如果你考虑数据中的所有数据流一辆以最快时间尺度操作的自驾车。频率略低于Sensor Fusion的频率。
只比你有本地化和低您将在下一课中了解更多有关轨迹规划。接下来是您刚刚了解的预测。
然后在此图的顶部是具有最低更新率的行为计划。行为规划的输入来自于预测模块和本地化模块。
两者都从传感器融合中获得输入。行为模块的输出直接发送到轨迹规划器。这也需要预测和输入
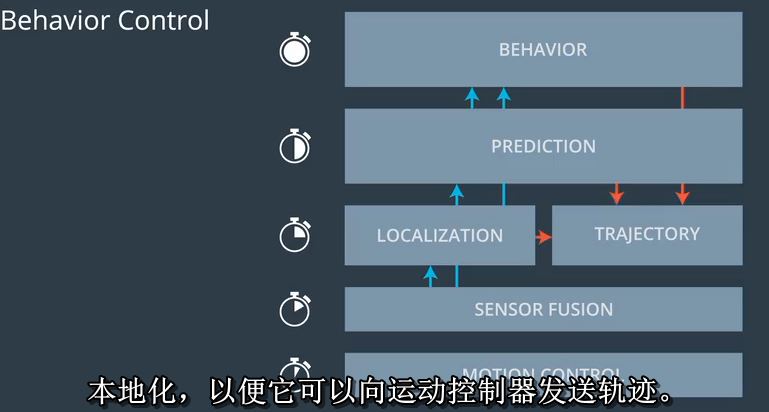
本地化,以便它可以向运动控制器发送轨迹。这个盒子里面的一切都是重点

在本课中,您将学习到具体的内容发生在这个相对较长的时间。但直观地说,这种长期的跨度来自于行为计划必须包含很多的事实
数据做出决定相当长的时间范围在10秒甚至更多。我们将从哪里开始做一个简短的介绍你将会更多地了解输入和输入的细节
输出给行为规划者并理解行为规划模块有望解决什么问题。
接下来,我们会谈谈有限状态机作为实现行为计划的一种技术。
接下来是更深入的了解,我们将使用成本函数来实际制定行为水平决策。
但首先让我们花一些时间看看输入我们将与我们合作,并产生我们的产出。