线段树入门教程
线段树往往会是各位OIer接触的第一种玄学数据结构,awa这东西很不好理解,但确实很有用。我还是争取写一篇对刚入门的新手友好的文章对线段树加一说明,手把手教大家写线段树。
线段树是什么?
二叉树大家知道吗?就是每一个节点会有左右两个子节点,子节点又有子节点……总起来就是二叉树。二叉树在玄学数据结构中会经常用到,比如splay,treap,乃至红黑树等等魔法玩意。这些不用管,就了解一下二叉树就好了。
很好理解对吗?
线段树就是基于二叉树的一种数据结构,用于解决在一段区间上修改和查询的问题。
画一张易于理解的图
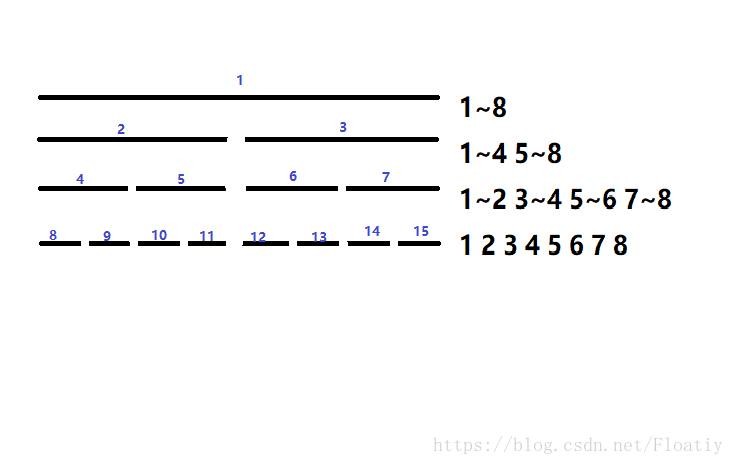
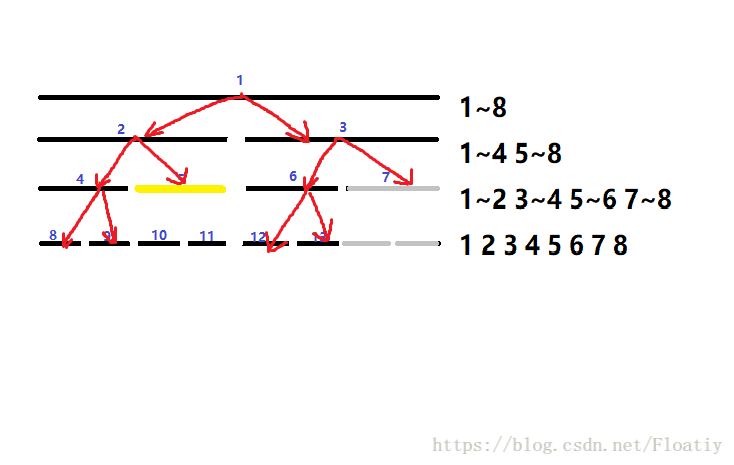
好吧我承认图画的吃藕。。蓝色是小标号,忽略就好了。
线段树的本质,就是将一段区间(图中的1~8)经过多次二分,拆成一个一个的单点(图中的1 2 3 4 5 6 7 8)
嗯没错这个就是线段树
为什么选择线段树?
因为快。。。
举个例子,比如我们要将2~5号点加上1,朴素做法是一个一个相加,时间复杂度为O(n),而我们如果使用线段树,会是这样操作的:
我们从线段树的顶端开始;
如果当前枚举到的区间被要加v的区间完全包含,就在这个区间进行加法操作,把这个区间加上要加的数v乘上这段区间的元素(点)个数,再记录一下这段区间被加过v,就不再往下枚举了。
如果不被完全包含,就接着二分,枚举当前这一段的前半段和后半段
这个就是线段树的原理辣,努力理解一下。
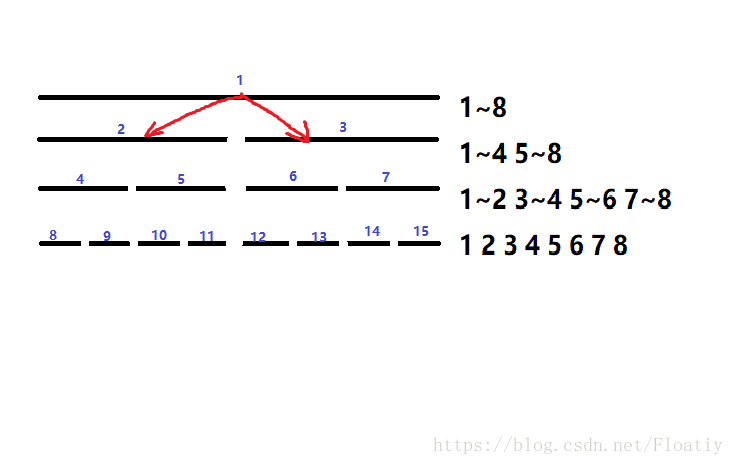
还是拿1~8那个图举例子。
我们从最上面开始,发现当前枚举到的区间是1~8,而要修改的区间是2~5,并没有完全包含,于是我们开始枚举它的前半段和后半段(1~4和5~8)。
再枚举1~4和5~8,发现仍没有被2~5完全包含,所以继续二分,枚举1~2,3~4,5~6,7~8.
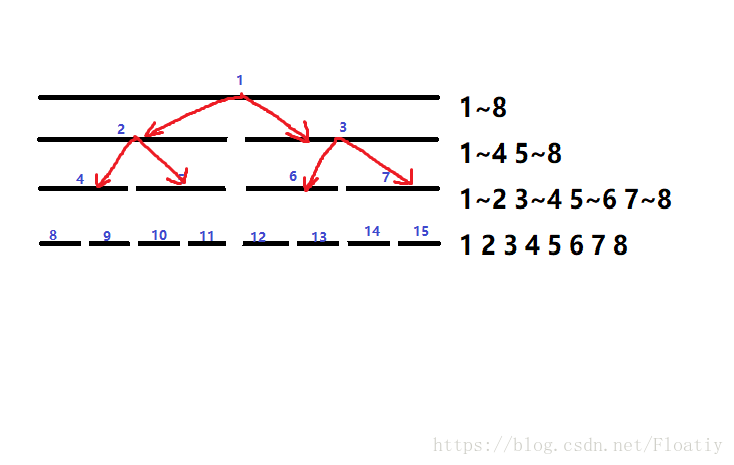
注意!这时我们发现3~4被2~5完全包含了!!
将3~4这段区间加上元素个数(右端点-左端点+1)× 要加的数v,不再二分它。
再注意!我们发现7~8已经完全不被2~5包含了!
对于完全离经叛道的区间,我们要及时return,不再二分它,不然整个算法的时间复杂度将退化成nlog
。
然后发现其它区间仍然不满足,接着二分其它的区间(1~2,5~6)
现在我们的区间经过层层二分已经变成单点了,我们把目前被包含的单点加上v;
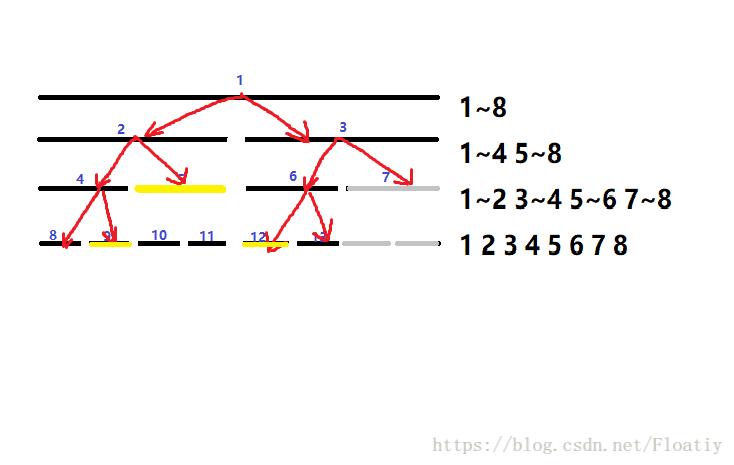
那我们的区间修改就完成了,总共只修改了图中亮黄色的3段区间。
我们得出结论:
线段树区间修改的时间复杂度为O(logn)!
这就是我们选择线段树的原因,至此我们已经完成了线段树区间修改的手动模拟。
下面我们来模拟一下建树的过程
我们也是从上到下不断二分,如果到达了最底层(也就是单点)就输入当前点的值。这个很好理解,就不模拟了。
然后是询问
其实询问和区间加法是一样的,都是从上而下进行二分,从线段树的顶端开始;
如果当前枚举到的区间被要加v的区间完全包含,就在把ans加上当前区间的值,不再往下枚举了。
如果不被完全包含,就接着二分,枚举当前这一段的前半段和后半段。
线段树怎么写?
啊我手把手教大家好了,这个确实是很难的东西。
emmm先写个结构体
#include<iostream> #include<cstdio> using namespace std; int n,m,ans; struct Tree{ int sum; int tag;//注意! }
这个tag,是线段树的精髓,也就是人们常说的“lazy标记”。
具体是什么呢?
记得我之前模拟的时候,“再记录一下这段区间被加过v,就不再往下枚举了”,这个tag就是用来记录这段区间被加过v(不是这段总共加v,是这段的每个单点加v),这样就避免了对这段区间之下的子区间进行枚举,从而使时间复杂度从nlogn降至了logn,而使得线段树优于朴素的修改。
tips:在代码中,pos表示当前处理的区段编号,L和R表示当前处理区段的左右端点,ll和rr表示要进行处理或询问的
接下来我们写build(建树)
void build(int L,int R,int pos) { if(L == R) { scanf("%d",&t[pos].sum); return; } int mid = (L + R)>>1; build(L,mid,pos<<1); build(mid + 1,R,pos<<1|1); update(pos); } void update(int pos) { t[pos].sum = t[pos<<1].sum + t[pos<<1|1]; return; }
说一下,pos是当前节点标号,也就是我图中的小蓝数字。
pos<<1和pos<<1|1是位运算,就是pos*2和pos*2+1,也就是pos的两个子区间,大家有兴趣的话可以对着我的图验证一下。
L R代表当前区间的左右节点,L==R时,说明此区间为单点,输入数据,然后结束就可以了。如果没到单点,就接着二分。
那这个update是干嘛的呢?
答:维护当前区间的父亲区间的值是正确的(正确意为:不需要加上tag的值就已经是事实上的sum)。
接下来我们写区间修改,这里以加法为例。
void add(int L,int R,int ll,int rr,int pos,int v) { if(ll <= L && R <= rr) { t[pos].sum += v * (R - L + 1); t[pos].tag += v; return; } if(R < ll || rr < L) return; pushdown(L,R,pos); int mid = (L + R) >> 1; add(L,mid,ll,rr,pos<<1,v); add(mid + 1,R,ll,rr,pos<<1|1,v); update(pos); } void pushdown() { if(!t[pos].tag) return; int mid = (L + R) >> 1; t[pos<<1].sum += t[pos].tag * (mid - L); t[pos<<1|1].sum += t[pos].tag * (R - (mid + 1) + 1); t[pos<<1].tag += t[pos].tag; t[pos<<1|1].tag += t[pos].tag; t[pos].tag = 0; }
所以又有了一个糟糕的东西叫 pushdown 。
什么东西呢?
它的用途跟update很像,其实就是update的反演。
记得我们之前处理的时候是怎么做的吗?
“再记录一下这段区间被加过v,就不再往下枚举了”
那万一我们需要处理它下面的区段怎么办呢?下面的区段不一定经过修改啊。
嗯这就需要我们的pushdown操作了,在每次修改时将lazy标记下放到下面的子区间,同时对子区间的值进行修改,保证在修改时这段区间的值是正确的。
加法已经模拟过了,不再赘述了。
区间查询的思路和区间修改差不多:
void query(int L,int R,int ll,int rr,int pos) { if(ll <= L && R <= rr) { ans += t[pos].sum; return; } if(R < ll || rr < L) return; pushdown(L,R,pos); int mid = (L + R) >> 1; query(L,mid,ll,rr,pos<<1); query(mid + 1,R,ll,rr,pos<<1|1) return; }
也是从上往下进行二分,思路和区间修改一样。
最后上完整代码:
#include<iostream> #include<cstdio> using namespace std; const int MAXN = 1e5 + 5; int n,m,ans; struct Tree{ int sum; int tag; }t[MAXN<<2];//空间需要开到nlogn void update(int pos) { t[pos].sum = t[pos<<1].sum + t[pos<<1|1].sum; } void build(int L,int R,int pos) { if(L == R) { scanf("%d",&t[pos].sum); return; } int mid = (L + R) >> 1; build(L,mid,pos<<1); build(mid + 1,R,pos<<1|1); update(pos); } void pushdown(int L,int R,int pos) { if(!t[pos].tag) return; int mid = (L + R) >> 1; t[pos<<1].sum += t[pos].tag * (mid - L); t[pos<<1|1].sum += t[pos].tag * (R - (mid + 1) + 1); t[pos<<1].tag += t[pos].tag; t[pos<<1|1].tag += t[pos].tag; t[pos].tag = 0; } void add(int L,int R,int ll,int rr,int pos,int v) { if(ll <= L && R <= rr) { t[pos].sum += v * (R - L + 1); t[pos].tag += v; return; } if(R < ll || rr < L) return; pushdown(L,R,pos); int mid = (L + R) >> 1; add(L,mid,ll,rr,pos<<1,v); add(mid + 1,R,ll,rr,pos<<1|1,v); update(pos); } void query(int L,int R,int ll,int rr,int pos) { if(ll <= L && R <= rr) { ans += t[pos].sum; return; } if(R < ll || rr < L) return; pushdown(L,R,pos); int mid = (L + R) >> 1; query(L,mid,ll,rr,pos<<1); query(mid + 1,R,ll,rr,pos<<1|1) return; } int main() { ___________________________ return 0; }