在计算机控制系统中,由于系统特性和计算精度等问题,致使系统偏差总是存在,系统总是频繁动作不能稳定。为了解决这种情况,我们可以引入带死区的PID算法。
1、带死区PID的基本思想
带死区的PID控制算法就是检测偏差值,若是偏差值达到一定程度,就进行调节。若是偏差值较小,就认为没有偏差。用公式表示如下:
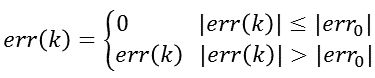
其中的死区值得选择需要根据具体对象认真考虑,因为该值太小就起不到作用,该值选取过大则可能造成大滞后。
带死区的PID算法,对无论位置型还是增量型的表达式没有影响,不过它是一个非线性系统。
除以上描述之外还有一个问题,在零点附近时,若偏差很小,进入死去后,偏差置0会造成积分消失,如是系统存在静差将不能消除,所以需要人为处理这一点。
2、算法实现
前面我们描述了带死区的PID控制的基本思想。在接下来我们来实现这一思想,同样是按位置型和增量型来分别实现。
(1)位置型PID算法实现
前面我们对微分项、积分项采用的不同的优化算法,他们都可以与死区一起作用于PID控制。这一节我们就来实现一个采用抗积分饱和、梯形积分、变积分算法以及不完全微分算法和死区控制的PID算法。首先依然是定义一个PID结构体。
1 /*定义结构体和公用体*/ 2 3 typedef struct 4 { 5 float setpoint; /*设定值*/ 6 float kp; /*比例系数*/ 7 float ki; /*积分系数*/ 8 float kd; /*微分系数*/ 9 float lasterror; /*前一拍偏差*/ 10 float preerror; /*前两拍偏差*/ 11 float deadband; /*死区*/ 12 float result; /*PID控制器计算结果*/ 13 float output; /*输出值0-100%*/ 14 float maximum; /*输出值上限*/ 15 float minimum; /*输出值下限*/ 16 float errorabsmax; /*偏差绝对值最大值*/ 17 float errorabsmin; /*偏差绝对值最小值*/ 18 float alpha; /*不完全微分系数*/ 19 float derivative; /*微分项*/ 20 float integralValue; /*积分累计量*/ 21 }CLASSICPID;
接下来我们实现带死区、抗积分饱和、梯形积分、变积分算法以及不完全微分算法的增量型PID控制器。
1 void PIDRegulator(CLASSICPID vPID,float pv) 2 { 3 float thisError; 4 float result; 5 float factor; 6 7 thisError=vPID->setpoint-pv; //得到偏差值 8 result=vPID->result; 9 10 if (fabs(thisError)>vPID->deadband) 11 { 12 vPID-> integralValue= vPID-> integralValue+ thisError; 13 14 //变积分系数获取 15 factor=VariableIntegralCoefficient(thisError,vPID->errorabsmax,vPID->errorabsmin); 16 17 //计算微分项增量带不完全微分 18 vPID-> derivative =kd*(1-vPID->alpha)* (thisError-vPID->lasterror +vPID->alpha*vPID-> derivative; 19 20 result=vPID->kp*thisError+vPID->ki*vPID-> integralValue +vPID-> derivative; 21 } 22 else 23 { 24 if((abs(vPID->setpoint-vPID->minimum)<vPID->deadband)&&(abs(pv-vPID->minimum)<vPID->deadband)) 25 { 26 result=vPID->minimum; 27 } 28 } 29 30 /*对输出限值,避免超调和积分饱和问题*/ 31 if(result>=vPID->maximum) 32 { 33 result=vPID->maximum; 34 } 35 36 if(result<=vPID->minimum) 37 { 38 result=vPID->minimum; 39 } 40 41 vPID->preerror=vPID->lasterror; //存放偏差用于下次运算 42 vPID->lasterror=thisError; 43 vPID->result=result; 44 45 vPID->output=((result-vPID->minimum)/(vPID->maximum-vPID->minimum))*100.0; 46 }
(2)增量型PID算法实现
在位置型PID中我们实现了比较全面的PID控制器,对于增量型PID我们也相应的实现这样一个控制器。除了这些结合外,其他的优化算法也可以结合使用,可以根据具体的需要来实现。首先依然是定义一个PID结构体。
1 /*定义结构体和公用体*/ 2 typedef struct 3 { 4 float setpoint; /*设定值*/ 5 float kp; /*比例系数*/ 6 float ki; /*积分系数*/ 7 float kd; /*微分系数*/ 8 float lasterror; /*前一拍偏差*/ 9 float preerror; /*前两拍偏差*/ 10 float deadband; /*死区*/ 11 float result; /*PID控制器计算结果*/ 12 float output; /*输出值0-100%*/ 13 float maximum; /*输出值上限*/ 14 float minimum; /*输出值下限*/ 15 float errorabsmax; /*偏差绝对值最大值*/ 16 float errorabsmin; /*偏差绝对值最小值*/ 17 float alpha; /*不完全微分系数*/ 18 float deltadiff; /*微分增量*/ 19 }CLASSICPID;
接下来我们实现带死区、抗积分饱和、梯形积分、变积分算法以及不完全微分算法的增量型PID控制器。
1 void PIDRegulator(CLASSICPID vPID,float pv) 2 { 3 float thisError; 4 float result; 5 float factor; 6 float increment; 7 float pError,dError,iError; 8 9 thisError=vPID->setpoint-pv; //得到偏差值 10 result=vPID->result; 11 12 if (fabs(thisError)>vPID->deadband) 13 { 14 pError=thisError-vPID->lasterror; 15 iError=(thisError+vPID->lasterror)/2.0; 16 dError=thisError-2*(vPID->lasterror)+vPID->preerror; 17 18 //变积分系数获取 19 factor=VariableIntegralCoefficient(thisError,vPID->errorabsmax,vPID->errorabsmin); 20 21 //计算微分项增量带不完全微分 22 vPID->deltadiff=kd*(1-vPID->alpha)*dError+vPID->alpha*vPID->deltadiff; 23 24 increment=vPID->kp*pError+vPID->ki*factor*iError+vPID->deltadiff; //增量计算 25 } 26 else 27 { 28 if((fabs(vPID->setpoint-vPID->minimum)<vPID->deadband)&&(fabs(pv-vPID->minimum)<vPID->deadband)) 29 { 30 result=vPID->minimum; 31 } 32 increment=0.0; 33 } 34 35 result=result+increment; 36 37 /*对输出限值,避免超调和积分饱和问题*/ 38 if(result>=vPID->maximum) 39 { 40 result=vPID->maximum; 41 } 42 43 if(result<=vPID->minimum) 44 { 45 result=vPID->minimum; 46 } 47 48 vPID->preerror=vPID->lasterror; //存放偏差用于下次运算 49 vPID->lasterror=thisError; 50 vPID->result=result; 51 52 vPID->output=((result-vPID->minimum)/(vPID->maximum-vPID->minimum))*100.0; 53 }
3、总结
引入死区的主要目的是消除稳定点附近的波动,由于测量值的测量精度和干扰的影响,实际系统中测量值不会真正稳定在某一个具体的值,而与设定值之间总会存在偏差,而这一偏差并不是系统真实控制过程的反应,所以引入死区就能较好的消除这一点。
当然,死区的大小对系统的影响是不同的。太小可能达不到预期的效果,而太大则可能对系统的正常变化造成严重滞后,需要根据具体的系统对象来设定。
欢迎关注:
