本章参考资料:《STM32F76xxx参考手册》、《STM32F76xxx规格书》、库帮助文档《STM32F779xx_User_Manual.chm》及《SPI总线协议介绍》。
若对SPI通讯协议不了解,可先阅读《SPI总线协议介绍》文档的内容学习。
关于FLASH存储器,请参考“常用存储器介绍”章节,实验中FLASH芯片的具体参数,请参考其规格书《W25Q128》来了解。
24.1 QSPI协议简介
QSPI是Queued SPI的简写,是Motorola公司推出的SPI接口的扩展,比SPI应用更加广泛。在SPI协议的基础上,Motorola公司对其功能进行了增强,增加了队列传输机制,推出了队列串行外围接口协议(即QSPI协议)。QSPI 是一种专用的通信接口,连接单、双或四(条数据线) SPI Flash 存储介质。
该接口可以在以下三种模式下工作:
① 间接模式:使用 QSPI 寄存器执行全部操作
② 状态轮询模式:周期性读取外部 Flash 状态寄存器,而且标志位置 1 时会产生中断(如擦除或烧写完成,会产生中断)
③ 内存映射模式:外部 Flash 映射到微控制器地址空间,从而系统将其视作内部存储器
采用双闪存模式时,将同时访问两个 Quad-SPI Flash,吞吐量和容量均可提高二倍。
1.1.1 QSPI功能框图
QSPI功能框图,双闪存模式禁止见图 24- 1。

图 24- 1 QUADSPI 功能框图(双闪存模式禁止)
我们的开发板采用的是双闪存禁止的模式连接单片QSPI Flash。QSPI 使用 6 个信号连接Flash,分别是四个数据线BK1_IO0~BK1_IO3,一个时钟输出CLK,一个片选输出(低电平有效)BK1_nCS,它们的作用介绍如下:
(1) BK1_nCS:片选输出(低电平有效),适用于 FLASH 1。如果 QSPI 始终在双闪存模式下工作,则其也可用于 FLASH 2从设备选择信号线。QSPI通讯以BK1_nCS线置低电平为开始信号,以BK1_nCS线被拉高作为结束信号。
(2) CLK:时钟输出,适用于两个存储器,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如STM32的QSPI时钟频率最大为fpclk/2,两个设备之间通讯时,通讯速率受限于低速设备。
(3) BK1_IO0:在双线 / 四线模式中为双向 IO,单线模式中为串行输出,适用于FLASH 1。
(4) BK1_IO1:在双线 / 四线模式中为双向 IO,单线模式中为串行输入,适用于FLASH 1。
(5) BK1_IO2:在四线模式中为双向 IO,适用于 FLASH 1。
(6) BK1_IO3:在四线模式中为双向 IO,适用于 FLASH 1。
24.1.2 QSPI命令序列
QUADSPI 通过命令与 Flash 通信 每条命令包括指令、地址、交替字节、空指令和数据这五个阶段 任一阶段均可跳过,但至少要包含指令、地址、交替字节或数据阶段之一。nCS 在每条指令开始前下降,在每条指令完成后再次上升。先看看QSPI四线模式下的读命令时序,见图 24 -2。
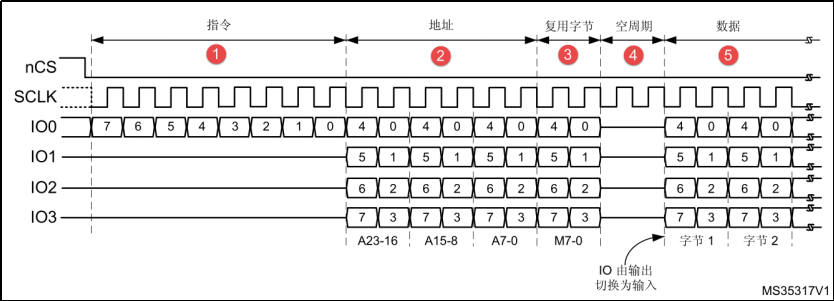
图 24- 2 四线模式下的读命令时序
1. 指令阶段
这一阶段,将在 QUADSPI_CCR[7:0] 寄存器的 INSTRUCTION 字段中配置的一条 8 位指令发送到 Flash,指定待执行操作的类型。
尽管大多数 Flash 从 IO0/SO 信号(单线 SPI 模式)只能以一次 1 位的方式接收指令,但指令阶段可选择一次发送 2 位(在双线 SPI 模式中通过 IO0/IO1)或一次发送 4 位(在四线SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过 QUADSPI_CCR[9:8] 寄存器中的 IMODE[1:0]字段进行配置。
若 IMODE = 00,则跳过指令阶段,命令序列从地址阶段(如果存在)开始。
1. 地址阶段
在地址阶段,将1-4字节发送到Flash,指示操作地址。待发送的地址字节数在QUADSPI_CCR[13:12]寄存器的ADSIZE[1:0]字段中进行配置。在间接模式和自动轮询模式下,待发送的地址字节在QUADSPI_AR寄存器的ADDRESS[31:0]中指定在内存映射模式下,则通过 AHB(来自于 Cortex ® 或 DMA)直接给出地址。地址阶段可一次发送1 位(在单线SPI模式中通过SO)、2位(在双线SPI模式中通过IO0/IO1)或4位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过QUADSPI_CCR[11:10]寄存器中的ADMODE[1:0]字段进行配置。
若 ADMODE = 00,则跳过地址阶段,命令序列直接进入下一阶段(如果存在)。
2. 交替字节阶段
在交替字节阶段,将 1-4 字节发送到 Flash,一般用于控制操作模式。待发送的交替字节数在 QUADSPI_CCR[17:16] 寄存器的 ABSIZE[1:0] 字段中进行配置。待发送的字节在QUADSPI_ABR 寄存器中指定。
交替字节阶段可一次发送 1 位(在单线 SPI 模式中通过 SO)、2 位(在双线 SPI 模式中通过 IO0/IO1)或 4 位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过QUADSPI_CCR[15:14] 寄存器中的 ABMODE[1:0] 字段进行配置。
若 ABMODE = 00,则跳过交替字节阶段,命令序列直接进入下一阶段(如果存在)。交替字节阶段存在仅需发送单个半字节而不是一个全字节的情况,比如采用双线模式并且仅使用两个周期发送交替字节时。在这种情况下,固件可采用四线模式 (ABMODE = 11) 并发送一个字节,方法是 ALTERNATE 的位 7 和 3 置“1”(IO3 保持高电平)且位 6 和 2 置“0”(IO2 线保持低电平)。此时,半字节的高 2 位存放在 ALTERNATE 的位 4:3,低 2位存放在位 1 和 0 中。例如,如果半字节 2 (0010) 通过 IO0/IO1 发送,则 ALTERNATE 应设置为 0x8A (1000_1010)。
3. 空指令周期阶段
在空指令周期阶段,给定的 1-31 个周期内不发送或接收任何数据,目的是当采用更高的时钟频率时,给 Flash 留出准备数据阶段的时间。这一阶段中给定的周期数在QUADSPI_CCR[22:18] 寄存器的 DCYC[4:0] 字段中指定。在 SDR 和 DDR 模式下,持续时间被指定为一定个数的全时钟周期。若 DCYC 为零,则跳过空指令周期阶段,命令序列直接进入数据阶段(如果存在)。空指令周期阶段的操作模式由 DMODE 确定。为确保数据信号从输出模式转变为输入模式有足够的“周转”时间,使用双线和四线模式从Flash 接收数据时,至少需要指定一个空指令周期。
4. 数据阶段
在数据阶段,可从 Flash 接收或向其发送任意数量的字节。
在间接模式和自动轮询模式下,待发送/接收的字节数在 QUADSPI_DLR 寄存器中指定。在间接写入模式下,发送到 Flash 的数据必须写入 QUADSPI_DR 寄存器。在间接读取模式下,通过读取 QUADSPI_DR 寄存器获得从 Flash 接收的数据。在内存映射模式下,读取的数据通过 AHB 直接发送回 Cortex 或 DMA。数据阶段可一次发送/接收 1 位(在单线 SPI 模式中通过 SO)、2 位(在双线 SPI 模式中通过 IO0/IO1)或 4 位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过QUADSPI_CCR[15:14] 寄存器中的 ABMODE[1:0] 字段进行配置。若 DMODE = 00,则跳过数据阶段,命令序列在拉高 nCS 时立即完成。这一配置仅可用于仅间接写入模式。
24.2 QUADSPI 信号接口协议模式
24.2.1 单线 SPI 模式
传统 SPI 模式允许串行发送/接收单独的 1 位。在此模式下,数据通过 SO 信号(其 I/O 与IO0 共享)发送到 Flash。从 Flash 接收到的数据通过 SI(其 I/O 与 IO1 共享)送达。通过将(QUADSPI_CCR 中的)IMODE/ADMODE/ABMODE/DMODE 字段设置为 01,可对不同的命令阶段分别进行配置,以使用此单个位模式。在每个已配置为单线模式的阶段中:
- IO0 (SO) 处于输出模式
- IO1 (SI) 处于输入模式(高阻抗)
- IO2 处于输出模式并强制置“0”(以禁止“写保护”功能)
