有很多类运动规划算法,今天我们将关注这些类中的一个,
但值得一提的是其他类。组合方法通常包括将空闲空间分成几部分
小件和第一次解决连接这些原子元素的运动计划问题。
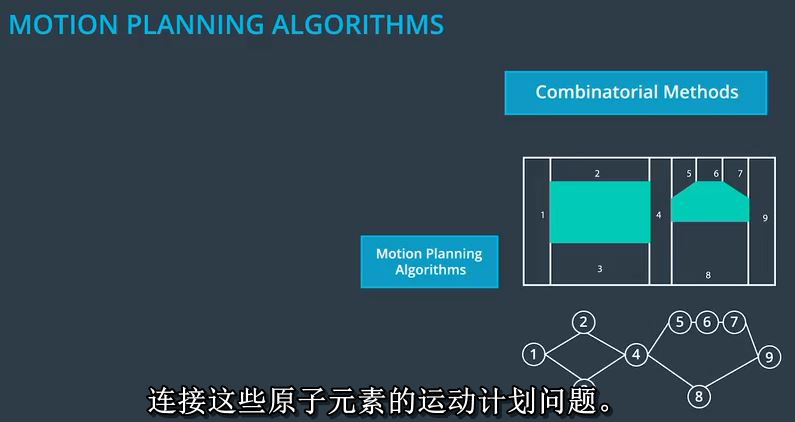
他们非常直观地找到最初的近似解决方案,但它们通常不适合大型环境。
接下来,潜在领域是反应方法。
每个障碍都将创造一种反重力场使车辆难以接近它。

例如,你可以想象使用这个想法围绕行人或者自行车鼓励你的计划算法找到远离它们的轨迹。
大多数潜在领域方法的主要问题是他们有时候将我们推入本地MIMA,这可能会阻止我们找到解决方案。
最优控制包括试图解决运动规划问题和控制拉生成算法。
使用车辆或起动配置和N配置的动态模型,我们想要生成一系列输入。
例如,转向角度和油门输入会导致我们从头到尾的配置优化相对于控制输入的成本函数等
尽可能减少气体消耗和相对于汽车的配置,例如与其他车辆保持距离。
有很多非常好的方法来做到这一点。其中大部分基于数值优化方法。
但是,很难包含所有与之相关的约束条件,其他车辆以足够好的方式使这些算法能够快速工作。
最后,还有基于抽样的方法,这是我们今天将重点关注的内容。

这些算法非常受欢迎,因为它们需要更容易计算空闲空间的定义。
基于采样的方法使用探测的碰撞检测模块可用空间来查看配置是否发生碰撞。
与组合或最佳控制方法不同,它分析整个环境,
为了找到解决方案,不需要探索自由空间的所有部分。
Explored部分存储在一个图形结构中
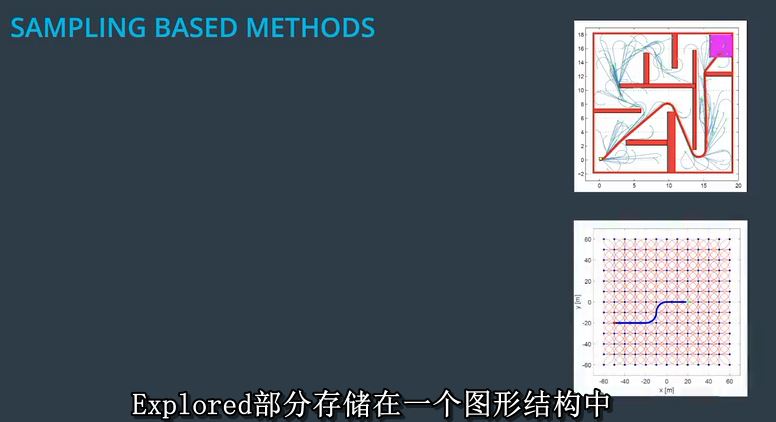
可以使用像Dijkstra或A star这样的图形搜索算法进行搜索。
两种主要的方法可以被识别为基于采样:离散方法,这依赖于有限的一组配置和/或输入,
就像叠加在我们配置空间顶部的网格一样,以及依靠的概率方法连续配置空间的概率样本。
可能的配置或状态的集合那将被探索的潜力是无限的,这给这些方法的一些好的属性

它们有时是完全概率的概率最优意义,他们会如果你允许他们足够的计算时间,总会找到解决方案。
我们几乎没有抓到表面存在的所有不同种类的计划算法。
远非我的想法来创建一个详尽的列表,我强烈建议你查阅一些
这些算法以及更多关于它们如何工作的信息。
接下来,我将介绍混合A星算法。
但在此之前,我建议你重新看一下你之前看到的视频
明星,然后回答一些关于它的一些属性的问题。