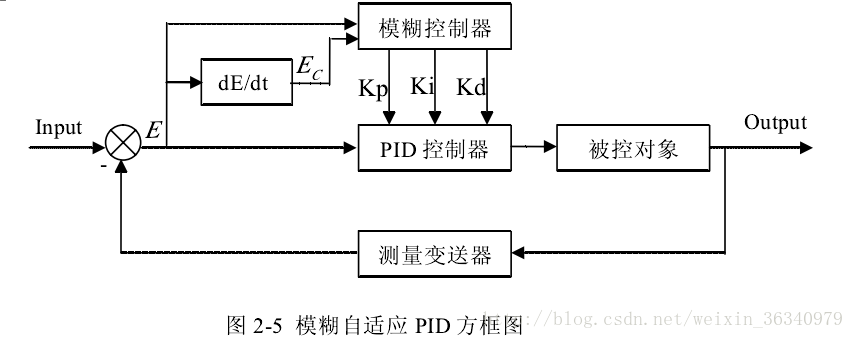
模糊PID控制,即利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时的优化,以克服传统PID参数无法实时调整PID参数的缺点。模糊PID控制包括模糊化,确定模糊规则,解模糊等组成部分。小车通过传感器采集赛道信息,确定当前距赛道中线的偏差E以及当前偏差和上次偏差的变化ec,根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制参数。
2.1模糊化
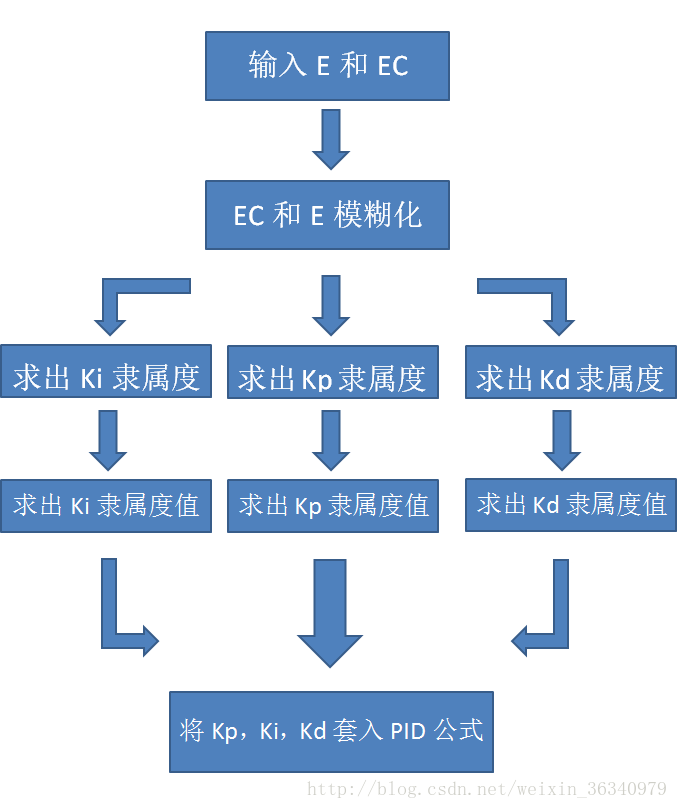
模糊控制器主要由三个模块组成:模糊化,模糊推理,清晰化。具体如下图所示。而我们将一步步讲解如何将模糊PID算法运用到智能车上。(最好用笔一步步自己写一遍!!!)