- IO3 处于输出模式并强制置“1”(以禁止“保持”功能)
若 DMODE = 01,这对于空指令阶段也同样如此。
24.2.2 双线 SPI 模式
在双线模式下,通过 IO0/IO1 信号同时发送/接收两位。通过将 QUADSPI_CCR 寄存器的 IMODE/ADMODE/ABMODE/DMODE 字段设置为 10,可对不同的命令阶段分别进行配置,以使用双线 SPI 模式。在每个已配置为单线模式的阶段中:
- IO0/IO1 在数据阶段进行读取操作时处于高阻态(输入),在其他情况下为输出
- IO2 处于输出模式并强制置“0”
- IO3 处于输出模式并强制置“1”
在空指令阶段,若 DMODE = 01,则 IO0/IO1 始终保持高阻态。
24.2.3 四线 SPI 模式
在四线模式下,通过 IO0/IO1/IO2/IO3 信号同时发送/接收四位。通过将 QUADSPI_CCR 寄存器的 IMODE/ADMODE/ABMODE/DMODE 字段设置为 11,可对不同的命令阶段分别进行配置,以使用四线 SPI 模式。在每个已配置为四线模式的阶段中,IO0/IO1/IO2/IO3 在数据阶段进行读取操作时均处于高阻态(输入),在其他情况下为输出。在空指令阶段中,若 DMODE = 11,则 IO0/IO1/IO2/IO3 均为高阻态。IO2 和 IO3 仅用于 Quad SPI 模式 如果未配置任何阶段使用四线 SPI 模式,即使 UADSPI激活,对应 IO2 和 IO3 的引脚也可用于其他功能。
24.2.4 SDR 模式
默认情况下,DDRM 位 (QUADSPI_CCR[31]) 为 0,QUADSPI 在单倍数据速率 (SDR) 模式下工作。在 SDR 模式下,当 QUADSPI 驱动 IO0/SO、IO1、IO2、IO3 信号时,这些信号仅在 CLK的下降沿发生转变。在 SDR 模式下接收数据时,QUADSPI 假定 Flash 也通过 CLK 的下降沿发送数据。默认情况下 (SSHIFT = 0 时),将使用 CLK 后续的边沿(上升沿)对信号进行采样。
24.2.5 DDR 模式
若 DDRM 位 (QUADSPI_CCR[31]) 置 1,则 QUADSPI 在双倍数据速率 (DDR) 模式下工作。在 DDR 模式下,当 QUADSPI 在地址/交替字节/数据阶段驱动 IO0/SO、IO1、IO2、IO3 信号时,将在 CLK 的每个上升沿和下降沿发送 1 位。指令阶段不受 DDRM 的影响。始终通过 CLK 的下降沿发送指令。在 DDR 模式下接收数据时,QUADSPI 假定 Flash 通过 CLK 的上升沿和下降沿均发送数据。若 DDRM = 1,固件必须清零 SSHIFT 位 (QUADSPI_CR[4])。因此,在半个 CLK 周期后(下一个反向边沿)对信号采样。四线模式下DDR命令时序见图 24 -3。
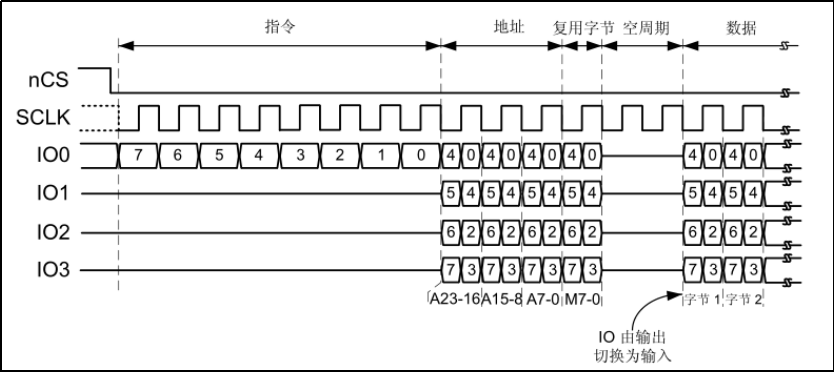
图 24- 3 四线模式下DDR命令时序
24.2.6 双闪存模式
若 DFM 位 (QUADSPI_CR[6]) 为 1,QUADSPI 处于双闪存模式。QUADSPI 使用两个外部四线 SPI Flash(FLASH 1 和 FLASH 2),在每个周期中发送/接收 8 位(在 DDR 模式下为16 位),能够有效地将吞吐量和容量扩大一倍。每个 Flash 使用同一个 CLK 并可选择使用同一个 nCS 信号,但其 IO0、IO1、IO2 和 IO3 信号是各自独立的。双闪存模式可与单比特模式、双比特模式以及四比特模式结合使用,也可与 SDR 或 DDR 模
式相结合。Flash 的大小在 FSIZE[4:0] (QUADSPI_DCR[20:16]) 中指定,指定的值应能够反映 Flash 的总容量,即单个组件容量的 2 倍。如果地址 X 为偶数,QUADSPI 赋给地址 X 的字节是存放于 FLASH 1 的地址 X/2 中的字节,QUADSPI 赋给地址 X+1 的字节是存放于 FLASH 2 的地址 X/2 中的字节。也就是说,偶地址中的字节存储于 FLASH 1,奇地址中的字节存储于 FLASH 2。
在双闪存模式下读取 Flash 状态寄存器时,需要读取的字节数是单闪存模式下的 2 倍。这意味着在状态寄存器获取指令到达后,如果每个 Flash 给出 8 个有效位,则 QUADSPI 必须配置为 2 个字节(16 位)的数据长度,它将从每个 Flash 接收 1 个字节。如果每个 Flash 给出一个 16 位的状态,则 QUADSPI 必须配置为读取 4 字节,以在双闪存模式下可获取两个Flash 的所有状态位。结果(在数据寄存器中)的最低有效字节是 FLASH 1 状态寄存器的最低有效字节,而下一个字节是 FLASH 2 状态寄存器的最低有效字节。数据寄存器的第三个字节是 FLASH 1 的第二个字节,第四个字节是 FLASH 2 的第二个字节(Flash 具有 16 位状态寄存器时)。
偶数个字节必须始终在双闪存模式下访问。因此,若 DRM = 1,则数据长度字段(QUADSPI_DLR[0]) 的位 0 始终保持为 1。
在双闪存模式下,FLASH 1 接口信号的行为基本上与正常模式下相同。在指令、地址、交替字节以及空指令周期阶段,FLASH 2 接口信号具有与 FLASH 1 接口信号完全相同的波形。也就是说,每个 Flash 总是接收相同的指令与地址。然后,在数据阶段,BK1_IOx 和BK2_IOx 总线并行传输数据,但发送到 FLASH 1(或从其接收)的数据与 FLASH 2 中的不同。
24.3 QUADSPI 间接模式
在间接模式下,通过写入 QUADSPI 寄存器来触发命令;并通过读写数据寄存器来传输数据,就如同对待其他通信外设那样。
若 FMODE = 00 (QUADSPI_CCR[27:26]),则 QUADSPI 处于间接写入模式,字节在数据阶段中发送到 Flash。通过写入数据寄存器 (QUADSPI_DR) 的方式提供数据。
若 FMODE = 01,则 QUADSPI 处于间接读取模式,在数据阶段中从 Flash 接收字节。通过读取 QUADSPI_DR 来获取数据。
读取/写入的字节数在数据长度寄存器 QUADSPI_DLR) 中指定。
如果 QUADSPI_DLR =0xFFFF_FFFF(全为“1”),则数据长度视为未定义,QUADSPI 将继续传输数据,直到到达(由 FSIZE 定义的)Flash 的结尾。如果不传输任何字节,DMODE (QUADSPI_CCR[25:24])应设置为 00。如果 QUADSPI_DLR = 0xFFFF_FFFF 并且 FSIZE = 0x1F(最大值指示一个 4GB 的Flash),在此特殊情况下,传输将无限继续下去,仅在出现终止请求或 QUADSPI 被禁止后停止。在读取最后一个存储器地址后(地址为 0xFFFF_FFFF),将从地址 = 0x0000_0000开始继续读取。
当发送或接收的字节数达到编程设定值时,如果 TCIE = 1,则 TCF 置 1 并产生中断。在数据数量不确定的情况下,将根据 QUADSPI_CR 中定义的 Flash 大小,在达到外部 SPI 的限制时,TCF 置 1。
24.3.1 触发命令启动
从本质上讲,在固件给出命令所需的最后一点信息时,命令即会启动。根据 QUADSPI 的配置,在间接模式下有三种触发命令启动的方式。在出现以下情形时,命令立即启动:
1、 对 INSTRUCTION[7:0] (QUADSPI_CCR) 执行写入操作,如果没有地址是必需的(当ADMODE = 00)并且不需要固件提供数据(当 FMODE = 01 或 DMODE = 00);
2、 对 ADDRESS[31:0] (QUADSPI_AR) 执行写入操作,如果地址是必需的(当 ADMODE =00)并且不需要固件提供数据 (当 FMODE = 01 或 DMODE = 00);
3、 对 DATA[31:0] (QUADSPI_DR) 执行写入操作,如果地址是必需的(当 ADMODE != 00)并且需要固件提供数据(当 FMODE = 00 并且 DMODE != 00)。
写入交替字节寄存器 (QUADSPI_ABR) 始终不会触发命令启动。如果需要交替字节,必须预先进行编程。如果命令启动,BUSY 位(QUADSPI_SR 的位 5)将自动置 1。
24.3.2 FIFO 和数据管理
在间接模式中,数据将通过 QUADSPI 内部的一个 32 字节 FIFO。FLEVEL[5:0](QUADSPI_SR[13:8]) 指示 FIFO 目前保存了多少字节。
