原理
对于求方程解问题,假设有函数 f :R->R,我们希望找到满足 f(θ)=0 的θ值. 这里θ是实数.
牛顿方法执行下面的更新
求解过程如图所示
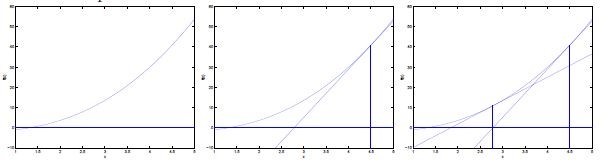
简单的来说就是通过求当前点的导数得到下一个点.用到的性质是导数值等于该点切线和横轴夹角的正切值
利用凸函数的性质,最值所在点 l'(θ)=0 令f(θ)=l'(θ)
牛顿方法的一般化:
如果θ是一个向量,那么:
H称为海森矩阵(Hessian matrix),是一个n*n的矩阵,n是特征量的个数,并且
牛顿方法的收敛速度比批处理梯度下降快很多,很少次的迭代就能够非常接近最小值了;但是当n很大时,每次迭代求海森矩阵和逆代价是很大的。
牛顿法是二阶收敛,梯度下降法是一阶收敛的,所以牛顿法看得更远,收敛更快。牛顿法的路径更符合最优路径。对于二阶凸函数能够一步到达。
实际中常常先用梯度下降法,在离得比较近时使用牛顿法;由于牛顿法需要每次更新海森矩阵,所以使用拟牛顿法。
举例
求解问题 f(x1,x2) = -x14 - 2x24 + 2x1x2 + 2x2 + 6
▽x1f =-4x13+2x2
▽x2f = 2x1-8x23+2
Hessian = [ -12x12, 2; 2, -24x22]
迭代次数计数
{
[x1 ; x2 ] = [x1 ; x2 ] -Hessian 点乘 [▽x1f ; ▽x2f ]}
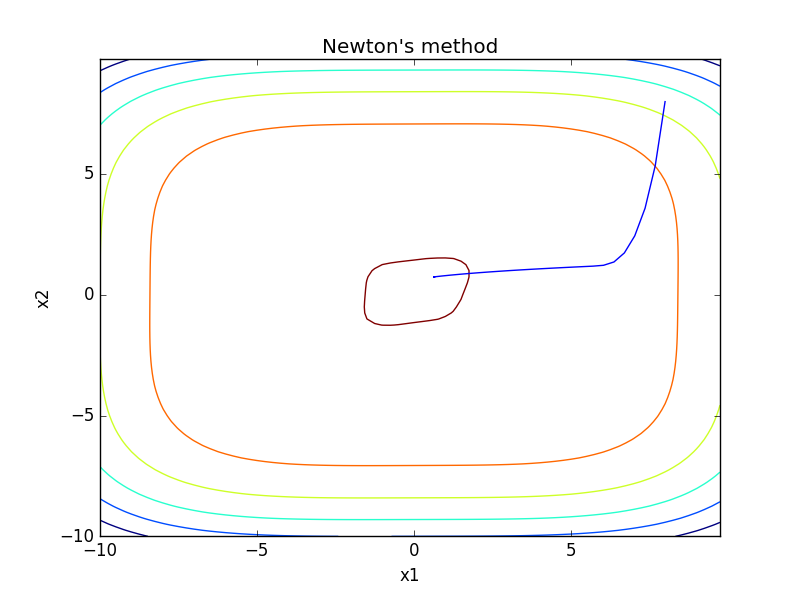
# -*- coding: utf-8 -*-"""Created on Wed Apr 12 23:56:25 2017@author: LoveDMR牛顿方法"""import numpy as npimport matplotlib.pyplot as pltdelta = 0.25x1 = np.arange( -10 , 10 , delta )x2 = np.arange( -10 , 10 , delta )X1 , X2 = np.meshgrid( x1 , x2 )Y = 2*X1*X2+2*X2-X1**4-2*X2**4 + 6plt.figure()bg_fig = plt.contour(X1,X2,Y)theta = np.array([8,8])a , b = [] , []a.append(theta[0])b.append(theta[1])H = np.array([[2,3],[3,10]])Hi = np.linalg.inv(H)for i in xrange(1,50):t = np.array([theta[0]**3*(-4)+2*theta[1]**2 , (-8)*theta[1]**3+2*theta[0]+2])H = np.array([[(-12)*theta[0]**3,2],[2,(-24)*theta[1]**2]])Hi = np.linalg.inv(H)theta = theta - np.dot( Hi ,t )a.append(theta[0])b.append(theta[1])plt.plot(a , b)plt.title( "Newton's method" )plt.xlabel('x1')plt.ylabel('x2')plt.show()