创建一个工作区(workspace)
工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件、编译文件和执行文件。建立工作区的方法如下:
- $ mkdir -p ~/catkin_ws/src
- $ cd ~/catkin_ws/src
- $ catkin_init_workspace
虽然这时候工作区是空的,但是我们依然可以进行编译:
- $ cd ~/catkin_ws/
- $ catkin_make
这时候,会在当前文件夹下生成devel,build这两个子文件夹,在devel文件夹下能看到几个setup.*sh文件。
接下来把工作区在bash中注册
- $ source devel/setup.bash
要验证是否已经在bash中注册可以使用如下命令:
- $ echo $ROS_PACKAGE_PATH
- /home/youruser/catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
如果能看到自己工作区的文件路径就说明已经成功了。
创建一个ROS工程包(Package)
在一个工作区内,可能会包含多个ROS工程包。而最基本ROS工程包中会包括CmakeLists.txt和Package.xml这两个文件,其中Package.xml中主要包含本项目信息和各种依赖(depends),而CmakeLists.txt中包含了如何编译和安装代码的信息。
首先切换到工作区:
- $ cd ~/catkin_ws/src
现在可以使用catkin_create_pkg命令去创建一个叫beginner_tutorials的包,这个包依靠std_msgs、roscpp、rospy。
- $ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
接下来在工作区编译这个工程包。
- $ cd ~/catkin_ws
- $ catkin_make
一个简单的发布(Publisher)、订阅(Subscriber)程序
写一个发布(Publisher)节点
节点(node)是连接到ROS网络中可执行的基本单元。我们在这创建一个发布者---“talker”节点,这个节点持续对外发布消息。
首先我们要把目录切换到我们的beginner_tutorials工程包中
- $ cd ~/catkin_ws/src/beginner_tutorials
因为我们已经编译过这个工程包了,所以会在beginner_tutorials文件夹下看到CmakeList.txt、package.xml文件和include、src这两个目录。接下来进入src子目录
- $ cd src
在src目录中创建一个talker.cpp文件,里面的内容如下:
- #include "ros/ros.h"
- #include "std_msgs/String.h"
- #include <sstream>
- int main(int argc, char **argv)
- {
- /**
- * The ros::init() function needs to see argc and argv so that it can perform
- * any ROS arguments and name remapping that were provided at the command line. For programmatic
- * remappings you can use a different version of init() which takes remappings
- * directly, but for most command-line programs, passing argc and argv is the easiest
- * way to do it. The third argument to init() is the name of the node.
- *
- * You must call one of the versions of ros::init() before using any other
- * part of the ROS system.
- */
- ros::init(argc, argv, "talker");
- /**
- * NodeHandle is the main access point to communications with the ROS system.
- * The first NodeHandle constructed will fully initialize this node, and the last
- * NodeHandle destructed will close down the node.
- */
- ros::NodeHandle n;
- /**
- * The advertise() function is how you tell ROS that you want to
- * publish on a given topic name. This invokes a call to the ROS
- * master node, which keeps a registry of who is publishing and who
- * is subscribing. After this advertise() call is made, the master
- * node will notify anyone who is trying to subscribe to this topic name,
- * and they will in turn negotiate a peer-to-peer connection with this
- * node. advertise() returns a Publisher object which allows you to
- * publish messages on that topic through a call to publish(). Once
- * all copies of the returned Publisher object are destroyed, the topic
- * will be automatically unadvertised.
- *
- * The second parameter to advertise() is the size of the message queue
- * used for publishing messages. If messages are published more quickly
- * than we can send them, the number here specifies how many messages to
- * buffer up before throwing some away.
- */
- ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
- ros::Rate loop_rate(10);
- /**
- * A count of how many messages we have sent. This is used to create
- * a unique string for each message.
- */
- int count = 0;
- while (ros::ok())
- {
- /**
- * This is a message object. You stuff it with data, and then publish it.
- */
- std_msgs::String msg;
- std::stringstream ss;
- ss << "hello world " << count;
- msg.data = ss.str();
- ROS_INFO("%s", msg.data.c_str());
- /**
- * The publish() function is how you send messages. The parameter
- * is the message object. The type of this object must agree with the type
- * given as a template parameter to the advertise<>() call, as was done
- * in the constructor above.
- */
- chatter_pub.publish(msg);
- ros::spinOnce();
- loop_rate.sleep();
- ++count;
- }
- return 0;
- }
写一个订阅(Subscriber)节点
还是在src目录下,创建一个listener.cpp文件。内容如下:
- #include "ros/ros.h"
- #include "std_msgs/String.h"
- /**
- * This tutorial demonstrates simple receipt of messages over the ROS system.
- */
- void chatterCallback(const std_msgs::String::ConstPtr& msg)
- {
- ROS_INFO("I heard: [%s]", msg->data.c_str());
- }
- int main(int argc, char **argv)
- {
- /**
- * The ros::init() function needs to see argc and argv so that it can perform
- * any ROS arguments and name remapping that were provided at the command line. For programmatic
- * remappings you can use a different version of init() which takes remappings
- * directly, but for most command-line programs, passing argc and argv is the easiest
- * way to do it. The third argument to init() is the name of the node.