在间接写入模式下 (FMODE = 00),固件写入 QUADSPI_DR 时,将在 FIFO 中加入数据。字写入将在 FIFO 中增加 4 个字节,半字写入增加 2 个字节,而字节写入仅增加 1 个字节。如果固件在 FIFO 中加入的数据过多(超过 DL[31:0] 指示的值),将在写入操作结束(TCF置 1)时从 FIFO 中清除超出的字节。
对 QUADSPI_DR 的字节/半字访问必须仅针对该 32 位寄存器的最低有效字节/半字。FTHRES[3:0] 用于定义 FIFO 的阈值 如果达到阈值,FTF(FIFO 阈值标志)置 1 在间接读取模式下,从 FIFO 中读取的有效字节数超过阈值时,FTF 置 1。从 Flash 中读取最后一个字节后,如果 FIFO 中依然有数据,则无论 FTHRES 的设置为何,FTF 也都会置 1。在间接写入模式下,当 FIFO 中的空字节数超过阈值时,FTF 置 1。
如果 FTIE = 1,则 FTF 置 1 时产生中断。如果 DMAEN = 1,则 FTF 置 1 时启动数据传送。如果阈值条件不再为“真”(CPU 或 DMA 传输了足够的数据后),则 FTF 由 HW 清零。在间接模式下,当 FIFO 已满,QUADSPI 将暂时停止从 Flash 读取字节以避免上溢。请注意,只有在 FIFO 中的 4 个字节为空 (FLEVEL ≤ 11) 时才会重新开始读取 Flash。因此,若FTHRES ≥ 13,应用程序必须读取足够的字节以确保 QUADSPI 再次从 Flash 检索数据。否则,只要 11 < FLEVEL < FTHRES,FTF 标志将保持为“0”。
24.4 QUADSPI Flash 配置
外部 SPI Flash的参数可以通过配置寄存器 (QUADSPI_DCR)实现。这里配置Flash的容量是设置FSIZE[4:0] 字段,使用下面的公式定义外部存储器的大小:
FSIZE+1 是对 Flash 寻址所需的地址位数。在间接模式下,Flash 容量最高可达 4GB(使用32 位进行寻址),但在内存映射模式下的可寻址空间限制为 256MB。如果 DFM = 1,FSIZE 表示两个 Flash 容量的总和。QUADSPI 连续执行两条命令时,它在两条命令之间将片选信号 (nCS) 置为高电平默认仅一个 CLK 周期时长。如果 Flash 需要命令之间的时间更长,可使用片选高电平时间 (CSHT) 字段指定 nCS 必须保持高电平的最少 CLK 周期数(最大为 8)。时钟模式 (CKMODE) 位指示命令之间的 CLK 信号逻辑电平(nCS = 1 时)。
24.5 QSPI初始化结构体详解
跟其它外设一样,STM32 HAL库提供了QSPI初始化结构体及初始化函数来配置SPI外设。初始化结构体及函数定义在库文件“stm32f7xx_hal_spi.h”及“stm32f7xx_hal _spi.c”中,编程时我们可以结合这两个文件内的注释使用或参考库帮助文档。了解初始化结构体后我们就能对SPI外设运用自如了,见代码清单 24 1。
代码清单 24 1 QSPI_InitTypeDef初始化结构体
1 typedef struct {
2 uint32_t ClockPrescaler; //预分频因子
3 uint32_t FifoThreshold; //FIFO中的阈值
4 uint32_t SampleShifting; //采样移位
5 uint32_t FlashSize; //Flash大小
6 uint32_t ChipSelectHighTime; //片选高电平时间
7 uint32_t ClockMode; //时钟模式
8 uint32_t FlashID; //Flash ID
9 uint32_t DualFlash; //双闪存模式
10 } QSPI_InitTypeDef;
这些结构体成员说明如下,其中括号内的文字是对应参数在STM32 HAL库中定义的宏:
(1) ClockPrescaler
本成员设置预分频因子,对应寄存器QUADSPI_CR [31:24]即PRESCALER[7:0],取值范围是0—255,可以实现1—256级别的分频。仅可在 BUSY = 0 时修改该字段。
(2) FifoThreshold
本成员设置FIFO 阈值级别,对应寄存器QUADSPI_CR [12:8]即FTHRES[4:0],定义在间接模式下 FIFO 中将导致 FIFO 阈值标志(FTF,QUADSPI_SR[2])置 1 的字节数阈值。
(3) SampleShifting
本成员设置采样,对应寄存器QUADSPI_CR [4],默认情况下,QUADSPI 在 Flash 驱动数据后过半个 CLK 周期开始采集数据。使用该位,可考虑外部信号延迟,推迟数据采集。可以取值0:不发生移位;1:移位半个周期。在 DDR 模式下 (DDRM = 1),固件必须确保 SSHIFT = 0。
(4) FlashSize
本成员设置FLASH大小,对应寄存器QUADSPI_CCR [20:16]的FSIZE[4:0]位。定义外部存储器的大小,简介模式Flash容量最高可达4GB(32位寻址),但是在内存映射模式下限制为256MB,如果是双闪存则可以达到512MB。
(5) ChipSelectHighTime
本成员设置片选高电平时间,对应寄存器QUADSPI_CR [10:8]的CSHT[2:0]位,定义片选 (nCS) 在发送至 Flash 的命令之间必须保持高电平的最少 CLK 周期数。可以取值1~8个周期。
(6) ClockMode
本成员设置时钟模式,对应寄存器QUADSPI_CR [0]位,指示CLK在命令之间的电平,可以选模式0,1: nCS 为高电平(片选释放)时,CLK 必须保持低电平;或者模式3 ,1:nCS 为高电平(片选释放)时,CLK 必须保持高电平。
(7) FlashID
本成员用于选择Flash1或者Flash2,单闪存模式下选择需要访问的flash。
(8) DualFlash
本成员用于激活双闪存模式,0:禁止双闪存模式;1:使能双闪存模式。双闪存模式可以使系统吞吐量和容量扩大一倍。
代码清单 24 2 QSPI_CommandTypeDe通信配置命令结构体
1 typedef struct {
2 uint32_t Instruction; //指令
3 uint32_t Address; //地址
4 uint32_t AlternateBytes; //交替字节
5 uint32_t AddressSize; //地址长度
6 uint32_t AlternateBytesSize; //交替字节长度
7 uint32_t DummyCycles; //空指令周期
8 uint32_t InstructionMode; //指令模式
9 uint32_t AddressMode; //地址模式
10 uint32_t AlternateByteMode; //交替字节模式
11 uint32_t DataMode; //数据模式
12 uint32_t NbData; //数据长度
13 uint32_t DdrMode; //双倍数据速率模式
14 uint32_t DdrHoldHalfCycle; //DDR保持周期
15 uint32_t SIOOMode; //仅发送指令一次模式
16 } QSPI_CommandTypeDef;
这些结构体成员说明如下,其中括号内的文字是对应参数在STM32 HAL库中定义的宏:
(1) Instruction
本成员设置通信指令,指定要发送到外部 SPI 设备的指令。仅可在 BUSY = 0 时修改该字段。
(2) Address
本成员指定要发送到外部 Flash 的地址,BUSY = 0 或 FMODE = 11(内存映射模式)时,将忽略写入该字段。在双闪存模式下,由于地址始终为偶地址,ADDRESS[0] 自动保持为“0”。
(3) AlternateBytes
本成员指定要在地址后立即发送到外部 SPI 设备的可选数据,仅可在 BUSY = 0 时修改该字段。
(4) AddressSize
本成员定义地址长度,可以是8位,16位,24位或者32位。
(5) AlternateBytesSize
本成员定义交替字节长度,可以是8位,16位,24位或者32位。
(6) DummyCycles
本成员定义空指令阶段的持续时间,在 SDR 和 DDR 模式下,它指定 CLK 周期数 (0-31)。
(7) InstructionMode
本成员定义指令阶段的操作模式,00:无指令;01:单线传输指令;10:双线传输指令;11:四线传输指令。
(8) AddressMode
本成员定义地址阶段的操作模式,00:无地址;01:单线传输地址;10:双线传输地址;11:四线传输地址。
(9) AlternateByteMode
本成员定义交替字节阶段的操作模式00:无交替字节;01:单线传输交替字节;10:双线传输交替字节;11:四线传输交替字节。
(10) DataMode
本成员定义数据阶段的操作模式,00:无数据;01:单线传输数据;10:双线传输数据;11:四线传输数据。该字段还定义空指令阶段的操作模式。
(11) NbData
本成员设置数据长度,在间接模式和状态轮询模式下待检索的数据数量(值 + 1)。对状态轮询模式应使用不大于 3 的值(表示 4 字节)。
(12) DdrMode
本成员为地址、交替字节和数据阶段设置 DDR 模式,0:禁止 DDR 模式;1:使能 DDR 模式。
(13) DdrHoldHalfCycle
本成员设置DDR 模式下数据输出延迟 1/4 个 QUADSPI 输出时钟周期,0:使用模拟延迟来延迟数据输出;1:数据输出延迟 1/4 个 QUADSPI 输出时钟周期。仅在 DDR 模式下激活。
(14) SIOOMode
本成员设置仅发送指令一次模式,。IMODE = 00 时,该位不起作用。0:在每个事务中发送指令;1:仅为第一条命令发送指令。
24.6 QSPI—读写串行FLASH实验
FLSAH存储器又称闪存,它与EEPROM都是掉电后数据不丢失的存储器,但FLASH存储器容量普遍大于EEPROM,现在基本取代了它的地位。我们生活中常用的U盘、SD卡、SSD固态硬盘以及我们STM32芯片内部用于存储程序的设备,都是FLASH类型的存储器。在存储控制上,最主要的区别是FLASH芯片只能一大片一大片地擦写,而在“I2C章节”中我们了解到EEPROM可以单个字节擦写。
本小节以一种使用QSPI通讯的串行FLASH存储芯片的读写实验为大家讲解STM32的QSPI使用方法。实验中STM32的QSPI外设采用主模式,通过查询事件的方式来确保正常通讯。
24.6.1 硬件设计
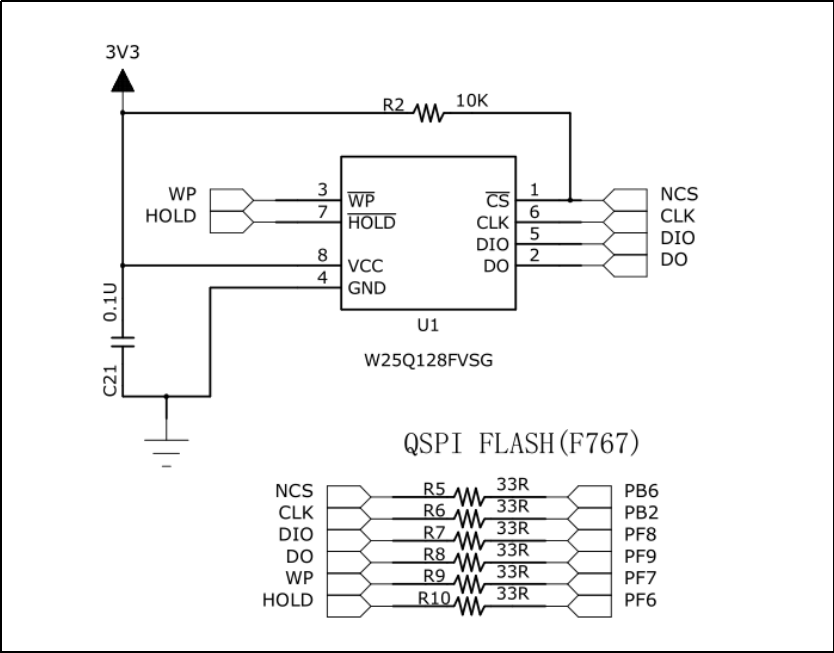
图 24 -4 SPI串行FLASH硬件连接图
本实验板中的FLASH芯片(型号:W25Q128)是一种使用QSPI/SPI通讯协议的NOR FLASH存储器,它的CS/CLK/D0/D1/D2/D3引脚分别连接到了STM32对应的QSPI引脚QUADSPI_BK1_NCS/ QUADSPI_CLK / QUADSPI_BK1_IO0/ QUADSPI_BK1_IO1/ QUADSPI_BK1_IO2/ QUADSPI_BK1_IO3上,这些引脚都是STM32的复用引脚。
关于FLASH芯片的更多信息,可参考其数据手册《W25Q128》来了解。若您使用的实验板FLASH的型号或控制引脚不一样,只需根据我们的工程修改即可,程序的控制原理相同。
24.6.2 软件设计
为了使工程更加有条理,我们把读写FLASH相关的代码独立分开存储,方便以后移植。在“工程模板”之上新建“bsp_qspi_flash.c”及“bsp_qspi_ flash.h”文件,这些文件也可根据您的喜好命名,它们不属于STM32 HAL库的内容,是由我们自己根据应用需要编写的。
1. 编程要点
(1) 初始化通讯使用的目标引脚及端口时钟;
(2) 使能SPI外设的时钟;
(3) 配置SPI外设的模式、地址、速率等参数并使能SPI外设;
(4) 编写基本SPI按字节收发的函数;
(5) 编写对FLASH擦除及读写操作的的函数;
(6) 编写测试程序,对读写数据进行校验。
2. 代码分析
控制FLASH的指令
FLASH芯片自定义了很多指令,我们通过控制STM32利用QSPI总线向FLASH芯片发送指令,FLASH芯片收到后就会执行相应的操作。
而这些指令,对主机端(STM32)来说,只是它遵守最基本的QSPI通讯协议发送出的数据,但在设备端(FLASH芯片)把这些数据解释成不同的意义,所以才成为指令。查看FLASH芯片的数据手册《W25Q128》,可了解各种它定义的各种指令的功能及指令格式,见表 24 -1。
表 24- 1 FLASH常用芯片指令表(摘自规格书《W25Q128》)
|
指令 |
第一字节(指令编码) |
第二字节 |
第三字节 |
第四字节 |
第五字节 |
第六字节 |
第七-N字节 |
|
Write Enable |
06h |
|
|
|
|
|
|
|
Write Disable |
04h |
|
|
|
|
|
|
|
Read Status Register |
05h |
(S7–S0) |
|
|
|
|
|
|
Write Status Register |
01h |
(S7–S0) |
|
|
|
|
|
|
Read Data |
03h |
A23–A16 |
A15–A8 |
A7–A0 |
(D7–D0) |
(Next byte) |
continuous |
|
Fast Read |
0Bh |
A23–A16 |
A15–A8 |
A7–A0 |
dummy |
(D7–D0) |
(Next Byte) continuous |
|
Fast Read Dual Output |
3Bh |
A23–A16 |
A15–A8 |
A7–A0 |
dummy |
I/O = (D6,D4,D2,D0) O = (D7,D5,D3,D1) |
(one byte per 4 clocks, continuous) |
|
Page Program |
02h |
A23–A16 |
A15–A8 |
A7–A0 |
D7–D0 |
Next byte |
Up to 256 bytes |
|
Block Erase(64KB) |
D8h |
A23–A16 |
A15–A8 |
A7–A0 |
|
|
|
|
Sector Erase(4KB) |
20h |
A23–A16 |
A15–A8 |
A7–A0 |
|
|
|
|
Chip Erase |
C7h |
|
|
|
|
|
|
|
Power-down |
B9h |
|
|
|
|
|
|
|
Release Power- down / Device ID |
ABh |
dummy |
dummy |
dummy |
(ID7-ID0) |
|
|
|
Manufacturer/ Device ID |
90h |
dummy |
dummy |
00h |
(M7-M0) |
(ID7-ID0) |
|
|
JEDEC ID |
9Fh |
(M7-M0) 生产厂商 |
(ID15-ID8) 存储器类型 |
(ID7-ID0) 容量 |
|
|
|
该表中的第一列为指令名,第二列为指令编码,第三至第N列的具体内容根据指令的不同而有不同的含义。其中带括号的字节参数,方向为FLASH向主机传输,即命令响应,不带括号的则为主机向FLASH传输。表中“A0~A23”指FLASH芯片内部存储器组织的地址;“M0~M7”为厂商号(MANUFACTURER ID);“ID0-ID15”为FLASH芯片的ID;“dummy”指该处可为任意数据;“D0~D7”为FLASH内部存储矩阵的内容。
在FLSAH芯片内部,存储有固定的厂商编号(M7-M0)和不同类型FLASH芯片独有的编号(ID15-ID0),见表 24 -2。
表 24- 2 FLASH数据手册的设备ID说明
|
FLASH型号 |
厂商号(M7-M0) |
FLASH型号(ID15-ID0) |
|
W25Q64 |
EF h |
4017 h |
|
W25Q128 |
EF h |
4018 h |
通过指令表中的读ID指令“JEDEC ID”可以获取这两个编号,该指令编码为“9F h”,其中“9F h”是指16进制数“9F” (相当于C语言中的0x9F)。紧跟指令编码的三个字节分别为FLASH芯片输出的“(M7-M0)”、“(ID15-ID8)”及“(ID7-ID0)” 。
此处我们以该指令为例,配合其指令时序图进行讲解,见图 24- 5。
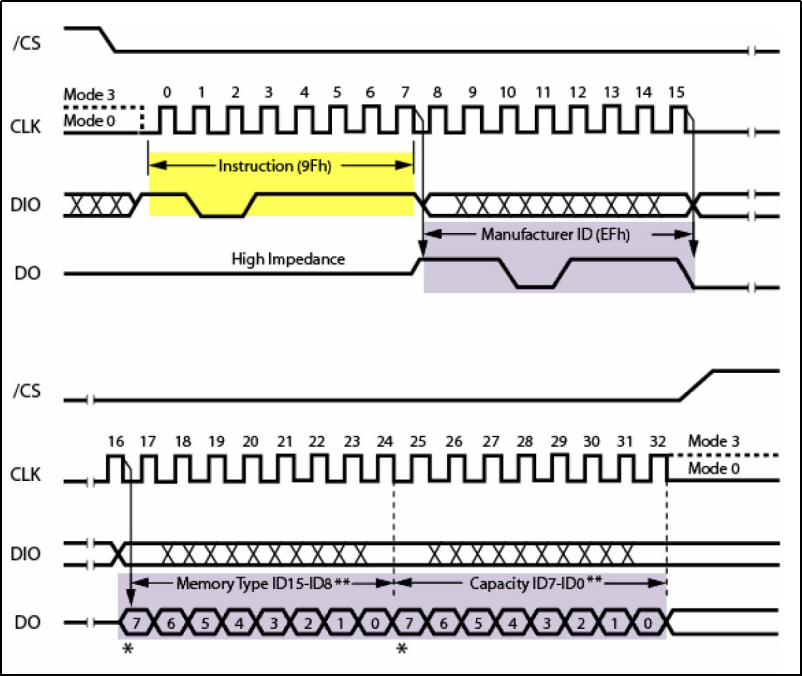
图 24 -5 FLASH读ID指令“JEDEC ID”的时序(摘自规格书《W25Q128》)
主机首先通过DIO(对应STM32的QUADSPI_BK1_IO0)线向FLASH芯片发送第一个字节数据为“9F h”,当FLASH芯片收到该数据后,它会解读成主机向它发送了“JEDEC指令”,然后它就作出该命令的响应:通过DO(对应STM32的QUADSPI_BK1_IO1)线把它的厂商ID(M7-M0)及芯片类型(ID15-0)发送给主机,主机接收到指令响应后可进行校验。常见的应用是主机端通过读取设备ID来测试硬件是否连接正常,或用于识别设备。
对于FLASH芯片的其它指令,都是类似的,只是有的指令包含多个字节,或者响应包含更多的数据。
