一、矩形碰撞
1. 使用rectangle的intersects判断碰撞
let rectA:egret.Rectangle = this.red.getBounds();
let rectB:egret.Rectangle = this.blue.getBounds();
//获得的rect不包含x,y位置
console.log(rectA); //x=0,y=0,width=200,height=200
console.log(rectB); //x=0,y=0,width=200,height=200
//必须加上方块所在的x,y
rectA.x += this.red.x;
rectA.y += this.red.y;
rectB.x += this.blue.x;
rectB.y += this.blue.y;
let startTime = egret.getTimer();
for(let i=0;i<1000;i++){
if(rectA.intersects(rectB)){
console.log("hit");
}else{
console.log("no hit");
}
}
console.log(egret.getTimer() - startTime); //检测1000次,耗时215ms
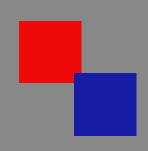
下图:no hit

下图:hit
矩形旋转后,还能正确判断碰撞吗?
下图:no hit

下图:no hit

下图:hit

矩形旋转后,并不能正确的判断碰撞了。查看源代码,可知并没有计算rotation这样的算法。
/**
* 确定在 toIntersect 参数中指定的对象是否与此 Rectangle 对象相交。此方法检查指定的 Rectangle
* 对象的 x、y、width 和 height 属性,以查看它是否与此 Rectangle 对象相交。
* @param toIntersect 要与此 Rectangle 对象比较的 Rectangle 对象。
* @returns 如果两个矩形相交,返回true,否则返回false
* @version Egret 2.4
* @platform Web,Native
* @language zh_CN
*/
public intersects(toIntersect:Rectangle):boolean {
return Math.max(this.x, toIntersect.x) <= Math.min(this.right, toIntersect.right)
&& Math.max(this.y, toIntersect.y) <= Math.min(this.bottom, toIntersect.bottom);
}
所以intersects的碰撞检测适用:
1. 用于矩形(未旋转)
2. eui对象(才有right、bottom属性)
3. 修改了锚点也能正常检测
2. 自定义的矩形碰撞检测
protected childrenCreated(){
let startTime = egret.getTimer();
for(let i=0;i<1000;i++){
if(this.checkRect(this.red, this.blue)){
console.log("hit");
}else{
console.log("no hit");
}
}
console.log(egret.getTimer() - startTime); //检测1000次,耗时220ms
}
/**
* 检测碰撞矩形
* @objA 对象A
* @objB 对象B
*/
public checkRect(objA: egret.DisplayObject,objB: egret.DisplayObject) {
var x1 = objA.x - objA.anchorOffsetX;
var y1 = objA.y - objA.anchorOffsetY;
var x2 = objB.x - objB.anchorOffsetX;
var y2 = objB.y - objB.anchorOffsetY;
if(y1 > (y2 - objA.height) && y1 < (y2 + objB.height)) {
if(x1 > (x2 - objA.width) && x1 < (x2 + objB.width)) {
return true;
}
}
return false;
}
适用范围:
1. 只要是矩形显示对象就可以,对比intersects不要求必须是eui对象
2. 对于旋转对象,同样没法碰撞检测
3. 对象修改了锚点也能正确检测
3. 旋转后的图形,也能正确碰撞。比如坦克大战中,坦克和墙等地形的碰撞检测方法

给坦克周围增加碰撞点

然后用hitTestPoint方法去检测碰撞点和矩形的碰撞。
这种方法,在主对象旋转后,依附于这个对象的红点的位置是会随着旋转变化的,这样可以判断旋转对象的碰撞了。
注意:使用hitTestPoint时,将红点的坐标使用localToGlobal或者其他方式转成和需要碰撞检测的物体同一坐标系。

物体objA,objA上有多个碰撞点,hitPointList就是碰撞点列表,上图中的坦克红点。
物体objB,需要检测的和坦克碰撞的矩形,rect是objB的矩形框
//碰撞检测
let rect = new egret.Rectangle(objB.x - objB.anchorOffsetX, objB.y -
objB.anchorOffsetY, objB.width, objB.height);
let hitPointList = objA.hitPointList;
let len = hitPointList.length;
let p:egret.Point = new egret.Point();
//遍历碰撞点和矩形碰撞
for(let i=0;i<len;i++){
p = objA.localToGlobal(hitPointList[i].x, hitPointList[i].y);
if(rect.containsPoint(p)){
console.log("hit");
break;
}
}
二、圆形碰撞
protected childrenCreated(){
let startTime = egret.getTimer();
for(let i=0;i<1000;i++){
if(this.checkCircle(this.red, this.blue, 100)){
console.log("hit");
}else{
console.log("no hit");
}
}
console.log(egret.getTimer() - startTime); //检测1000次,耗时250ms
}
/**
* 根据圆形的半径,检查圆形是否碰撞
* @ballA 圆形A
* @ballB 圆形B
* @radius 半径
* @return 是否碰撞
*/
public checkCircle(circleA:egret.DisplayObject, circleB:egret.DisplayObject, radius:number){
var pA:egret.Point = new egret.Point(circleA.x, circleA.y);
var pB:egret.Point = new egret.Point(circleB.x, circleB.y);
if(egret.Point.distance(pA, pB) <= radius*2){
return true;
}
return false;
}
下图:no hit
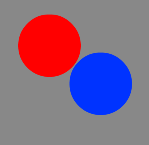
下图:hit

适用:
1. 圆形碰撞
2. 锚点需另行计算
3. 锚点在中心的话,旋转后也能正常碰撞检测。
三、点碰撞检测
protected childrenCreated(){
//不加这个,无法检测
this.validateNow();
let startTime = egret.getTimer();
for(let i=0;i<1000;i++){
if(this.red.hitTestPoint(this.blue.x, this.blue.y, false)){
console.log("hit");
}else{
console.log("no hit");
}
}
console.log(egret.getTimer() - startTime); //检测1000次,耗时260ms
}
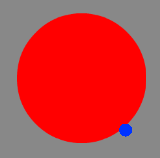
因为hitTestPoint第三个参数false,所以不是检测像素,而是检测边框碰撞。所以蓝点没碰到圆,但是在圆的矩形框内,也算是hit。
下图:hit

下图:蓝色点在红色圆的矩形框范围内
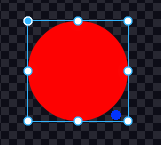
hitTestPoint第三个参数为true,检测像素。非常耗时。检测1000次,耗时2100ms。
下图:no hit

下图:hit 检测1000次,耗时4000ms