机器视觉-结构光测量之三角测量原理
结构光测量中为了获取物体的三维信息,一般都会使用三角册来那个的原理;其基本思想是利用结构光照明中的几何信息帮助提供景物中的几何信息,根据相机,结构光,物体之间的几何关系,来确定物体的三维信息,下图给出了一个三角测量的原理图。
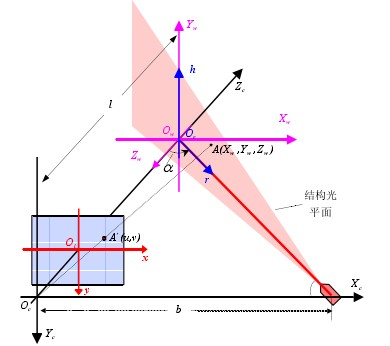
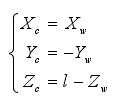
结构光平面与相机光轴夹角为角,取世界坐标系Ow-XwYwZw的原点Ow位于相机光轴与结构光平面的交点,Xw轴和Yw轴分别与相机坐标系Xc轴和Yc轴平行,Zw与Zc重合但方向相反。Ow与Oc的距离为l。则世界坐标系与相机坐标系有如下关系:
A的像为A′,在世界坐标系中,视线OA′的方程为:

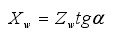
在世界坐标系中,结构光平面的方程为:
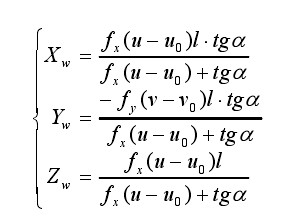
解得:
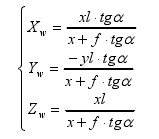
又由于数字图像上定义直角坐标系Op-uv,每一像素的坐标(u,v)分别是该像素在图像数组中的列数与行数,(u,v)是像点在数字图像坐标系中以像素为单位的坐标。像点在像平面上的物理位置,建立以物理单位表示的像平面二维坐标系Oi-xy,该坐标系x轴和y轴分别与u轴和v轴平行,原点为相机光轴与像平面的交点,一般位于图像中心,但在实际情况下会有小的偏移,在Op-uv中的坐标记为(u0,v0)。每一像素在x轴和y轴方向上的物理尺寸为Sx和Sy,则图像中任意一个像素在两个坐标系下的坐标采用齐次坐标和矩阵形式表示,有如下关系: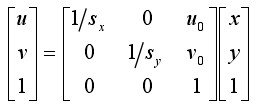
逆关系为:
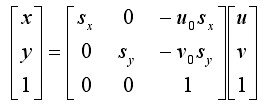
可以得到像素点一世界坐标点之间的对应关系为: