标题·:KnowRob 2.0 — A 2nd Generation Knowledge Processing Framework for Cognition-enabled Robotic Agents
作者:Michael Beetz1, Daniel Beßler1†, Andrei Haidu1,Mihai Pomarlan1, Asil Kaan Bozcuo˘glu1 and Georg Bartels1
0. 摘要
在本文中,我们介绍了KNOWROB2,这是第二代机器人代理的知识表示和推理框架。 KNOWROB2是KNOWROB的扩展和部分重新设计,KNOWROB是当前最先进的机器人知识处理系统之一,使它们能够成功执行复杂的操作任务,例如做比萨,进行化学实验和布置桌子。该知识库看似是常规的一阶时间间隔逻辑知识库,但实际上仅存在很大一部分:许多逻辑表达式是根据需要从控制程序的数据结构中构建的,这些数据表达式是通过机器人算法(包括运动算法)计算得出的规划和解决逆运动学问题,并记录存储在noSQL数据库中的数据。 KNOWROB2的新功能和扩展功能极大地提高了机器人代理获得开放式操作技能和能力,推理如何更现实地执行操作动作以及获得常识的能力。
1. 介绍
要完成目标导向的对象操纵任务的机器人代理,需要大量常识和直观的物理知识。 需要这些知识来弥合诸如“拿起杯子”之类的不确定指令与完成动作所需的详细运动规范之间的差距。 必须根据其形状,重量,特性(易碎,热,柔软或潮湿),要执行的任务以及将其从中取出的位置来不同地抓握许多物体。 为避免不必要的副作用,机器人可能需要精确握住手柄并保持杯子直立。 适当的掌握和运动参数设置取决于背景知识。 即,手柄是用于保持杯子的对象部分,并且应该将其竖直保持以避免溢出。
KNOWROB2是KNOWROB [1]的扩展和部分重新设计,它提供了知识表示和推理机制,可以就如何参数化运动以做出明智的决定来完成操纵任务。扩展和新功能包括环境和机器人体验,视觉推理以及基于仿真的推理的高度详细的符号/亚符号模型。重新设计的方面包括提供接口层,该接口层通过统一的,以实体为中心的,基于逻辑的知识查询和检索语言来统一非常不同的表示形式。此外,KNOWROB2旨在利用运动认知和机器人控制的概念和结果将AI推理扩展到运动水平,并使机器人的推理机制更强大。通过采用现代信息处理技术(例如游戏引擎的物理模拟和渲染机制,大数据记录,存储和检索技术以及机器学习),可以促进这些新功能。通过使用上述领先的信息技术,机器人代理可以从经验和观察中获得掌握人类规模操作任务所需的一般性和直观的物理知识,并使AI推理可在感知-行为循环中发挥作用机器人。
本文的目的是概述(•)知识处理框架应提供哪些其他认知功能,以掌握人类规模的操作任务;(•)KNOWROB2如何集成这些功能以提供快速的, 健壮且统一的机器人控制系统查询应答功能,可返回可以由机器人执行系统执行的结果,以及(•)如何通过用于基于照片的真实渲染和基于模拟的推理的领先技术来实现这些认知功能 。
除其他功能外,KNOWROB2提供了以下认知功能,这些功能超出了其他机器人知识处理系统所提供的功能。 KNOWROB2能够
