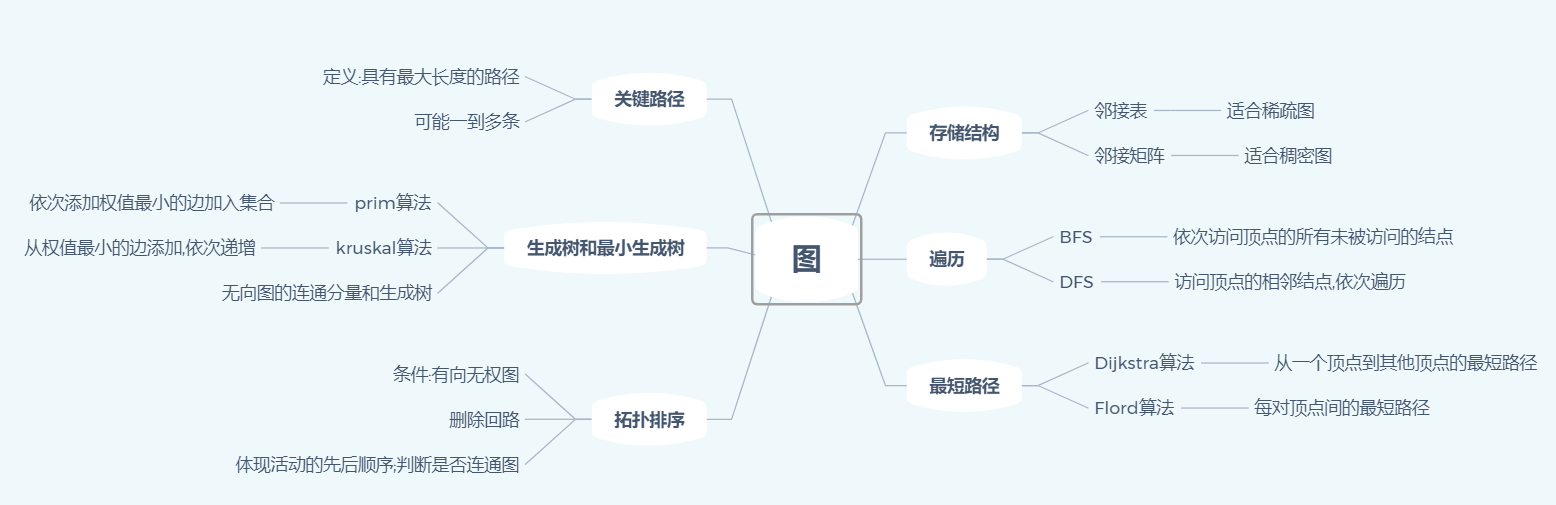
1.思维导图
2.重要概念的笔记(不求多但求精)
有向图中,顶点的度=入度与出度的和
无向图中,顶点的度 =入度 = 出度
邻接表:想法:每个顶点都建立一个单链表存储,用来记录从该点出发的所有边的信息,第i个链表的第j个值即顶点i到j的权值
邻接表不唯一(边的输入次序和边结点的链接次序 不同);
邻接表适用于稀疏图
优点:查找任意一个顶点关联的所有边很快速
缺点:每次都要遍历各顶点的边表,耗时
邻接矩阵适用于稠密图
优点:时间复杂度比邻接表小
缺点:存储不是邻接的边也占空间,浪费
1.初始时,只有源点,即S = {V}。U包含除V以外的其他顶点,即U ={其余顶点},若V与U中顶点u有边,则(U,V)值=对应边的权值,否则权值 ∞;
2.从U中选取一个离V最小的顶点k,把k加入S中;
3.若从源点V到顶点U的距离(经过顶点k)比原距离短,则更新顶点U的距离
算法缺点:不能求出两点的最短路径(Floyd算法可以)
void Dijk(int v)//v是源点
{
bool S[MAX];
int n=MAX;
for(int i=1; i<=n; ++i)
{
dis[i] = A[v][i];
S[i] = false;
path[i] = v;
}
dis[v] = 0; S[v] = true;
for(int i=2; i<=n; i++)
{
int mindist = INT;
int u = v; //找出当前未使用的点j的dist[j]最小值
for(int j=1; j<=n; ++j)
if((!S[j]) && dis[j]<mindist)
{
u = j; //u保存当前邻接点中距离最小的点的号码
mindist = dis[j];
}
S[u] = true;
for(int j=1; j<=n; j++)
if((!S[j]) && A[u][j]<INT)
{
if(dis[u] + A[u][j] < dis[j]) //在通过新加入的u点路径找到离v点更短的路径
{
dis[j] = dis[u] + A[u][j]; //更新dist值
path[j] = u; //记录前驱顶点
}
}
}
}
void Floyd(MatGraph g)
{
int A[MAXVEX][MAXVEX];
int path[MAXVEX][MAXVEX];
int i,j,k;
for(i=0;i<g.n;i++)
{
for(j=0;j<g.n;j++)
{
A[i][j]=g.edges[i][j];
if(i!=j&&g.edges[i][j]<INF)
{
path[i][j]=i; //i和j之间有1条边
}
else
path[i][j]=-1; //i和j之间没有边
}
}
for(k=0;k<g.n;k++)
{
for(i=0;i<g.n;i++)
{
for(j=0;j<g.n;j++)
{
if(A[i][j]>A[i][k]+A[k][j]) //找到更短路径
{
A[i][j]=A[i][k]+A[k][j]; //修改最短路径长度
path[i][j]=k; //修改经过顶点k
}
}
}
}
}
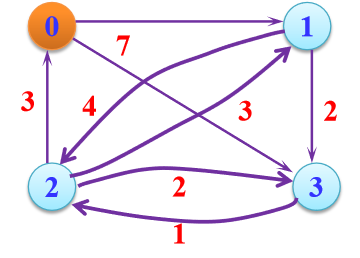
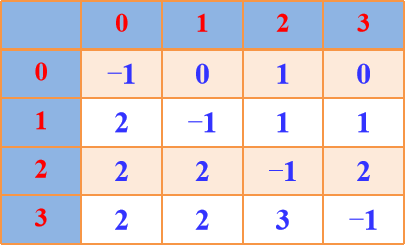
Floyd算法图示:
A[i][j]表示当前顶点i到顶点j的最短路径长度,path[]表示最短路径
A0 path0

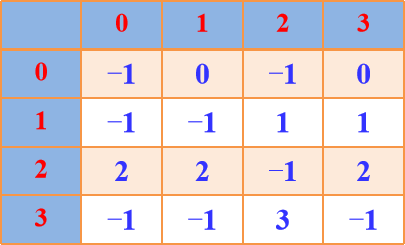
A1 path1
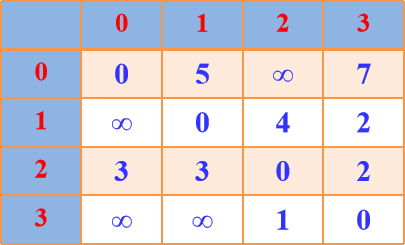
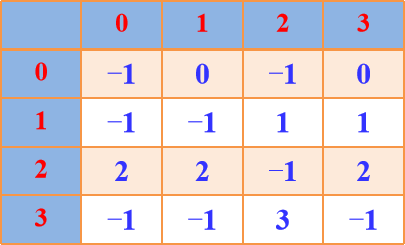
A2 path2
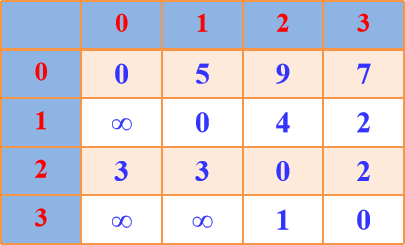
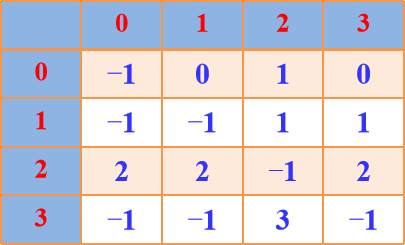
A3 path3

而Prim算法需要每次都对边找出权最小排序才能
Prim算法:时间复杂度O(n^2)与边数e无关、适用于稠密图和邻接矩阵存储(边的权值)
Kruskal算法:时间复杂度O(elog2e)、只与边数有关,适用于稀疏图和邻接表存储
void Prim(MGragh G) { int min,i,j,k;//min;权值最小值 int adjvex[MAXVEX]; //保存相关顶点下标 int lowcost[MAXVEX];//保存相关顶点间边的权值 lowcost[0] = 0;// 表示i那个下标的顶点加入生成树 adjvex[0] = 0; //初始化 for(i = 0; i < G.numVertexes; i++)//lowcost,adjevx赋初值 { lowcost[i] = G.arc[v][i]; adjvex[i] = v; } for(i = 1; i < G.numVertexes; i++) //最小生成树 { min = INFITINY; //先把min置为无限大 j = 1; k = 0; while(j < G.numVertexes) { if(lowcost[j] != 0 && lowcost[j] < min)//判断并向lowcost中添加权值 { min = lowcost[j]; k = j;//记录最近顶点的编号 } j++; } printf("(%d %d)",lowcost[k],k); lowcost[k] = 0;//置0表示这个定点已经完成任务,找到最小权值分支 for(j = 1; j < G.numVertexes; j++) { if(lowcost[j] != 0 && G.arc[k][j] < lowcost[j]) { lowcost[j] = G.arc[k][j]; adjvex[j] = k;//修改数组lowcost,adjvex } } } }
前提:有向无环图;目的:表示活动的优先/先后关系
算法思想:1.找到有向无环图中没有前驱的顶点,输出;2.从图中删除此节点且删除该节点发出的所有边或弧
关键路径:从有向图的源点到汇点的最长路径
关键路径的长度:完成这项活动的最短时间
事件的最早开始时间:事件v的最早开始事件,一定是所有前驱事件x,y,z完成,才轮到事件v
ve(v)=max{ve(x)+a,ve(y)+b,ve(z)+c}
事件的最迟开始时间:保证后继所有事件能按时完成的最小值
vl(v)=min{vl(x)-a,vl(y)-b,vl(z)-c}
3.疑难问题及解决方案(如果有的话,不求多但求精。可包含编程题,可只包含无解决方案的疑难问题)
1.输出无向图中从顶点u→v的所有简单路径(深度优先遍历),用队列法
2.图着色问题(伪代码)
CreateMGraph建邻接矩阵
初始化图 输入n; for(i=0to n) { flag,num为0; color数组为0; for(j=0 to n){ 输入color[j]; if(该颜色没出现过){ 该颜色置为1; num++; } if(flag为0同时颜色数量没有超出限制){ for(遍历标号比他小的所有连通的点)
if(相邻顶点颜色重合)
flag=1; } if(出现相同颜色或者颜色过多)输出No; 否则输出Yes; }