- *
- * You must call one of the versions of ros::init() before using any other
- * part of the ROS system.
- */
- ros::init(argc, argv, "listener");
- /**
- * NodeHandle is the main access point to communications with the ROS system.
- * The first NodeHandle constructed will fully initialize this node, and the last
- * NodeHandle destructed will close down the node.
- */
- ros::NodeHandle n;
- /**
- * The subscribe() call is how you tell ROS that you want to receive messages
- * on a given topic. This invokes a call to the ROS
- * master node, which keeps a registry of who is publishing and who
- * is subscribing. Messages are passed to a callback function, here
- * called chatterCallback. subscribe() returns a Subscriber object that you
- * must hold on to until you want to unsubscribe. When all copies of the Subscriber
- * object go out of scope, this callback will automatically be unsubscribed from
- * this topic.
- *
- * The second parameter to the subscribe() function is the size of the message
- * queue. If messages are arriving faster than they are being processed, this
- * is the number of messages that will be buffered up before beginning to throw
- * away the oldest ones.
- */
- ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
- /**
- * ros::spin() will enter a loop, pumping callbacks. With this version, all
- * callbacks will be called from within this thread (the main one). ros::spin()
- * will exit when Ctrl-C is pressed, or the node is shutdown by the master.
- */
- ros::spin();
- return 0;
- }
编译创建的节点
在编译我们创建的节点之前,我们还需要编辑Cmakelist.txt文件(注意:是beginner_tutorials项目包下的CMakelist文件),告诉编辑器我们需要编辑什么文件,需要什么依赖。
- $ gedit CMakeLists.txt
在文件末尾添加如下语句:
- include_directories(include ${catkin_INCLUDE_DIRS})
- add_executable(talker src/talker.cpp)
- target_link_libraries(talker ${catkin_LIBRARIES})
- add_dependencies(talker beginner_tutorials_generate_messages_cpp)
- add_executable(listener src/listener.cpp)
- target_link_libraries(listener ${catkin_LIBRARIES})
- add_dependencies(listener beginner_tutorials_generate_messages_cpp)
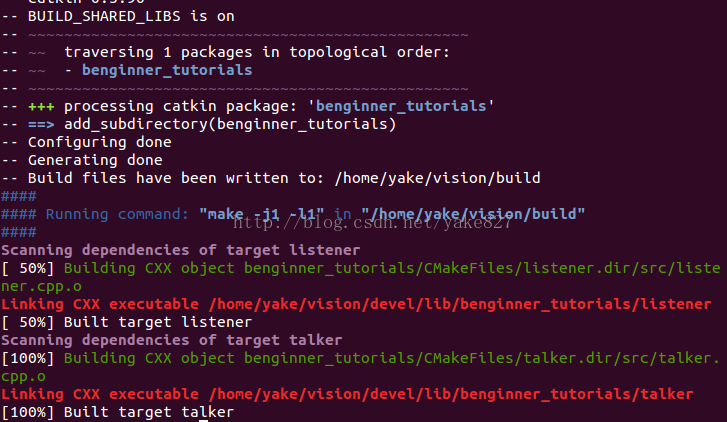
将目录切换到工作区目录,并执行catkin_make运行命令:
- $ cd ~/catkin_ws
- $ catkin_make
不出意外的话,会出现如下界面:
至此,程序已经创建完成,而接下来我们要检查一下我们创建的程序是否正确。
测试程序的正确性
- $ roscore
在使用我们的程序之前,需要先把程序注册
- $ cd ~/catkin_ws
- $ source ./devel/setup.bash
运行talker节点:
- $ rosrun beginner_tutorials talker
这时候会看到如下信息:
- [INFO] [WallTime: 1314931831.774057] hello world 1314931831.77
- [INFO] [WallTime: 1314931832.775497] hello world 1314931832.77
- [INFO] [WallTime: 1314931833.778937] hello world 1314931833.78
- [INFO] [WallTime: 1314931834.782059] hello world 1314931834.78
- [INFO] [WallTime: 1314931835.784853] hello world 1314931835.78
- [INFO] [WallTime: 1314931836.788106] hello world 1314931836.79
- $ rosrun beginner_tutorials listener
这时候会看到如下信息:
- [INFO] [WallTime: 1314931969.258941] /listener_17657_1314931968795I heard hello world 1314931969.26
- [INFO] [WallTime: 1314931970.262246] /listener_17657_1314931968795I heard hello world 1314931970.26
- [INFO] [WallTime: 1314931971.266348] /listener_17657_1314931968795I heard hello world 1314931971.26
- [INFO] [WallTime: 1314931972.270429] /listener_17657_1314931968795I heard hello world 1314931972.27
- [INFO] [WallTime: 1314931973.274382] /listener_17657_1314931968795I heard hello world 1314931973.27
- [INFO] [WallTime: 1314931974.277694] /listener_17657_1314931968795I heard hello world 1314931974.28
- [INFO] [WallTime: 1314931975.283708] /listener_17657_1314931968795I heard hello world 1314931975.28