实际上,编写设备驱动都是有一定的规律可循的。首先我们要确定设备使用的是什么通讯协议。如上一章的EEPROM使用的是I2C,本章的FLASH使用的是QSPI。那么我们就先根据它的通讯协议,选择好STM32的硬件模块,并进行相应的I2C或SPI模块初始化。接着,我们要了解目标设备的相关指令,因为不同的设备,都会有相应的不同的指令。如EEPROM中会把第一个数据解释为内部存储矩阵的地址(实质就是指令)。而FLASH则定义了更多的指令,有写指令,读指令,读ID指令等等。最后,我们根据这些指令的格式要求,使用通讯协议向设备发送指令,达到控制设备的目标。
定义FLASH指令编码表
为了方便使用,我们把FLASH芯片的常用指令编码使用宏来封装起来,后面需要发送指令编码的时候我们直接使用这些宏即可,见代码清单 24 -3。
代码清单 24 -3 FLASH指令编码表
1 /**
2 * @brief W25Q128FV 指令
3 */
4 /* 复位操作 */
5 #define RESET_ENABLE_CMD 0x66
6 #define RESET_MEMORY_CMD 0x99
7
8 #define ENTER_QPI_MODE_CMD 0x38
9 #define EXIT_QPI_MODE_CMD 0xFF
10
11 /* 识别操作 */
12 #define READ_ID_CMD 0x90
13 #define DUAL_READ_ID_CMD 0x92
14 #define QUAD_READ_ID_CMD 0x94
15 #define READ_JEDEC_ID_CMD 0x9F
16
17 /* 读操作 */
18 #define READ_CMD 0x03
19 #define FAST_READ_CMD 0x0B
20 #define DUAL_OUT_FAST_READ_CMD 0x3B
21 #define DUAL_INOUT_FAST_READ_CMD 0xBB
22 #define QUAD_OUT_FAST_READ_CMD 0x6B
23 #define QUAD_INOUT_FAST_READ_CMD 0xEB
24
25 /* 写操作 */
26 #define WRITE_ENABLE_CMD 0x06
27 #define WRITE_DISABLE_CMD 0x04
28
29 /* 寄存器操作 */
30 #define READ_STATUS_REG1_CMD 0x05
31 #define READ_STATUS_REG2_CMD 0x35
32 #define READ_STATUS_REG3_CMD 0x15
33
34 #define WRITE_STATUS_REG1_CMD 0x01
35 #define WRITE_STATUS_REG2_CMD 0x31
36 #define WRITE_STATUS_REG3_CMD 0x11
37
38
39 /* 编程操作 */
40 #define PAGE_PROG_CMD 0x02
41 #define QUAD_INPUT_PAGE_PROG_CMD 0x32
42 #define EXT_QUAD_IN_FAST_PROG_CMD 0x12
43
44 /* 擦除操作 */
45 #define SECTOR_ERASE_CMD 0x20
46 #define CHIP_ERASE_CMD 0xC7
47
48 #define PROG_ERASE_RESUME_CMD 0x7A
49 #define PROG_ERASE_SUSPEND_CMD 0x75
SPI硬件相关宏定义
我们把SPI硬件相关的配置都以宏的形式定义到 “bsp_qspi_ flash.h”文件中,见代码清单 24 4。
代码清单 24 4 SPI硬件配置相关的宏
1 #define QSPI_FLASH QUADSPI
2 #define QSPI_FLASH_CLK_ENABLE() __QSPI_CLK_ENABLE()
3
4 #define QSPI_FLASH_CLK_PIN GPIO_PIN_2
5 #define QSPI_FLASH_CLK_GPIO_PORT GPIOB
6 #define QSPI_FLASH_CLK_GPIO_ENABLE() __GPIOB_CLK_ENABLE()
7 #define QSPI_FLASH_CLK_GPIO_AF GPIO_AF9_QUADSPI
8
9 #define QSPI_FLASH_BK1_IO0_PIN GPIO_PIN_8
10 #define QSPI_FLASH_BK1_IO0_PORT GPIOF
11 #define QSPI_FLASH_BK1_IO0_CLK_ENABLE() __GPIOF_CLK_ENABLE()
12 #define QSPI_FLASH_BK1_IO0_AF GPIO_AF10_QUADSPI
13
14 #define QSPI_FLASH_BK1_IO1_PIN GPIO_PIN_9
15 #define QSPI_FLASH_BK1_IO1_PORT GPIOF
16 #define QSPI_FLASH_BK1_IO1_CLK_ENABLE() __GPIOF_CLK_ENABLE()
17 #define QSPI_FLASH_BK1_IO1_AF GPIO_AF10_QUADSPI
18
19 #define QSPI_FLASH_BK1_IO2_PIN GPIO_PIN_7
20 #define QSPI_FLASH_BK1_IO2_PORT GPIOF
21 #define QSPI_FLASH_BK1_IO2_CLK_ENABLE() __GPIOF_CLK_ENABLE()
22 #define QSPI_FLASH_BK1_IO2_AF GPIO_AF9_QUADSPI
23
24 #define QSPI_FLASH_BK1_IO3_PIN GPIO_PIN_6
25 #define QSPI_FLASH_BK1_IO3_PORT GPIOF
26 #define QSPI_FLASH_BK1_IO3_CLK_ENABLE() __GPIOF_CLK_ENABLE()
27 #define QSPI_FLASH_BK1_IO3_AF GPIO_AF9_QUADSPI
28
29 #define QSPI_FLASH_CS_PIN GPIO_PIN_6
30 #define QSPI_FLASH_CS_GPIO_PORT GPIOB
31 #define QSPI_FLASH_CS_GPIO_CLK_ENABLE() __GPIOB_CLK_ENABLE()
32 #define QSPI_FLASH_CS_GPIO_AF GPIO_AF10_QUADSPI
以上代码根据硬件连接,把与FLASH通讯使用的QSPI 、引脚号、引脚源以及复用功能映射都以宏封装起来。
初始化QSPI的 GPIO
利用上面的宏,编写QSPI的初始化函数,见代码清单 24- 5。
代码清单 24- 5 QSPI的初始化函数
1 /**
2 * @brief QSPI_FLASH引脚初始化
3 * @param 无
4 * @retval 无
5 */
6 void QSPI_FLASH_Init(void)
7 {
8
9 GPIO_InitTypeDef GPIO_InitStruct;
10
11 /* 使能 QSPI 及 GPIO 时钟 */
12 QSPI_FLASH_CLK_ENABLE();
13 QSPI_FLASH_CLK_GPIO_ENABLE();
14 QSPI_FLASH_BK1_IO0_CLK_ENABLE();
15 QSPI_FLASH_BK1_IO1_CLK_ENABLE();
16 QSPI_FLASH_BK1_IO2_CLK_ENABLE();
17 QSPI_FLASH_BK1_IO3_CLK_ENABLE();
18 QSPI_FLASH_CS_GPIO_CLK_ENABLE();
19
20 //设置引脚
21 /*!< 配置 QSPI_FLASH 引脚: CLK */
22 GPIO_InitStruct.Pin = QSPI_FLASH_CLK_PIN;
23 GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
24 GPIO_InitStruct.Pull = GPIO_NOPULL;
25 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
26 GPIO_InitStruct.Alternate = QSPI_FLASH_CLK_GPIO_AF;
27
28 HAL_GPIO_Init(QSPI_FLASH_CLK_GPIO_PORT, &GPIO_InitStruct);
29
30 /*!< 配置 QSPI_FLASH 引脚: IO0 */
31 GPIO_InitStruct.Pin = QSPI_FLASH_BK1_IO0_PIN;
32 GPIO_InitStruct.Alternate = QSPI_FLASH_BK1_IO0_AF;
33 HAL_GPIO_Init(QSPI_FLASH_BK1_IO0_PORT, &GPIO_InitStruct);
34
35 /*!< 配置 QSPI_FLASH 引脚: IO1 */
36 GPIO_InitStruct.Pin = QSPI_FLASH_BK1_IO1_PIN;
37 GPIO_InitStruct.Alternate = QSPI_FLASH_BK1_IO1_AF;
38 HAL_GPIO_Init(QSPI_FLASH_BK1_IO1_PORT, &GPIO_InitStruct);
39
40 /*!< 配置 QSPI_FLASH 引脚: IO2 */
41 GPIO_InitStruct.Pin = QSPI_FLASH_BK1_IO2_PIN;
42 GPIO_InitStruct.Alternate = QSPI_FLASH_BK1_IO2_AF;
43 HAL_GPIO_Init(QSPI_FLASH_BK1_IO2_PORT, &GPIO_InitStruct);
44
45 /*!< 配置 QSPI_FLASH 引脚: IO3 */
46 GPIO_InitStruct.Pin = QSPI_FLASH_BK1_IO3_PIN;
47 GPIO_InitStruct.Alternate = QSPI_FLASH_BK1_IO3_AF;
48 HAL_GPIO_Init(QSPI_FLASH_BK1_IO3_PORT, &GPIO_InitStruct);
49
50 /*!< 配置 SPI_FLASH_SPI 引脚: NCS */
51 GPIO_InitStruct.Pin = QSPI_FLASH_CS_PIN;
52 GPIO_InitStruct.Alternate = QSPI_FLASH_CS_GPIO_AF;
53 HAL_GPIO_Init(QSPI_FLASH_CS_GPIO_PORT, &GPIO_InitStruct);
54
55 /* QSPI_FLASH 模式配置 */
56 QSPIHandle.Instance = QUADSPI;
57 QSPIHandle.Init.ClockPrescaler = 2;
58 QSPIHandle.Init.FifoThreshold = 4;
59 QSPIHandle.Init.SampleShifting = QSPI_SAMPLE_SHIFTING_HALFCYCLE;
60 QSPIHandle.Init.FlashSize = 23;
61 QSPIHandle.Init.ChipSelectHighTime = QSPI_CS_HIGH_TIME_8_CYCLE;
62 QSPIHandle.Init.ClockMode = QSPI_CLOCK_MODE_0;
63 HAL_QSPI_Init(&QSPIHandle);
64 /*初始化QSPI接口*/
65 BSP_QSPI_Init();
66 }
与所有使用到GPIO的外设一样,都要先把使用到的GPIO引脚模式初始化,配置好复用功能。GPIO初始化流程如下:
(1) 使用GPIO_InitTypeDef定义GPIO初始化结构体变量,以便下面用于存储GPIO配置;
(2) 调用宏定义使能QSPI引脚使用的GPIO端口时钟和QSPI外设时钟。
(3) 向GPIO初始化结构体赋值,把CLK/IO0/IO1/IO2/IO3/NCS引脚初始化成复用推挽模式。
(4) 使用以上初始化结构体的配置,调用HAL_GPIO_Init函数向寄存器写入参数,完成GPIO的初始化。
(5) 以上只是配置了QSPI使用的引脚,对QSPI外设模式的配置。在配置STM32的QSPI模式前,我们要先了解从机端的QSPI模式。本例子中可通过查阅FLASH数据手册《W25Q128》获取。根据FLASH芯片的说明,它支持SPI模式0及模式3,支持四线模式,支持最高通讯时钟为104MHz,数据帧长度为8位。我们要把STM32的QSPI外设中的这些参数配置一致。见代码清单 24 -5。
(6) 配置QSPI接口模式;时钟三分频最高通讯时钟为72MHz(Flash最高支持104MHz);FIFO 阈值为 4 个字节;采样移位半个周期;SPI FLASH 大小;W25Q128 大小为16M 字节,即这里地址位数为23+1=24,所以取值23;片选高电平时间为 1个时钟(9.2*6=55.2ns),即手册里面的 ;时钟模式选择为0;根据硬件连接选择第一片Flash;最后调用HAL_QSPI_Init函数初始化QSPI模式。
初始化QSPI存储器
初始化好QSPI外设后,还要初始化初始化QSPI存储器,需要先复位存储器,使能写操作,配置状态寄存器才可进行数据读写操作,见代码清单 24 -6。
代码清单 24- 6初始化QSPI存储器
1 /**
2 * @brief 初始化QSPI存储器
3 * @retval QSPI存储器状态
4 */
5 uint8_t BSP_QSPI_Init(void)
6 {
7 QSPI_CommandTypeDef s_command;
8 uint8_t value = W25Q128FV_FSR_QE;
9
10 /* QSPI存储器复位 */
11 if (QSPI_ResetMemory() != QSPI_OK) {
12 return QSPI_NOT_SUPPORTED;
13 }
14
15 /* 使能写操作 */
16 if (QSPI_WriteEnable() != QSPI_OK) {
17 return QSPI_ERROR;
18 }
19 /* 设置四路使能的状态寄存器,使能四通道IO2和IO3引脚 */
20 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
21 s_command.Instruction = WRITE_STATUS_REG2_CMD;
22 s_command.AddressMode = QSPI_ADDRESS_NONE;
23 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
24 s_command.DataMode = QSPI_DATA_1_LINE;
25 s_command.DummyCycles = 0;
26 s_command.NbData = 1;
27 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
28 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
29 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
30 /* 配置命令 */
31if (HAL_QSPI_Command(&QSPIHandle, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK){
32 return QSPI_ERROR;
33 }
34 /* 传输数据 */
35if (HAL_QSPI_Transmit(&QSPIHandle, &value, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK){
36 return QSPI_ERROR;
37 }
38 /* 自动轮询模式等待存储器就绪 */
39 if (QSPI_AutoPollingMemReady(W25Q128FV_SUBSECTOR_ERASE_MAX_TIME) != QSPI_OK) {
40 return QSPI_ERROR;
41 }
42 return QSPI_OK;
43 }
使用QSPI读取大量数据
我们要从存取器中读取大量数据,首先要用一个指针指向读回来数据,并确定数据的首地址,数据大小,通过库函数HAL_QSPI_Command发送配置命令,然后调用库函数HAL_QSPI_Receive接收数据,最后等待操作完成,我们看看它的代码实现,见代码清单 24 7。
代码清单 24 7 使用QSPI读取大量数据
1 /**
2 * @brief 从QSPI存储器中读取大量数据.
3 * @param pData: 指向要读取的数据的指针
4 * @param ReadAddr: 读取起始地址
5 * @param Size: 要读取的数据大小
6 * @retval QSPI存储器状态
7 */
8 uint8_t BSP_QSPI_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size)
9 {
10 QSPI_CommandTypeDef s_command;
11 /* 初始化读命令 */
12 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
13 s_command.Instruction = READ_CMD;
14 s_command.AddressMode = QSPI_ADDRESS_1_LINE;
15 s_command.AddressSize = QSPI_ADDRESS_24_BITS;
16 s_command.Address = ReadAddr;
17 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
18 s_command.DataMode = QSPI_DATA_1_LINE;
19 s_command.DummyCycles = 0;
20 s_command.NbData = Size;
21 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
22 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
23 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
24
25 /* 配置命令 */
26if (HAL_QSPI_Command(&QSPIHandle, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK){
27 return QSPI_ERROR;
28 }
29
30 /* 接收数据 */
31 if(HAL_QSPI_Receive(&QSPIHandle, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE)!= HAL_OK) {
32 return QSPI_ERROR;
33 }
34 return QSPI_OK;
35 }
使用QSPI写入大量数据
我们要从存取器中写入大量数据,首先要用一个指针指写入数据,并确定数据的首地址,数据大小,根据写入地址及大小判断存储器的页面,然后通过库函数HAL_QSPI_Command发送配置命令,然后调用库函数HAL_QSPI_Transmit逐页写入数据,最后等待操作完成,我们看看它的代码实现,见代码清单 24 8。
代码清单 24 8 使用QSPI读取大量数据
1 /**
2 * @brief 将大量数据写入QSPI存储器
3 * @param pData: 指向要写入数据的指针
4 * @param WriteAddr: 写起始地址
5 * @param Size: 要写入的数据大小
6 * @retval QSPI存储器状态
7 */
8 uint8_t BSP_QSPI_Write(uint8_t* pData, uint32_t WriteAddr, uint32_t Size)
9 {
10 QSPI_CommandTypeDef s_command;
11 uint32_t end_addr, current_size, current_addr;
12 /* 计算写入地址和页面末尾之间的大小 */
13 current_addr = 0;
14
15 while (current_addr <= WriteAddr) {
16 current_addr += W25Q128FV_PAGE_SIZE;
17 }
18 current_size = current_addr - WriteAddr;
19
20 /* 检查数据的大小是否小于页面中的剩余位置 */
21 if (current_size > Size) {
22 current_size = Size;
23 }
24
25 /* 初始化地址变量 */
26 current_addr = WriteAddr;
27 end_addr = WriteAddr + Size;
28
29 /* 初始化程序命令 */
30 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
31 s_command.Instruction = QUAD_INPUT_PAGE_PROG_CMD;
32 s_command.AddressMode = QSPI_ADDRESS_1_LINE;
33 s_command.AddressSize = QSPI_ADDRESS_24_BITS;
34 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
35 s_command.DataMode = QSPI_DATA_4_LINES;
36 s_command.DummyCycles = 0;
37 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
38 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
39 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
40
41 /* 逐页执行写入 */
42 do {
43 s_command.Address = current_addr;
44 s_command.NbData = current_size;
45
46 /* 启用写操作 */
47 if (QSPI_WriteEnable() != QSPI_OK) {
48 return QSPI_ERROR;
49 }
50
51 /* 配置命令 */
52if(HAL_QSPI_Command(&QSPIHandle, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK) {
53 return QSPI_ERROR;
54 }
55
56 /* 传输数据 */
57if(HAL_QSPI_Transmit(&QSPIHandle, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK) {
58 return QSPI_ERROR;
59 }
60
61 /* 配置自动轮询模式等待程序结束 */
62 if(QSPI_AutoPollingMemReady(HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != QSPI_OK) {
63 return QSPI_ERROR;
64 }
65
66 /* 更新下一页编程的地址和大小变量 */
67 current_addr += current_size;
68 pData += current_size;
69current_size = ((current_addr + W25Q128FV_PAGE_SIZE) > end_addr) ? (end_addr-current_addr) :
70 W25Q128FV_PAGE_SIZE;
71 } while (current_addr < end_addr);
72 return QSPI_OK;
73 }
读取FLASH芯片ID
根据“JEDEC”指令的时序,我们把读取FLASH ID的过程编写成一个函数,见代码清单 24 9。
代码清单 24 9 读取FLASH芯片ID
1 /**
2 * @brief 读取FLASH ID
3 * @param 无
4 * @retval FLASH ID
5 */
6 uint32_t QSPI_FLASH_ReadID(void)
7 {
8 QSPI_CommandTypeDef s_command;
9 uint32_t Temp = 0;
10 uint8_t pData[3];
11 /* 读取JEDEC ID */
12 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
13 s_command.Instruction = READ_JEDEC_ID_CMD;
14 s_command.AddressMode = QSPI_ADDRESS_1_LINE;
15 s_command.AddressSize = QSPI_ADDRESS_24_BITS;
16 s_command.DataMode = QSPI_DATA_1_LINE;
17 s_command.AddressMode = QSPI_ADDRESS_NONE;
18 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
19 s_command.DummyCycles = 0;
20 s_command.NbData = 3;
21 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
22 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
23 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
24
25if(HAL_QSPI_Command(&QSPIHandle, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK) {
26 printf("something wrong .... ");
27 /* 用户可以在这里添加一些代码来处理这个错误 */
28 while (1) {
29
30 }
31 }
32 if(HAL_QSPI_Receive(&QSPIHandle, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE)!= HAL_OK) {
33 printf("something wrong .... ");
34 /* 用户可以在这里添加一些代码来处理这个错误 */
35 while (1) {
36
37 }
38 }
39
40 Temp = ( pData[2] | pData[1]<<8 )| ( pData[0]<<16 );
41
42 return Temp;
43 }
这段代码利用库函数HAL_QSPI_Command发送读取FLASH ID指令,再调用库函数HAL_QSPI_Receive读取3个字节,获取FLASH芯片对该指令的响应,最后把读取到的这3个数据合并到一个变量Temp中。然后然后作为函数返回值,把该返回值与我们定义的宏“sFLASH_ID”对比,即可知道FLASH芯片是否正常。
FLASH写使能以及读取当前状态
在向FLASH芯片存储矩阵写入数据前,首先要使能写操作,通过“Write Enable”命令即可写使能,见代码清单 24 -10。
代码清单 24- 10 写使能命令
1 /**
2 * @brief 发送写入使能,等待它有效.
3 * @param QSPIHandle: QSPI句柄
4 * @retval 无
5 */
6 static uint8_t QSPI_WriteEnable()
7 {
8 QSPI_CommandTypeDef s_command;
9 QSPI_AutoPollingTypeDef s_config;
10 /* 启用写操作 */
11 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
12 s_command.Instruction = WRITE_ENABLE_CMD;
13 s_command.AddressMode = QSPI_ADDRESS_NONE;
14 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
15 s_command.DataMode = QSPI_DATA_NONE;
16 s_command.DummyCycles = 0;
17 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
18 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
19 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
20if(HAL_QSPI_Command(&QSPIHandle, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK){
21 return QSPI_ERROR;
22 }
23
24 /* 配置自动轮询模式等待写启用 */
25 s_config.Match = W25Q128FV_FSR_WREN;
26 s_config.Mask = W25Q128FV_FSR_WREN;
27 s_config.MatchMode = QSPI_MATCH_MODE_AND;