首先我们的智能车会采集到赛道的相关数据,例如摄像头车,其采集到的数据经过算法处理之后会得到与中线的偏差E,以及当前偏差和上次偏差的变化(差值)EC两个值(即此算法为2维输入,同理也可以是1维和3维,但2维更适合智能车)。例如此时车偏离中线的距离为150,而上一时刻偏离中线的距离为120,则E为150,EC为150 - 120 = 30。
其次我们要对这两个值进行模糊化。这里我们对E进行举例。摄像头车采集回来的E是有范围的,即与中线的偏差是在一个区间内可行的。在这里我们假设该区间为-240到240,即小车偏离中线的最大距离为240,正负即为左右。再假设中线偏差变化率的可行区间为-40到+40。
接着我们要对这两个值进行模糊化。我现在将E的区间(-240 到 240)分成8个部分,那么他们分别为-240 ~ -180,-180 ~ -120 ,-120 ~ -60,-60 ~ 0,0 ~ 60,60 ~ 120,120 ~ 180,180 ~ 240。然后我们把-180,-120,-60,0,60,120,180分别用NB,NM,NS,ZO,PS,PM,PB表示(个人理解N为negative,P为positive,B为big,M为middle,S为small,ZO为zero)。例如,当E = 170时,此时的E属于PM和PB之间,而此时的E也会对应2(或1)个隶属度。E隶属于PM(120)的百分比为(180 - 170) / (180 - 120) = 1 / 6 ,而同理隶属于PB(180)的百分比为(170 - 120) / (180 - 120) = 5 / 6 。意思就是120到180进行线性分割了,E离PM和PB哪个更近,则隶属于哪个就更大(当输出值E大于180(PB)时,则隶属度为1,隶属度值为PB,即E完全隶属于PB,同理当E小于 - 180 (NB)时也一样)。同理也可以对EC进行模糊化。
2.2 模糊推理
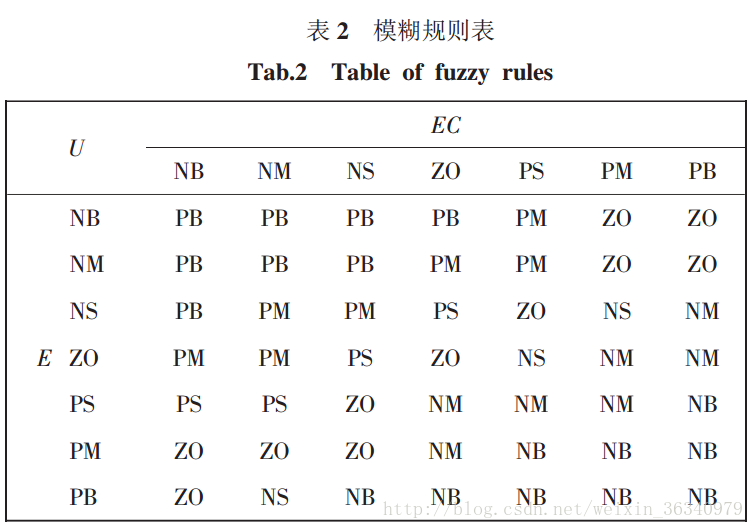
对于采集回来的E和EC,我们可以推出它们各所占的隶属度,此时我们可以根据模糊规则表去找出输出值所对应的隶属度。
我们假设为E的两个隶属度值为PM、PB,E属于PM的隶属度为a(a < 1),则属于PB的隶属度为(1 - a)。再假设EC的两个隶属度值为NB、NM,EC属于NM的隶属度为b,则属于NB的隶属度为(1 - b)。而在假设中,E属于PM的隶属度为a,EC属于NB的隶属度为( 1 - b ),则输出值属于ZO的隶属度为a *( 1 - b )(看图)。
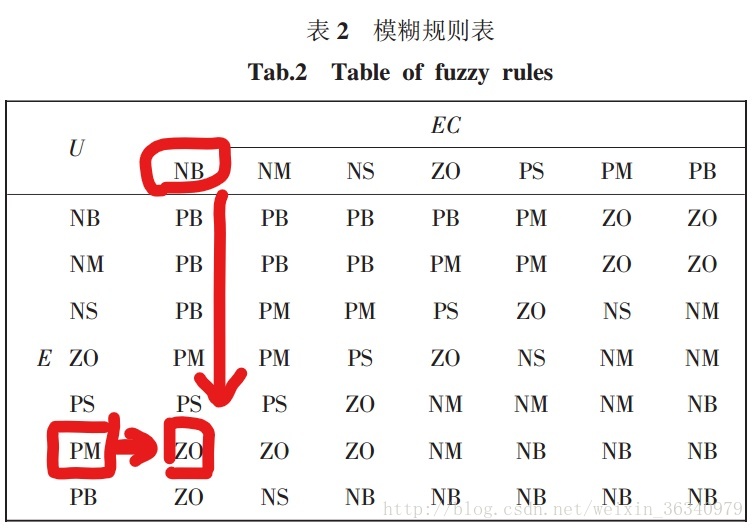
同理我们可以得出,当输出值属于ZO的另外两个隶属度为a * b, ( 1 - a ) * ( 1 - b) ,而输出值属于NS的隶属度为( 1 - a ) * 1 - b。
在这里我们先证明一个条件,将这四个隶属度加起来,刚好等于1。这是因为
(a + (1 - a)) * (b + (1 - b)) = a * b + ( 1 - a ) * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) (下图)
即一个十字相乘的概念。这个等式说明输出值的隶属度之和等于1(第三步求解的时候需要用到隶属度之和)。

因此,我们知道了输出值为ZO的隶属度和为 a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ,输出值为NS的隶属度为 ( 1 - a ) * b 。
2.3 清晰化
对于输出值,我们同样采用给予隶属度的办法。例如,我们把输出值假设为[1000,1400](即舵机的摆角值范围)的区间同样划分为八个部分,即7个隶属值NB,NM,NS,ZO,PS,PM,PB。根据上一步所得出的结论,我们就可以用隶属度乘以相应的隶属值算出输出值的解,即 (a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS。到此为止,整个模糊过程就结束了。
3 模糊PID
我们已经知道了整个模糊的过程,但上述的过程还不够完美。因为我们的输出值只有一个输出,并没有实现PID。因此我们可以先对E和EC进行模糊化,然后分别对kp和ki和kd(PID的三个参数)进行求解,再套入公式。
一般的我们也可以只用kp,kd,不用ki。而模糊规则表一般的论文已经基本给出。因此带入算法之后我们的难度也只是在于调节kp,kd,和适当调节规则表。当然调节的难度会大于普通的PID,因为还要定kp,kd的输出范围,调得不好可能效果并没有普通的PID好。
4. 部分解释
4.1对于部分论文所说的重心法解模糊,其实就是上述方法。公式如下。
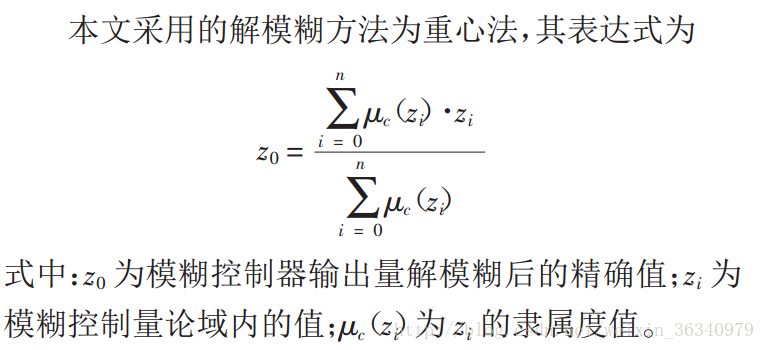
式中μ(Zi) * Zi相当于文章上面的(a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS,即隶属度乘以隶属度值之和,而μ(Zi)之和就是输出值的隶属度之和,我们已经证明它是等于1的
PS:模糊控制表在相关书籍中都有,都是前辈的经验,一般的无需修改即可,不过如果自己要配自己的数据也可以自己配,逻辑关系理清楚就可以了,反正我自己理来理去还是挺锻炼对pid三个变量的理解的,当然不止pid,模糊控制也可以单独使用,很灵活的,重点就是各个参数范围确定,这是影响模糊控制最重要的因素。
2.转自 https://blog.csdn.net/akunainiannian/article/details/41130347
matlab版本:matlab2010b
第一步:利用matlab模糊控制工具箱设计模糊控制器。
1、在matlab命令窗口中输入 fuzzy ,产生如下窗口。

2、确定模糊控制器结构,即根据具体的系统确定输入、输出量。
这里我们可以选取标准的二维控制结构,即输入为误差e和误差变化ec,输出为控制量u。输入变量的添加通过 Edit -> Add Variable -> Input 实现。

3、语言值及隶属函数的确定。
首先我们要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZE,PS,PM,PB},并设置输入输出变量的论域,例如我们设置误差E、误差变化EC的论域为[-6 6],控制量U的论域为[-10 10];然后为模糊语言变量选取相应的隶属度函数。通过 Edit -> Membership Functions 打开隶属度函数编辑器,然后分别对输入输出变量定义论域范围,添加隶属函数,以E为例,设置论域范围为[-6 6],添加隶属函数的个数为7。(注:隶属度函数编辑器初始时已为每个变量定义了3个隶属函数,再通过 Edit -> Add MFs 添加隶属函数时,个数选择4即可)

4、模糊控制规则的制定。
对于我们这个二维控制结构以及相应的输入模糊集,我们可以制定49条模糊控制规则。

5、解模糊。
模糊控制器的输出量是一个模糊集合,通过解模糊化方法判决出一个确切的精确量,解模糊化方法很多,我们这里选取重心法。

6、保存建立的模糊控制器。
File -> Export -> To File,文件名为 fuzzy_control。
第二步:建立Simulink模型。
1、在matlab命令窗口中输入simulink,产生如下窗口。

