机械臂运动规划
在邱强博士的研究中,机械臂运动规划,等同于路径规划,但是在无人车领域,是不同的。
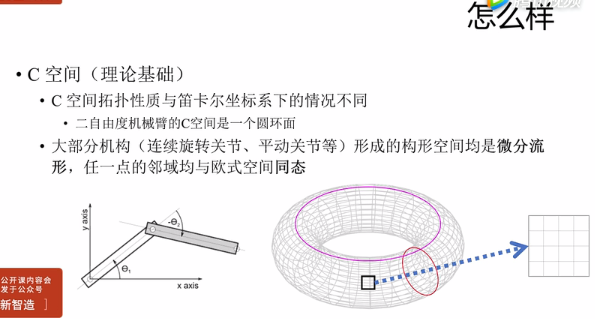
- C空间
构型空间,Configuration Space
用向量描述机器人的构型
- 在机械臂运动规划领域,各个算法的应用:
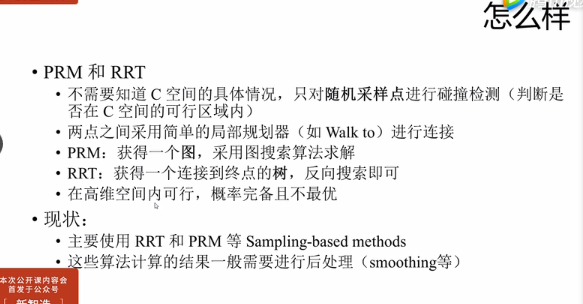
在机械臂领域,主要还是用PRM和RRT算法。
- 神经网络和强化学习
- 深度强化学习
- CNN强大的环境理解能力
- 强化学习可以进行路径规划
无人车运动规划
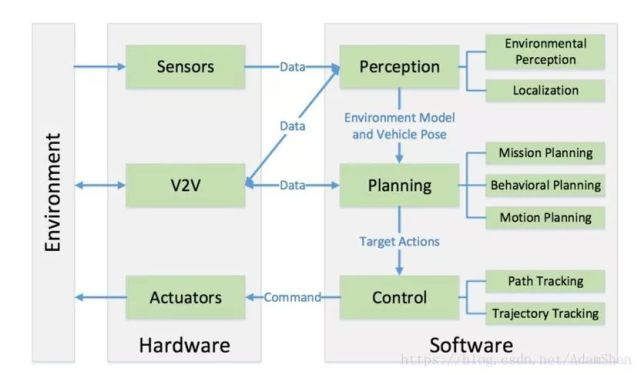
无人驾驶系统的核心是感知、规划、控制。其中规划分为任务规划、行为规划、动作规划三部分。无人驾驶规划系统的分层结构设计源于美国2007年举办的DAPRA城市挑战赛。也就是说,机器人的motion planning并不是按照这种划分的,所以机器人机械臂的motion planning与路径规划没有严格区分。下图为无人驾驶系统。
-
任务规划
任务规划通常也被称为路径规划或者路由规划(Route Planning),其对应着相对顶层、全局的路径规划,比如起点到终点的路径选择。传统的算法如Dijkstra算法、A*算法D*算法,被主要应用于计算离散图的最优路径搜索。
-
行为规划
也称为决策制定(Decision Maker),根据任务规划的目标对当前环境的感知,作出下一步无人车需要执行的决策和动作,可以理解为决策系统。行为规划实现的一种方法是使用包含大量动作短语的复杂有限状态机(FSM)。
-
动作规划
通过规划一系列的执行动作以达到某种目的(如避障)的处理过程。计算效率和完整性是衡量动作规划算法的两个指标。
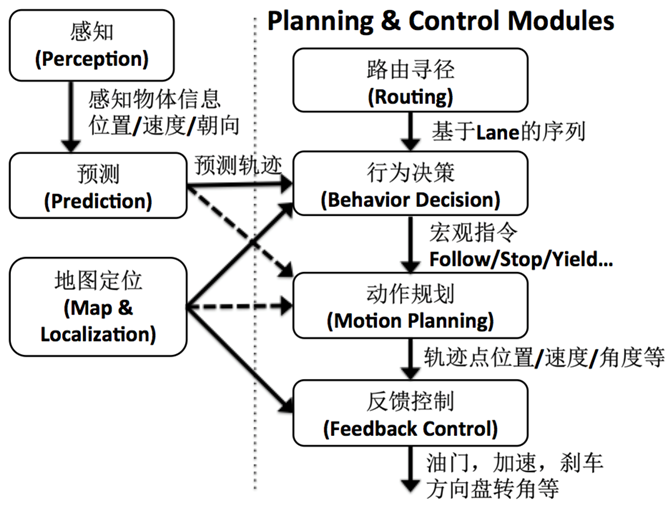
有很多不同的分类,运动规划包含路径规划和轨迹规划,比如下图的分类:
对于智能车辆而言,全局路径点只要包含空间位置信息即可,也可以包含姿态信息,而不需要与时间相关,但局部规划时,则可以考虑时间信息。这里规定轨迹点也是一种路径点,即当路径点信息中加入时间约束,就可以被称为轨迹点。从这个角度理解,轨迹规划就是一种路径规划,当路径规划过程要满足无人车辆的纵向和横向动力学约束时,就成为轨迹规划。