28 s_config.StatusBytesSize = 1;
29 s_config.Interval = 0x10;
30 s_config.AutomaticStop = QSPI_AUTOMATIC_STOP_ENABLE;
31
32 s_command.Instruction = READ_STATUS_REG1_CMD;
33 s_command.DataMode = QSPI_DATA_1_LINE;
34 s_command.NbData = 1;
35
36if(HAL_QSPI_AutoPolling(&QSPIHandle, &s_command, &s_config, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK){
37 return QSPI_ERROR;
38 }
39 return QSPI_OK;
40 }
与EEPROM一样,由于FLASH芯片向内部存储矩阵写入数据需要消耗一定的时间,并不是在总线通讯结束的一瞬间完成的,所以在写操作后需要确认FLASH芯片“空闲”时才能进行再次写入。为了表示自己的工作状态,FLASH芯片定义了一个状态寄存器,见图 24- 6。
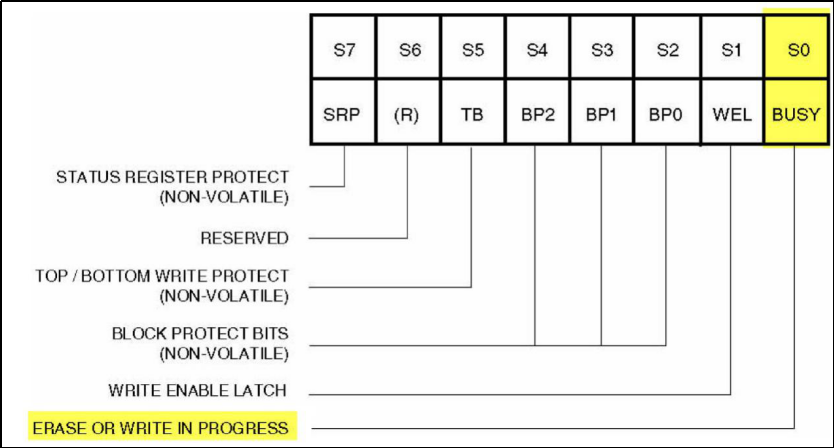
图 24- 6 FLASH芯片的状态寄存器
我们只关注这个状态寄存器的第0位“BUSY”,当这个位为“1”时,表明FLASH芯片处于忙碌状态,它可能正在对内部的存储矩阵进行“擦除”或“数据写入”的操作。
利用指令表中的“Read Status Register”指令可以获取FLASH芯片状态寄存器的内容,其时序见图 24- 7。
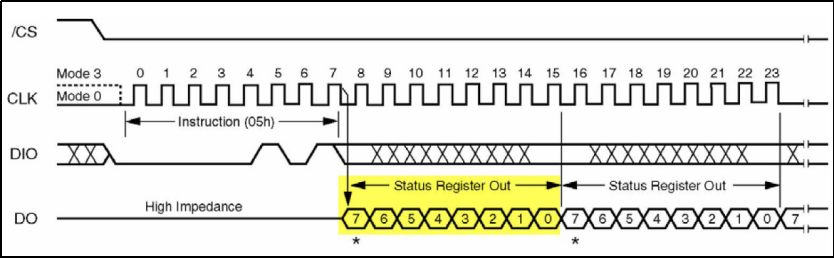
图 24 -7 读取状态寄存器的时序
只要向FLASH芯片发送了读状态寄存器的指令,FLASH芯片就会持续向主机返回最新的状态寄存器内容,直到收到SPI通讯的停止信号。HAL库提供了具有等待FLASH芯片写入结束功能的函数,见代码清单 24 11。
代码清单 24 11 通过读状态寄存器等待FLASH芯片空闲
1 /**
2 * @brief 读取存储器的SR并等待EOP
3 * @param QSPIHandle: QSPI句柄
4 * @param Timeout 超时
5 * @retval 无
6 */
7 static uint8_t QSPI_AutoPollingMemReady(uint32_t Timeout)
8 {
9 QSPI_CommandTypeDef s_command;
10 QSPI_AutoPollingTypeDef s_config;
11 /* 配置自动轮询模式等待存储器准备就绪 */
12 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
13 s_command.Instruction = READ_STATUS_REG1_CMD;
14 s_command.AddressMode = QSPI_ADDRESS_NONE;
15 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
16 s_command.DataMode = QSPI_DATA_1_LINE;
17 s_command.DummyCycles = 0;
18 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
19 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
20 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
21
22 s_config.Match = 0x00;
23 s_config.Mask = W25Q128FV_FSR_BUSY;
24 s_config.MatchMode = QSPI_MATCH_MODE_AND;
25 s_config.StatusBytesSize = 1;
26 s_config.Interval = 0x10;
27 s_config.AutomaticStop = QSPI_AUTOMATIC_STOP_ENABLE;
28
29 if (HAL_QSPI_AutoPolling(&QSPIHandle, &s_command, &s_config, Timeout) != HAL_OK) {
30 return QSPI_ERROR;
31 }
32 return QSPI_OK;
33 }
这段代码直接调用HAL_QSPI_AutoPolling库函数,设定命令参数及自动轮询参数,最后设定超时返回,如果在超时等待时间内确定FLASH就绪则返回存储器就绪状态,否则返回存储器错误。其实主要操作就是检查它的“W25Q128FV_FSR_BUSY”(即BUSY位),一直等待到该标志表示写入结束时才退出本函数,以便继续后面与FLASH芯片的数据通讯。
FLASH扇区擦除
由于FLASH存储器的特性决定了它只能把原来为“1”的数据位改写成“0”,而原来为“0”的数据位不能直接改写为“1”。所以这里涉及到数据“擦除”的概念,在写入前,必须要对目标存储矩阵进行擦除操作,把矩阵中的数据位擦除为“1”,在数据写入的时候,如果要存储数据“1”,那就不修改存储矩阵 ,在要存储数据“0”时,才更改该位。
通常,对存储矩阵擦除的基本操作单位都是多个字节进行,如本例子中的FLASH芯片支持“扇区擦除”、“块擦除”以及“整片擦除”,见表 24- 3。
表 24 -3 本实验FLASH芯片的擦除单位
|
擦除单位 |
大小 |
|
扇区擦除Sector Erase |
4KB |
|
块擦除Block Erase |
64KB |
|
整片擦除Chip Erase |
整个芯片完全擦除 |
FLASH芯片的最小擦除单位为扇区(Sector),而一个块(Block)包含16个扇区,其内部存储矩阵分布见图 24 -8。
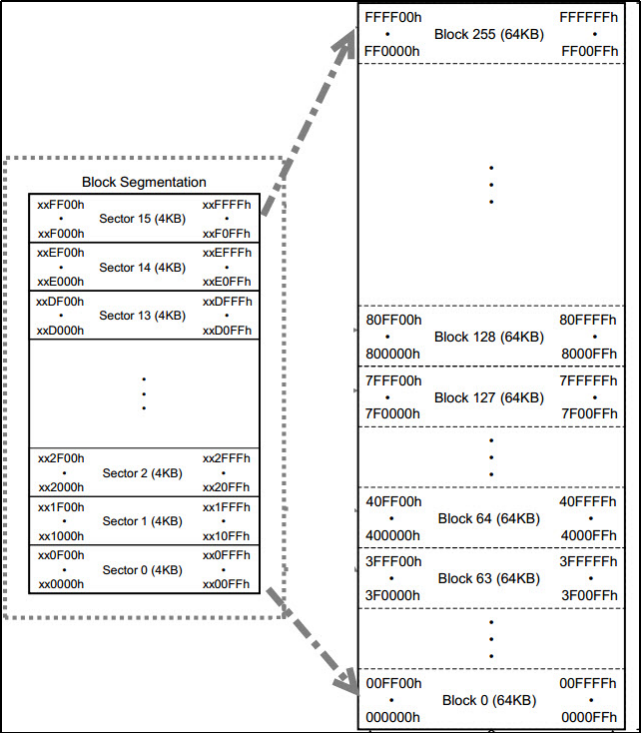
图 24- 8 FLASH芯片的存储矩阵
使用扇区擦除指令“Sector Erase”可控制FLASH芯片开始擦写,其指令时序见错误!未找到引用源。。

图 24- 9 扇区擦除时序
扇区擦除指令的第一个字节为指令编码,紧接着发送的3个字节用于表示要擦除的存储矩阵地址。要注意的是在扇区擦除指令前,还需要先发送“写使能”指令,发送扇区擦除指令后,通过读取寄存器状态等待扇区擦除操作完毕,代码实现见代码清单 24 -12。
代码清单 24 -12 擦除扇区
1 /**
2 * @brief 擦除QSPI存储器的指定块
3 * @param BlockAddress: 需要擦除的块地址
4 * @retval QSPI存储器状态
5 */
6 uint8_t BSP_QSPI_Erase_Block(uint32_t BlockAddress)
7 {
8 QSPI_CommandTypeDef s_command;
9 /* 初始化擦除命令 */
10 s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
11 s_command.Instruction = SECTOR_ERASE_CMD;
12 s_command.AddressMode = QSPI_ADDRESS_1_LINE;
13 s_command.AddressSize = QSPI_ADDRESS_24_BITS;
14 s_command.Address = BlockAddress;
15 s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
16 s_command.DataMode = QSPI_DATA_NONE;
17 s_command.DummyCycles = 0;
18 s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
19 s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
20 s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
21
22 /* 启用写操作 */
23 if (QSPI_WriteEnable() != QSPI_OK) {
24 return QSPI_ERROR;
25 }
26
27 /* 发送命令 */
28if(HAL_QSPI_Command(&QSPIHandle, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK) {
29 return QSPI_ERROR;
30 }
31
32 /* 配置自动轮询模式等待擦除结束 */
33 if (QSPI_AutoPollingMemReady(W25Q128FV_SUBSECTOR_ERASE_MAX_TIME) != QSPI_OK) {
34 return QSPI_ERROR;
35 }
36 return QSPI_OK;
37 }
3. main函数
最后我们来编写main函数,进行FLASH芯片读写校验,见错误!未找到引用源。。
代码清单 24 13 main函数
1 int main(void)
2 {
3 /* 使能指令缓存 */
4 SCB_EnableICache();
5
6 /* 使能数据缓存 */
7 SCB_EnableDCache();
8
9 /* 设定系统时钟为216MHz */
10 SystemClock_Config();
11
12 LED_GPIO_Config();
13 LED_BLUE;
14
15 /* 配置串口1为:115200 8-N-1 */
16 DEBUG_USART_Config();
17
18 printf(" 这是一个16M串行flash(W25Q128)实验(QSPI驱动) ");
19
20 /* 16M串行flash W25Q128初始化 */
21 QSPI_FLASH_Init();
22
23 /* 获取 Flash Device ID */
24 DeviceID = QSPI_FLASH_ReadDeviceID();
25
26 Delay( 200 );
27
28 /* 获取 SPI Flash ID */
29 FlashID = QSPI_FLASH_ReadID();
30
31 printf(" FlashID is 0x%X, Manufacturer Device ID is 0x%X ", FlashID, DeviceID);
32
33 /* 检验 SPI Flash ID */
34 if (FlashID == sFLASH_ID) {
35 printf(" 检测到QSPI FLASH W25Q128 ! ");
36
37 /* 擦除将要写入的 QSPI FLASH 扇区,FLASH写入前要先擦除 */
38 BSP_QSPI_Erase_Block(FLASH_SectorToErase);
39
40 /* 将发送缓冲区的数据写到flash中 */
41 BSP_QSPI_Write(Tx_Buffer, FLASH_WriteAddress, BufferSize);
42 printf(" 写入的数据为: %s", Tx_Buffer);
43
44 /* 将刚刚写入的数据读出来放到接收缓冲区中 */
45 BSP_QSPI_Read(Rx_Buffer, FLASH_ReadAddress, BufferSize);
46 printf(" 读出的数据为: %s", Rx_Buffer);
47
48 /* 检查写入的数据与读出的数据是否相等 */
49 TransferStatus1 = Buffercmp(Tx_Buffer, Rx_Buffer, BufferSize);
50
51 if ( PASSED == TransferStatus1 ) {
52 LED_GREEN;
53 printf(" 16M串行flash(W25Q128)测试成功! ");
54 } else {
55 LED_RED;
56 printf(" 16M串行flash(W25Q128)测试失败! ");
57 }
58 }// if (FlashID == sFLASH_ID)
59 else {
60 LED_RED;
61 printf(" 获取不到 W25Q128 ID! ");
62 }
63
64 while (1);
65 }
函数中初始化了系统时钟、LED、串口SPI外设,然后读取FLASH芯片的ID进行校验,若ID校验通过则向FLASH的特定地址写入测试数据,然后再从该地址读取数据,测试读写是否正常。
注意:
由于实验板上的FLASH芯片默认已经存储了特定用途的数据,如擦除了这些数据会影响到某些程序的运行。所以我们预留了FLASH芯片的“第0扇区(0-4096地址)”专用于本实验,如非必要,请勿擦除其它地址的内容。如已擦除,可在配套资料里找到“刷外部FLASH内容”程序,根据其说明给FLASH重新写入出厂内容。
24.6.3 下载验证
用USB线连接开发板“USB TO UART”接口跟电脑,在电脑端打开串口调试助手,把编译好的程序下载到开发板。在串口调试助手可看到FLASH测试的调试信息。