2、新建模糊控制器模型,样式如下。

3、在matlab命令窗口下输入 fuzzy = readfis('fuzzy_control') ,将之前建立的模糊控制器加载到工作空间,并将Fuzzy Logic Contrtoller的参数设置为fuzzy。

4、保存该模型,命名为 fuzzy_model
第三步:系统测试界面的设置。
1、通过 Tools -> System Test -> Launch System Test 进入系统测试界面。

2、添加测试模型。
鼠标选中Main Test ,菜单栏 Insert -> Test Element -> Simulink ,选择第二步中建立的模型 fuzzy_model 。

3、变量定义。
在Test Vectors 项里定义两个测试向量,变量名分别为 input1、input2,input1 = [-6:1:6], input2 = [-6:1:6];在Test Variables 里定义测试变量,变量名为output。

4、变量映射。
把测试向量input1、input2分别映射到模糊控制器的输入口 in1、in2,做为输入测试信号。把测试变量 output 映射到模糊控制器输出口out1。设置后的界面如下:
输入测试向量到模糊模型输入口映射:

模糊控制器输出保存映射:

5、测试数据保存。
在测试界面点Save Results项,设置如下:
6、运行测试,注意在Main Test(169 Iterations)(169次迭代,运算代价),等待测试结束。

第四步:模糊控制查询表的生成
1、系统测试结果保存在 stresults.ResultsDataSet.output 中,为169*1 cell的单元数组。(注:单元cell为 [n*1 double] 结构,表示系统被测试了n次)。
2、在matlab命令窗口下输入 test_data = stresults.ResultsDataSet.output ,将测试结果另存在变量 test_data 中。
3、测试结果格式转换。
由于所建的二维查询表为13行13列,所需的数据应该为13*13 double数组,但因为test_data为 169*1 cell 的单元数组,无法直接作为表格数据输入,因此需先进行格式转换。
在matlab命令窗口下输入 table_data = Cell2Array( test_data , 1 , 13 , 13 ) ,调用Cell2Array函数,取每个单元数组中的第一行元素,即第一次测试数据,返回结果保存在 table_data 中。
源码如下:
4、新建二维查询表模型,样式如下:

5、点开二维查询表进行如下设置:

6、点 Edit 按钮,即可查看所生成的表格。

PS:以上两篇就是我基本完成的教程了,matlab因为自己不怎么熟,所以折腾了挺久的,基本就是从matlab什么都不懂到可以完成这个仿真,然后我也把新手可能出现的一些问题讲讲吧。
看了第一篇之后到matlab模糊控制器的设置保存应该问题不大,之后就是建立仿真模型,因为从来没用过所以一窍不通,我的版本是2016b,界面也和上面的有些不同,可是吃了点苦头,所以以下就是给新手看看的,不要笑我教的简单哈
首先,simulink界面不同,我的是新版的
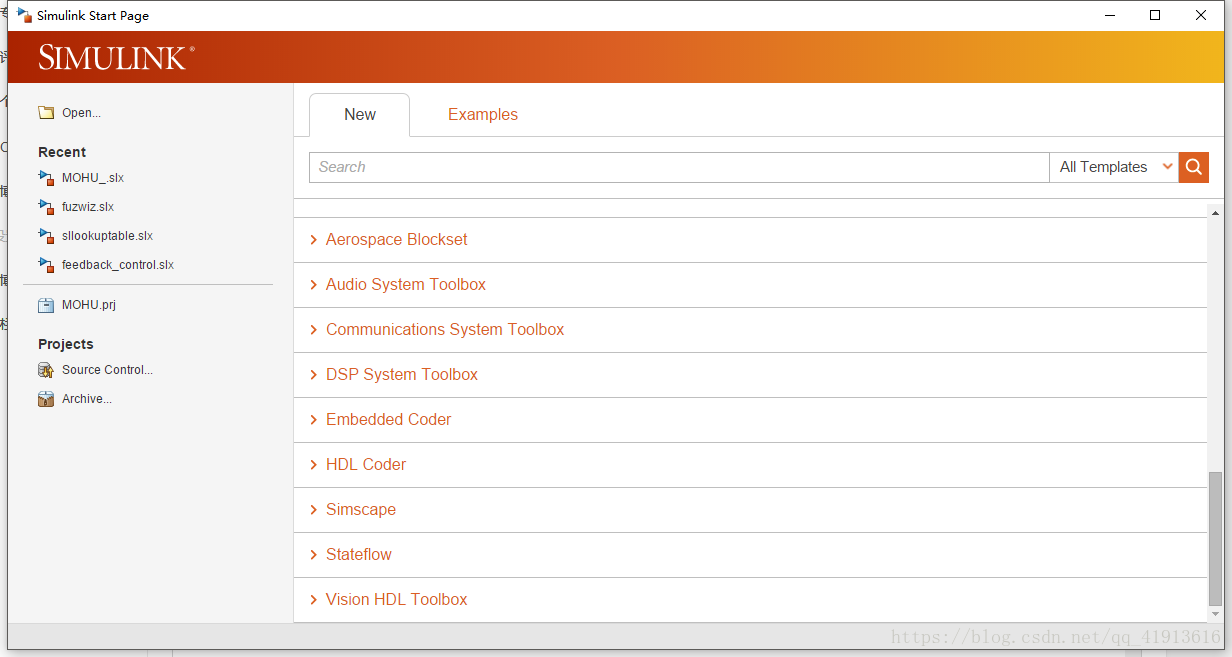
是这样的界面,刚开始一脸懵逼不知道怎么建立仿真模型
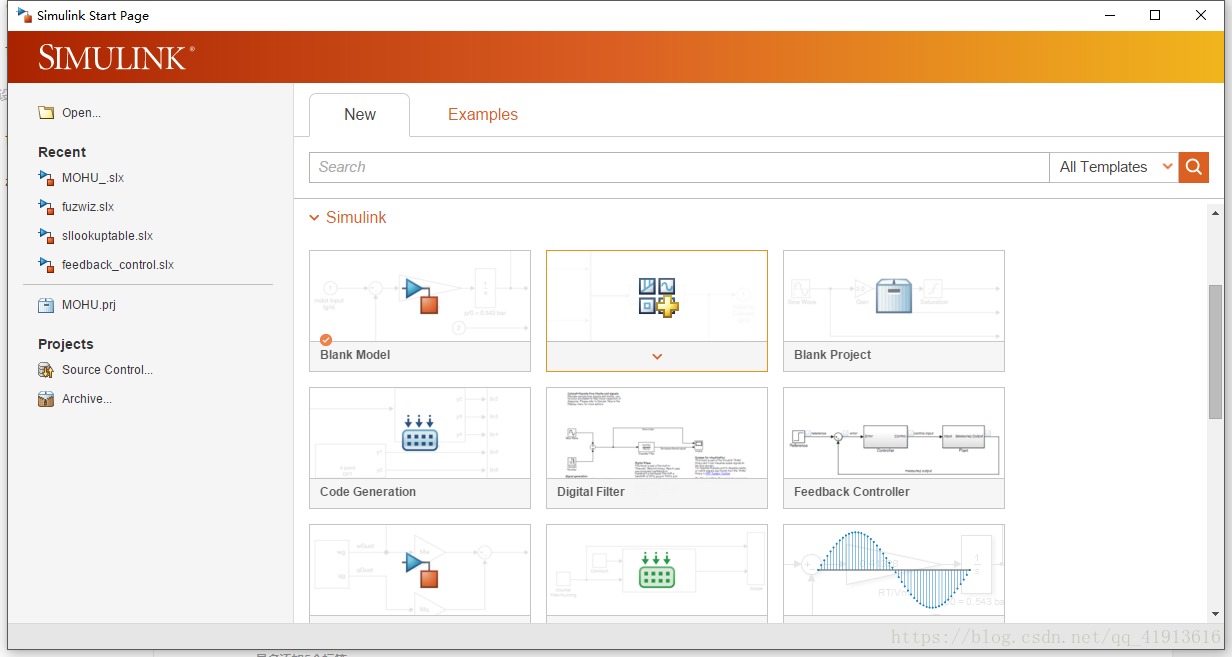
之后随便点一个建立一个新的就好
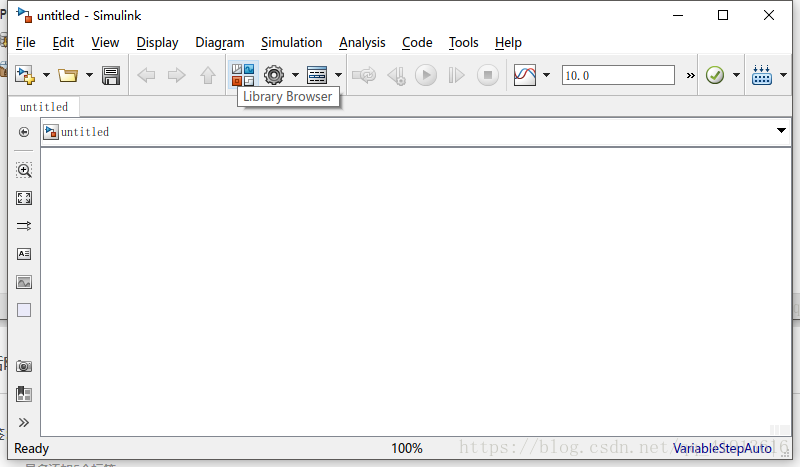
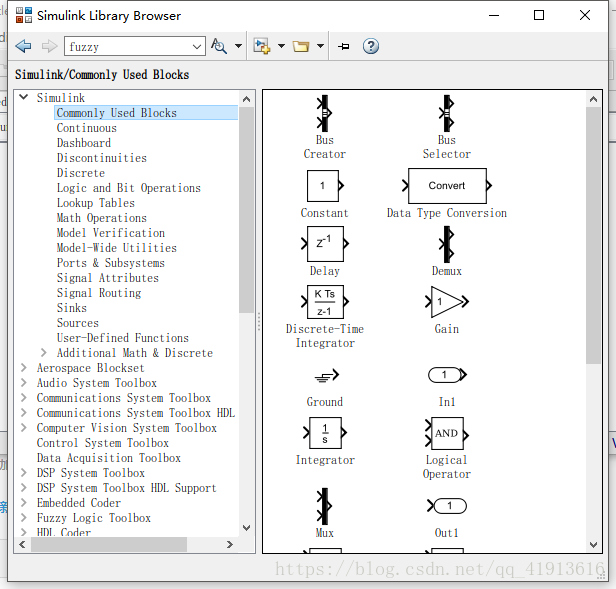
这个界面之后点那个Library Browser,里面有需要的元素,你就按上面那个图把元素都复制过来就好
注意那个fuzzy的图标,改变输出的个数是双击它有选项,我当初找了半天硬是找不到,,
把该加的东西都放进去,连接好
然后在matlab命令行里把之前保存的模型读取出来
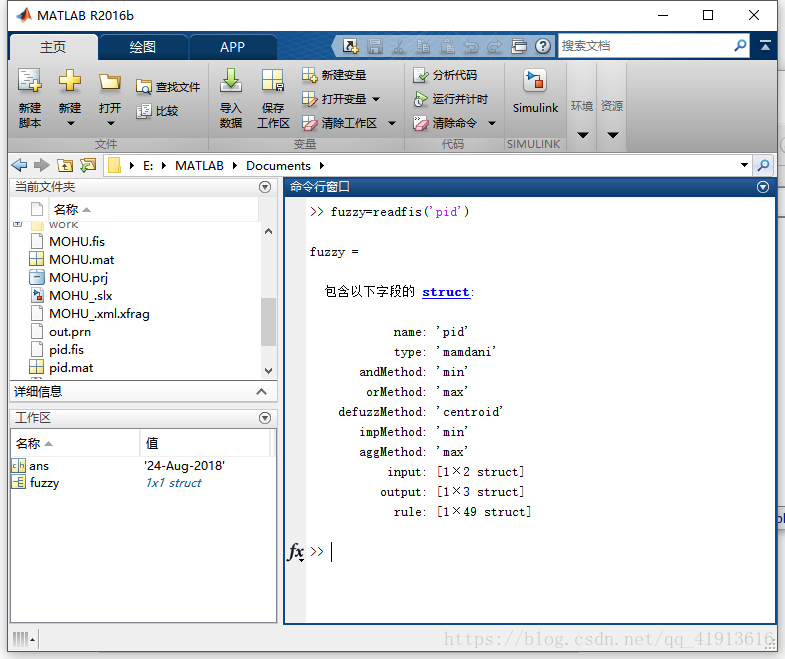
用readfis命令把之前保存的数据赋给变量fuzzy,模型名字你们取得是什么就写什么
之后在仿真fuzzy图形上双击,把参数设成fuzzy,就是上面的步骤
最后就是test了,很坑啊,matlab2016a之后的版本就没有那个功能了,所以得用下别人的软件来做最后的测试,之后就看着慢慢设置就好,我只做到了测试运行那一步,因为参数还要调整所以就没到之后导表
大概就这么多了,其实都是给新手讲的,也想给自己留着复习复习,还有感谢各位在csdn里留下的各种学习资料,谢谢