- “眼睛和手的原因”。 它能够以几乎逼真的细节来想象环境的状态。 它还能够想象操纵动作在对象的运动和力-动力相互作用级别上的执行,并将观察到的状态演化转换为可用于语义信息检索和推理的一阶时间逻辑表示。 类似的功能可用于从精神上观察想象的场景。 当前,此功能是通过附加的初步知识系统实现的,该系统在基于照片现实和基于物理模拟的游戏引擎的基础上作为附加知识系统而实现。
- 关于运动参数的推理,从而实现或避免了某些物理效果。 目的是通过所需的物理效果来指定动作,然后运动控制系统会自动推断出适当的运动参数和适应性。 这是通过学习有关动作的物理效果如何根据运动参数设置变化的通用模型来完成的。
- 从适用于新颖情况和任务的经验中学习广义常识和直观的物理知识。 实现这种功能的信息处理机制是受到人类记忆系统以及情节性记忆在获取通用知识中的作用的启发[2]。 KNOWROB2采用有效记录,存储,维护和语义索引巨大的传感器和运动数据流以及数据密集型机器学习和数据分析方法的技术来完成此任务。
KNOWROB2可通过知识服务OPENEASE [3]部分获得,OPENEASE是一个平台,机器人和研究人员可通过该平台上载,访问和分析执行操作任务的机器人的情景记忆。 该服务可从www.openease.org公开访问。
我们通过展示KNOWROB2在查询应答中的综合功能来评估它。 我们将给出一些查询示例,这些查询对于机器人操纵中的决策和运动参数化必不可少,这些查询超出了基于机器人动作状态转换模型的表示形式所能回答的范围。 其他查询可通过OPENEASE1获得。
本文的其余部分安排如下。 下一部分将概述KNOWROB2框架并描述其体系结构。 随后的各节将详细说明框架的各个推理组件。 最后,我们描述了基于逻辑的界面语言,以及机器人如何从情景记忆中学习。
2. 总览
像今天的信息代理人(例如iPhone的Siri)一样,机器人会将KNOWROB2用作查询应答系统。 主要区别在于KNOWROB2在机器人代理程序的感知动作循环内运行:许多查询与代理程序正在执行的任务相关,并引用其捕获的图像,其执行的动作等。这些查询主要是由查询决定的 有关如何操作对象或参数化运动的信息。 例如,对于清理桌子的任务,典型的查询是:杯子和盘子在哪里,在哪里站起来拿起一个物体,如何到达该物体,如何放置夹持器,施加多少力,如何移动 用来捡起它的手臂,如何握住它等等。 为了回答此类详细查询,KNOWROB2与控制程序紧密连接,重用了其某些算法,并与它共享数据结构。
图2中描绘了一个典型的推论。该示例摘自一个情节,在此情节中,机器人特工抓住杯子将倒出的物品倒出。 机器人询问查询如何拿起杯子倒出其残留物。 在Prolog中陈述的查询的工作方式如下:它检索一个倾倒动作Tsk,该动作具有一个子动作来掌握源容器,称为Spt-Tsk。 然后,它查询预抓握PG和抓握姿势G以及相应到达运动的抓握力,并显示这些运动参数。
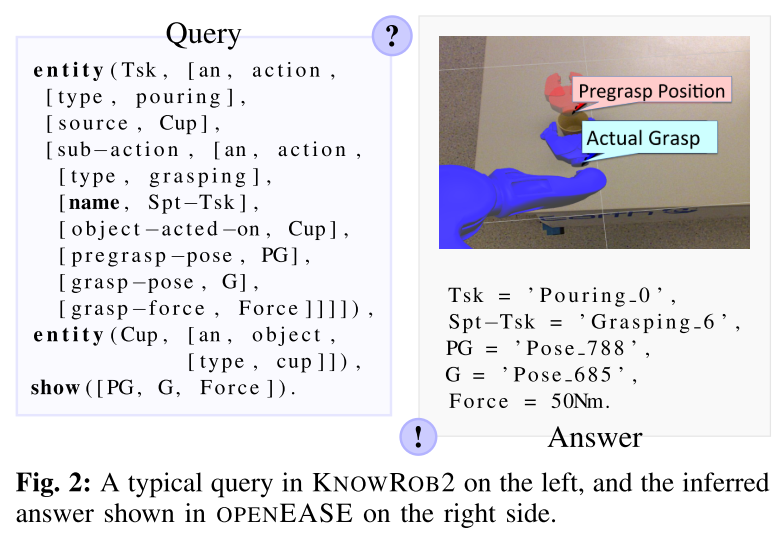
关于查询,应该讨论几个方面。 首先,查询需要访问数据,并在控制系统的感知动作循环中对数据结构和函数调用进行参数化; 因此,它在机器人系统的实施例中起作用。 其次,知识处理系统的详细程度远高于人工智能中通常使用的那种程度,后者将动作视为黑匣子,因此无法推理运动参数以及运动参数与动作效果之间的关系。 降低代表知识的抽象水平的结果是使符号表达更容易扎根。 可以很容易地看到,所查询的信息(即预抓握和抓握姿势)相对于所感知的场景是适当的基础。
KNOWROB2本身的体系结构如图1所示。它的一个独特功能是本体符号表示的中心位置,甚至位于控制系统的数据结构下方。 这使程序员能够进行语义注释,并使控制系统自动计算数据结构的语义。 第三部分提供了有关KNOWROB2使用的表示的更多详细信息。
围绕本体的是混合推理壳。 计算过程的许多数据结构,表示形式和参数都具有相关的公理化,这些公理化描述了它们相对于本体的含义,从而使机器人控制系统可以将此数据当作符号知识库来使用。 混合推理外壳使用多种方法来实现知识。 关键组件是控制系统的数据结构和诸如逆运动学和运动计划之类的机器人算法,例如,如果运动计划者可以找到到对象位置的无碰撞路径,则允许程序员指定机器人应该相信该对象是可到达的。 第四部分将详细讨论混合推理内核。
混合推理外壳的另一个关键和新颖的组成部分是内部世界知识库[4]。 它是具有物理模拟和视觉功能的游戏引擎中机器人环境的详细,逼真的重建,并为KNOWROB2知识处理框架添加了强大的推理方法。 首先,机器人可以使用游戏引擎提供的视觉功能通过虚拟观察场景来对场景进行几何推理,并通过在其物理模拟中监控的力动态事件的语义注释来预测动作的效果。 正如Winston [5]所制定的那样,它允许机器人用眼睛和手进行推理。
后续接口层通过基于逻辑的语言公开集成在其下方的控制机制的推理能力。 该语言利用控制级数据结构进行即席符号接地,并利用本体来统一这些异构表示。 为了在接口层之上应用,混合推理外壳似乎是一阶逻辑知识库,但是它很大程度上是根据控制程序数据结构的需求构建的,并通过机器人算法进行计算。 第五节对此进行了讨论。
最后,界面外壳提供了KNOWROB2的问题回答,感知界面,经验获取和知识学习界面,可以利用集成在界面层下的丰富的混合推理机制集。
综上所述,KNOWROB2提供的混合推理外壳将机器人控制推理机制与内部世界的知识库,经验获取以及其他感知和学习机制统一起来,使KNOWROB2成为个人机器人的有力知识服务,并且与出于相同目的(例如[1],[6]和[7])可用的知识表示框架相比,它具有独特性。
3. 本体和公理化
AI和自治代理研究中使用的动作表示形式通常以较粗糙的细节表示代理控制系统,在该动作下,动作由黑匣子模型描述。 取而代之的是,KNOWROB2将本体放在控制系统的核心,这样,即使是在较低级别使用的数据结构,也可以根据核心本体在语义上进行语义注释。
4. 混合推理内核
KNOWROB2的混合推理内核包含一组知识库,其中包括
- 内部世界知识库:由CAD和以精确的6D姿势定位的对象的网格模型组成的世界模型,并配备了物理模拟,
- 虚拟知识库:根据控制系统数据结构的需求进行计算,
- 逻辑知识库:具有逻辑公理和推理机制的抽象符号传感器和动作数据,以及
- 情景记忆知识库:机器人代理的经验。
通常,这些知识库的知识内容可能是多余的或不一致的。 KNOWROB2不会计算出正确的答案,而是会计算多个假设,然后检查这些假设的合理性和一致性,就像Watson系统的运行方式一样。
为此,KNOWROB2采用了混合推理方法。 我们将概述那些对于机器人操纵任务的推理特别有力的方法:基于内部世界模型的推理(例如基于仿真的推理)和运动控制推理。
A. 叙事性情景记忆
当有人谈论上一届足球世锦赛的决定性目标时,我们中的许多人都可以在“头脑中”“重播”这一集。 使我们能够从抽象描述中调用这些非常详细的信息的记忆机制是我们的情节记忆。 情景记忆之所以强大,是因为它使我们能够记住自己的特殊经历。 它也可以用作我们从中学习常识的“存储库”。
KNOWROB2将情节记忆深深地集成到知识获取,表示和处理系统中。 每当机器人特工执行,观察,预期和读取某项活动时,它都会产生情节性记忆。 情景记忆最好理解为视频,该视频由代理人对正在进行的活动进行制作,并结合有关动作,动作,其目的,效果,它们产生的行为,所捕获的图像等的非常详细的故事。
我们称其为由系统叙述启用的情节记忆(NEEM)创建的情节记忆。 NEEM由NEEM经验和NEEM叙述组成。 NEEM经验是对特定情节的详细,低级,按时间索引的记录。 体验包含姿势,感知,控制信号等的记录。这些可用于详细重播剧集。 NEEM体验与NEEM叙述相关联,NEEM叙述是为故事中发生的事情提供了更抽象的符号描述的故事。 这些叙述包含有关任务,上下文,预期目标,观察到的效果等的信息。
NEEM中包含的信息示例如图3所示。在此情节中,机器人清理了餐桌上有一个碗和一个勺子的餐桌。 所描绘的时间线在机器人开始执行动作的某些时刻具有标记。 在这些时刻由机器人捕获的图像显示在该图的第一行。时间轴下方显示了机器人的姿势。 机器人在t1处导航到桌子,以在t2处感知在桌子上方的物体,在t3处建立预握姿势,并在t4处抓住勺子。 图的底部显示了知识库中的一些相应断言。 这些断言表示,例如,在t2发生了事件ev123,该事件是具有相应感知任务obj246的检测事件,该感知对象由ob j345描述,并且该对象对应于捕获图像img456的图像区域reg567。 这些符号断言链接到控制程序的数据结构,以用诸如具体动作之类的低级信息丰富高级活动描述。
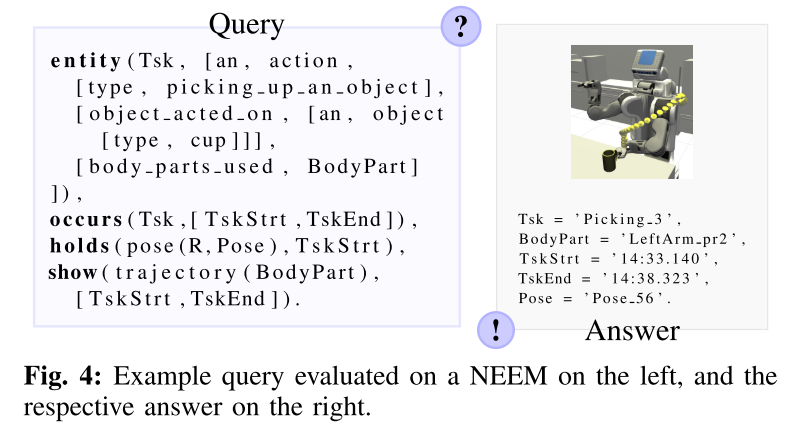
NEEM允许询问有关机器人执行了哪些动作,何时,如何执行以及为什么执行它们,是否成功,机器人看到了什么以及执行该动作时机器人的看法的查询。机器人可能会问一些问题,例如:我如何拿起杯子,我使用了哪个身体部位以及如何拿起我的姿势。 这些问题映射到一个查询,如图4所示。KNOWROB2根据查询中自由变量的符号绑定为查询提供了答案,并根据机器人的信念通过视觉呈现场景。
B. 内部世界知识库
KNOWROB2使用的知识库之一是基于所谓的内部世界模型的。 基本思想是创建机器人代理所处环境的真实感副本,该副本由带有物理引擎的符号注释3D网格模型组成。 尽管此知识库提供了符号知识库的所有功能,但它还允许机器人代理以其“头脑”看待环境,并在心理上执行操纵操作,以预测其参数化的效果。
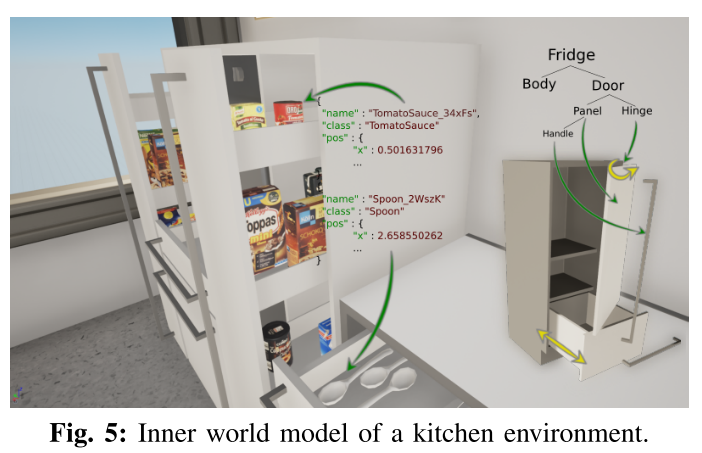
图5显示了机器人在其中运行的厨房环境的内部世界知识库。我们可以看到内部世界知识库非常详细和现实。环境中的对象由具有精确CAD模型的对象部分组成。 因此,橱柜由带有把手的门和架子组成。 橱柜还配备有铰接模型,该模型允许机器人代理模拟打开橱柜。 诸如谷物盒的对象是逼真的建模对象,并站立在架子上。 当推入时,盒子会翻倒,并取决于施加的力落到地板上。
内部世界知识库中的实体具有符号名称,并带有表示其属性的断言。 通过断言内部世界知识库中的实体是KNOWROB2本体中定义的类别橱柜的实体,机器人代理可以推断有关该实体的背景知识。 例如,它可以推断出脏碗碟属于洗碗机,易腐烂物品属于冰箱,等等。
KNOWROB2使用内部世界知识库进行基于仿真的推理,以进行纯粹的符号知识库难以实现的推理(请参阅IV-C节)。 例如,它可以形成对冰箱内部外观的期望,或者插入某个物品是否可能导致另一个物品倾斜。
内部世界的知识库有两种:第一,一种反映代理关于环境状态和正在进行的活动的当前信念状态;第二,是根据需要创建的活动,以探索在假设的情况和情节中活动将如何进行。信念状态使用KNOWROB2术语表示,因此可以轻松反映在内部世界知识库中。
C. 基于仿真的推理
熟练执行操纵动作的一个重要方面是预见其在内部世界中的后果,以防止不必要的副作用。 这通常需要在连续的高维空间中仔细调整运动参数,包括身体部位的姿势,速度和力。 我们看到的预测运动效果的唯一可能机制是物理模拟。
事实证明,人类无需高度精确和详细的模拟就可以模拟他们的行为及其结果[8]。 例如,当从容器中倒出一种物质时,人们常常不知道该物质的粘度,或者当切割时却不知道待切割材料的刚度。 尽管存在这些局限性,但是模拟还是有价值的信息源,因为模拟可以预测可能的结果,代理可以使用这些结果来监视执行情况并在执行时确定正确的模型[9]。
基于仿真的推理是KNOWROB2所采用的推理策略之一。 它使用低抽象级别的表示(姿势,感知,网格)来预测运动参数化和(高级)计划的结果。 这些预测可用于推理正确的行动方案。 基于仿真的推理的好处是避免了框架问题[10]并捕获了在类似于逻辑的推理系统中很难形式化的物理行为的细微差别。 而且,推理的基础知识(粒子,碰撞,重力等)比我们可能手动输入的规则或知识要通用得多,并且包含空白的可能性也较小。
感官数据,控制命令和更高级别的事件(例如,对象之间的接触,对象的状态变化,抓握事件等)在模拟过程中不断记录,并声明给KNOWROB2的情节性存储器知识库。 由于我们想从这些记录中提取有意义的信息,因此我们必须从网格和姿势中抽象出例如状态和对象。 换句话说,我们创建了通过过程附件链接到亚符号信息的符号实体。 在虚拟环境中,我们可以在整个模拟过程中访问地面真实数据。
例如,在清理桌子时,机器人可能必须先将杯子中的一些剩余液体倒入水槽中,然后再将其放入洗碗机中,并且要考虑倾斜角度和高度,高度不要使液体在水槽中溢出太多。 在纯逻辑形式主义中很难实现这些目标,但是可以在仿真中监视流体动力学,并通过从数据中获取的NEEM将其暴露给KNOWROB2基于逻辑的界面语言。 可以像实际执行中的NEEM一样查询NEEM:
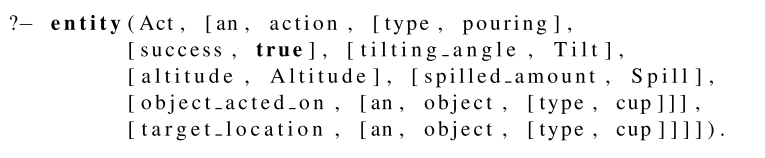
该查询用于检索成功的浇注过程,在此过程中,将一些液体从一个杯子倒入另一个杯子。 它还根据物理引擎的监视状态检索运动参数(即,倾斜角度和高度)以及溢出的液体量。 注意,我们将模拟用于学习和推理。 学习属于向NEEM学习(常识)知识(其中一些是在模拟中收集的),将在第六节中详细介绍。
对于基于仿真的推理,速度是一个挑战。 为了支持在线决策,这些过程必须在很短的时间内完成。 可以合理地预期,处理器/ GPU功率和物理引擎的快速发展将帮助我们显着改善这一方面。 此外,通过限制与现实世界的当前状态相比运行模拟的时间,例如,限制“向前看”的距离,我们可以限制基于模拟的推理所需的时间。 另一方面,速度对于从模拟情节中学习并不那么重要。 机器人可以在不活跃的情况下通宵进行“梦”,通过运行具有不同控制参数的活动模拟来实现。
D. 运动控制推理
KNOWROB2没有遵循经典的方法来推理动作。 也就是说,它没有抽象出如何执行动作的特殊性。 相反,它将动作表示与显式和模块化的动作描述结合在一起。 运动控制和动作表示以及推理的紧密结合在精神上类似于对组合任务和运动计划的研究[11]。 实际上,这种紧密的连接是胜任的机器人操纵能力的关键推动力。
为了对有效的机器人操纵行为问题有一个直观的认识,让我们回顾一下从杯子倒出的机器人的运行示例。 当机器人打算拿起装满牛奶的杯子时,必须将杯子直立以免洒落。 保持杯子直立是运动的约束,而杯子倾斜可能导致溢出的见解是因果关系的象征性结论。 同样,机器人可能想抓住杯子靠近重心的位置,以便在倒杯时更好地进行控制。 从这些示例中,应该从直觉上清楚地认识到,必须将运动控制和动作执行的推理紧密结合起来,以实现操纵能力。
通过不抽象动作的执行方式,KNOWROB2避免了确定适当的动作抽象级别的难题。 这确实是一个难题,因为适当的选择取决于手头的特定任务和机器人的物理能力。 在使用鸡蛋开裂问题的背景下,已经很好地研究了用抽象和离散表示来处理操纵动作时出现的问题。 结果表明,需要为简单的操纵问题陈述的断言和规则的数量激增,并且表示形式很复杂并且不是很直观。 通常是由于由不同的子问题将由操作动作引起的连续行为和事件以不同的方式离散化而引起的。
另一方面,用于机器人运动控制的现有技术方法仅产生执行操纵动作所需的复杂运动。 但是,这些方法缺乏代表性的手段和背景知识来确保胜任的动作执行。 通常,使用复杂的数学任务函数对运动进行建模[13]。 简而言之,对于机器人运动控制,操纵动作的执行是寻找连续运动轨迹,该运动轨迹在进一步的数学约束下优化任务功能。 这意味着控制系统不知道它正在执行倾倒动作,更糟糕的是,它不知道更改运动参数设置将如何改变动作的结果。
在本小节的其余部分中,让我们简要描述和引用KNOWROB2的两个最新扩展,它们提供了有关机器人运动控制推理的机制。
Tenorth等[14]提出了一些有关运动推理的机制。 以浇注液体的示例为例,知识库表示使用通用运动模板进行基于约束的运动描述的原因。 此外,内部知识库使用CAD模型推理来推断控制特征和框架在动作所涉及的对象上的正确放置。
Fang等人[15]学习了将倾倒任务的执行上下文与适当的基于约束的运动描述相关联的模型。 为此,作者将在基于交互式物理学的模拟中获得的人类浇灌示范编码为情节记忆,并应用随机森林回归提取对上下文敏感的参数化浇筑运动所需的广义知识。
5. 基于逻辑的语言
混合推理内核提供的表示和机制非常不同。 同样,完成更复杂的推理任务需要结合不同的推理机制。 此外,通过大量非结构化的关系或谓词集合表示知识的过程缺乏结构和模块性,这使知识工程变得困难。
为了方便使用异构表示和推理机制,KNOWROB2为混合推理内核提供了统一的逻辑接口。 这种界面语言向程序员提供了混合推理内核,就好像它是纯粹的符号知识库一样。
界面语言采用面向对象的观点,其中通过提供对它们的部分描述(即,实体谓词),将一切表示为好像是可检索的实体。 可以描述的实体包括对象,它们的零件和关节模型,由对象组成的环境,软件组件,动作和事件。
对于有效的机器人操纵而言,特别重要的是发生的事件以及在动作执行的某些阶段保持的状态属性(谓词发生并保持)。 世界的状态和机器人的内部状态不断变化,因此,附加到此信息的所有规则的结果。 机器人可能需要计划下一个动作,例如在清理桌子期间,并推断杯子中的残留物需要倒入水槽中,它必须将杯子搬到洗碗池中,并且必须倾斜杯子并等待几秒钟,直到将残留物倒入洗碗池中。 时间谓词使用事件逻辑表达有关事件发生的事实,并使用时间相关的关系表达世界状态的变化。 例如,某些物质在上午11点倒入的事实可以写为发生(倒0,11am),或者杯子随后倒空的事实可以写为:holds(空(cup0,true),上午11点)。
机器人代理程序的任务级别控制,感知和运动控制组件需要推理带有详细描述不同方面的部分描述的实体。 KNOWROB2实体描述语言促进了这一点,该语言允许根据其符号或子符号属性来部分描述实体。 从感知组件的角度来看,杯子的描述可以用实体描述语言表示为:

虽然同一杯子的以控制器为中心的表示可以写成:

接口语言可与其他查询语言(例如SPARQL [16]和nRQL [17])的符号知识库相提并论。 这些查询语言功能强大,但缺少诸如KNOWROB2所采用的基于仿真的推理之类的复杂推理方法的集成。
许多相关的推论要求组合来自不同来源的不同类型的信息。例如,在抓起杯子之前,机器人可能会问我是否可以从当前位置抓起杯子,并且需要使用感知到的物体姿势来推断可能的抓握点,读取一些关节的位置,并通过反向来推断抓握能力运动学。大量数据(例如传感器数据)无法直接在符号知识库中表示。相反,必须使用特殊目的程序来查询数据(例如,读取传感器值)。 KNOWROB2允许将过程附加到所谓的可计算关系[1]上,该过程可将非符号数据透明地集成到推理过程中,并使查询在用户看来就像在使用符号知识库一样。例如,红色杯子可以用实体描述[对象,对象,[类型,杯子],[颜色,红色]]表示,并且可以使用实体谓词来推断其存在,该实体谓词在内部将机器人的内部数据结构,例如感知系统生成的对象假设。
6. 从情节记忆中学习
情景记忆知识库中收集的NEEM用于学习常识。 尽管经典的以数据为中心的学习方法可以在某些情况下取得成功的结果(例如[18]),但机器人仍然距离执行人类规模的操纵任务还很远。 实现此级别的一种可能方法是用符号级别的结构化知识来增强现有方法,以便机器人可以自行形式化学习问题并从可用的NEEM生成训练数据集。
如果机器人在清洁桌子时感觉到桌子上有杯子,则可以使用以下查询来检索正的NEEM集合以捡起杯子:

然后,使用以下查询,从这些情节中获取功能:

上述查询的特征包括抓握开始时机器人与杯子的姿势信息。
有了这个数据集,机器人就可以了解抓握可能会在哪个有限区域中进行(如图6所示)。 为此,KNOWROB2提供了一个到Weka机器学习框架[19]的接口,从而提供了许多学习学习算法的接口,例如高斯混合模型。 此接口可用于应用标准方法来过滤不相关的特征,训练和保存分类器和注册表以及在给定新数据的情况下预测结果。
将机器学习技术集成到机器人知识处理系统中可以提供以下功能:学习领域问题需要什么样的数据,如何将不同的数据集集成在一起以及如何对学习结果进行基准测试。 例如,在迭代学习案例中,最新生成的轨迹并不总是比先前的轨迹更好。 机器人可以使用KNOWROB2来推测这种情况,而不是使用最新生成的轨迹,而要花更少的时间。 例如,通过从仿真中获得一些轨迹,机器人可以针对诸如持续时间和长度之类的因素进行推理和基准测试,然后执行最适合当前情况的轨迹。
7. 相关工作
数十年来,机器人的知识处理一直是研究的主题。 Shakey机器人[20]已经对其环境进行了内部表示。 从那时起,机器人就开始执行更复杂的任务,这些任务依赖于复杂的场景表示以及有关动作和对象的知识的大量增加。 在AI社区中,已经开发了许多针对个人推理问题的方法。 艾伦的时间间隔代数[21]专注于时间间隔的推理,而诸如PDDL [22]之类的语言旨在推理计划和目标。
以机器人为中心的方法,例如[23],通常缺乏对相关领域(例如时间推理)的支持,或者对空间和对象信息的表示不完整。 诸如Cyc [24]之类的百科全书知识库在表示相关概念(例如表示操纵活动)时通常缺乏必要的深度。 其他作者试图通过从网络资源中提取信息来自动获取百科全书知识[25],从而在专门领域提供知识。 在机器人技术界,许多研究都集中在使用概率模型[26]对不确定性进行建模,这些概率模型通常是针对单个模态(例如感知或本地化)而设计的,缺乏明确的语义。 更复杂的模型将空间和基础的语义表示[27]或几何和概念性空间表示与规划和学习技术结合在一起[28]。
8. 总结
在本文中,我们对知识处理框架KNOWROB2进行了概述。 显然,应该根据框架可以执行的推理任务和所获得的知识来衡量框架的性能。 我们已经报告了KNOWROB2可以完成的一些推理任务,并将其与其他机器人知识处理系统区分开来。 这些任务包括基于模拟的推理,使用内部世界模型的视觉推理以及从情景记忆中学习。 这些机制加在一起可以极大地提高机器人特工完成操纵任务的能力。 使用基于Web的知识服务OPENEASE可以试用许多这些功能。