最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/07/pid-when-should-i-compute-the-integral-term/
最近有一个建议张贴到初学者的PID系列。争议的焦点是,如果您解决拉普拉斯域中的问题,它指定了执行积分项的不同方式。评论人士建议,与其看某一点的误差总和,不如看最后一个点的总和。
因此,当前的代码是这样的:
1 /*Compute all the working error variables*/ 2 double input = *myInput; 3 double error = *mySetpoint - input; 4 ITerm+= (ki * error); 5 if(ITerm > outMax) ITerm= outMax; 6 else if(ITerm < outMin) ITerm= outMin; 7 double dInput = (input - lastInput); 8 9 /*Compute PID Output*/ 10 double output = kp * error + ITerm- kd * dInput;
建议是这样的:
1 /*Compute all the working error variables*/ 2 double input = *myInput; 3 double error = *mySetpoint - input; 4 5 double dInput = (input - lastInput); 6 7 /*Compute PID Output*/ 8 double output = kp * error + ITerm- kd * dInput; 9 10 ITerm+= (ki * error); 11 if(ITerm > outMax) ITerm= outMax; 12 else if(ITerm < outMin) ITerm= outMin;
我从未见过这样做,但我想我应该试一试。我设计的测试是一个简单的设定值阶跃,然后是一个斜坡下降。

当控制器设置为默认的采样时间时,差异是无法察觉的。为了突出这两种方法之间的差异,我决定将PID采样时间从默认值100mS提高到5秒。
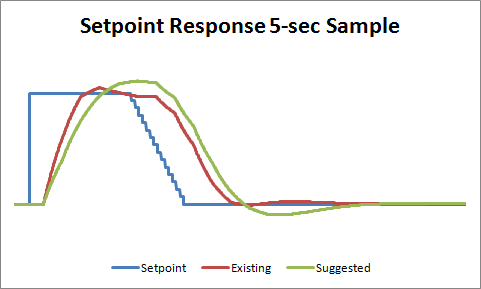
这里我们可以看到一个明显的赢家。现有的PID代码的性能比建议的要好,这可能是因为积分项对进程更改的响应要早5秒。但是为了确保我没有遗漏任何东西,我决定再做一次测试。我没有改变设定值,而是在系统中引入了负载变化。
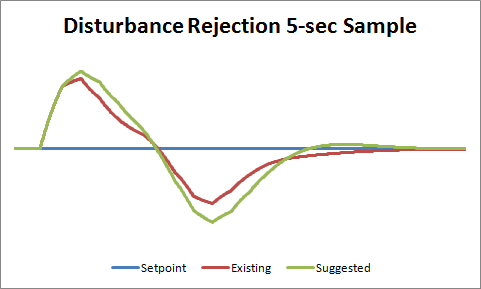
同样,现有的 PID 代码性能更好,处理负载变化更快。
那么判决呢?虽然这是一个有趣的锻炼,但我认为结果很清楚。我会保持原来的代码。
欢迎关注:
