论文《Suboptimal Variants of the Conflict-Based Search Algorithm for the Multi-Agent Pathfinding Problem》
文章作者relax了上层或下层的搜索,分别提出了:
- Greedy-CBS :快速找到解,越快越好(不保证质量)
- Bounded-CBS:focal-list in 上下层
- Enhanced-CBS:有界的次优
1.Bounded Suboptimal Solvers
通过参数来衡量次有的界限(在求解时间和质量之间权衡):

求得次优解的cost :

理论最优解:

2.Greedy-CBS (GCBS): Suboptimal CBS:
为了保证最优性,CBS的上层和下层都是一个best-first search。
GCBS允许一个更flexible search in 上层和下层,使得搜索时扩展的节点能够快速的得到解(那就是放大Heuristic吗?)。
2.1 Relaxing 上层
核心思想:对CT节点排序,使得它们更接近目标节点。
我们提出了一些conflict heuristics(hc),使得less conflict的CT nodes能够更可能到达终点node。
我们尝试了下边几种启发值:
- h1:冲突个数
- h2:至少有一个冲突的agent的个数
- h3:至少有一个冲突的agent对数
- h4:Vertex cover 定义了一个graph,agents是nodes,如果agents之间存在conflict,则存在一个edge。实际上,h2识别出nodes,h3识别出graph的edge.
- h5:Alternating heuristic 当存在多种heuristics时,在一个“round robin fashion”,交替使用不同的heuristics可以得到更好的效果。这个方法就是著名的“Alternating Search”,需要几个heuristic函数并且维护一个unique open list for each,使得很难写代码。
经过实验:
- h5的performance最好;
- h4的解质量最高,但是需要更大的计算量;
- h2在某些问题中计算很快,但是在某些问题又计算很慢(这个在我尝试时,也出现过这个现象)
- h1计算的比h3稍微快一些,但是h3在不同的例子中,鲁棒性更高。
我们选择h3作为hc,因为h3在是权衡简单性和性能最好的。
注意,这些启发值都不是admissible的,所以它们的解自然不是最优,也不是bounded solution。
2.2 Relaxing 下层
relax CBS的另一个方法就是下层采用一个次优化求解器,比如weighted A*和greedy-BFS。
虽然可以快速得到解,但是得到的路径更长,包含了未来的很多冲突,这会导致上层的效率降低。
所以我们在下层,依然采用conflict heuristics。在CBS中,下层搜索返回的是满足当前agent的冲突的最短路径,
这里修改为,返回的是,返回的路径不仅仅是满足当前约束的最短路径,而是跟其他agent冲突最少的更优先。(路径短和冲突少的权衡)
这样,下层返回了一条跟其他agent之间冲突最少的路径。(也就是不管路径最短了吧)
2.3 GCBS的完备性
完备的
2.4 实验
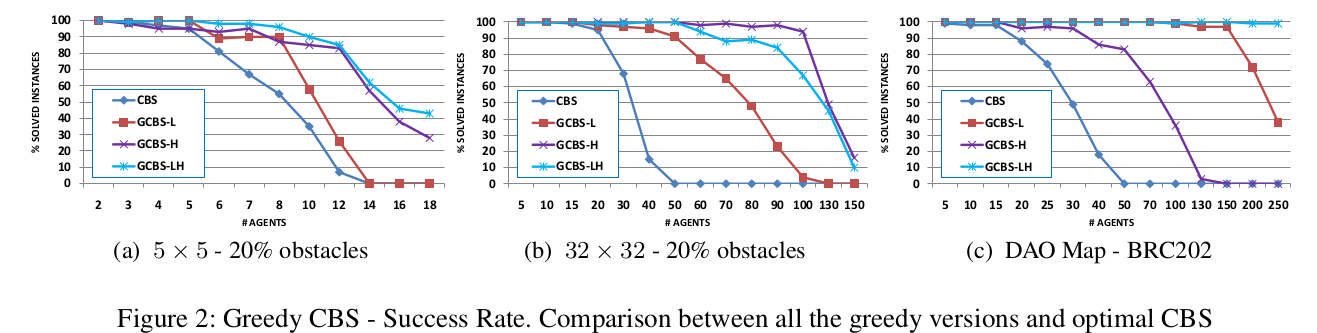
1. GCBS-H which uses h c for choosing CT nodes at the high level but the low level runs ordinary A*.
2. GCBS-L which, similar to the original CBS, uses the g-values for choosing CT nodes at the high level but the low level uses h c for its expansions.
3. GCBS-HL which uses h c for both levels.
在5x5的栅格地图上,非常稠密,冲突非常多,下层无法对单车找到一个无冲突路径,这个时候,上层的性能就至关重要啦,需要将搜索引导至冲突少的地方,
这个时候,CBS效果最差,GCBS-HL效果最好。
在32x32的栅格地图上,地图非常大,即使冲突很多,但是分布在时间和空间中,因此下层搜索压力并不大。这个时候,GCBS-HL就不如CCBS-H了,因为它的下层为了避免冲突,返回了很长的路径,这导致在远处的约束可能导致上层的冲突。反而是GCBS-H性能最好。当然,CBS依然是最差的。
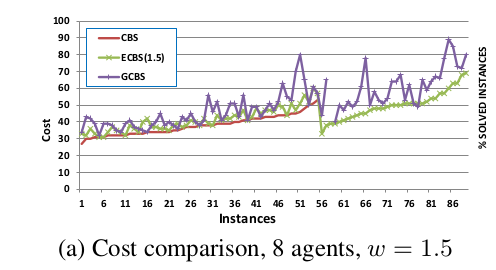
对比cost,感觉这个次优性是可以接受的呀,与最优cost,差别并不大,多数在5%内。

总的来说,GCBS-HL性能好于GCBS-H和GCBS-L,推荐作为一般使用。
3.Bounded Suboptimal CBS
常用的bounded-suboptimal search是Weighted A*。但是CBS上层没有启发值,所以这里不能采用WA*,而是采用Focal search。
3.1 FOCAL search
维护OPEN-list和FOCAL-list。FOCAL-list是OPEN-list的子集。
函数f1,用于从OPEN-list中筛选一些节点放入FOCAL-list中。f1min是f1的最小值 in OPEN-list
给定次优系数w,将OPEN-list中满足下式的节点都添加到FOCAL-list中:
![]()
函数f2,用于从FOCAL-list中选出节点来扩展。
3.2 BCBS
上层和下层均采用focal search,focal-search(f1, f2)
上层:
采用focal-search(g, hc)。将CT树中节点cost < w*g的节点都加入到focal-list中,然后在根据hc对focal-list中的节点排序,选出冲突启发值最小的(这里用的是h3??)
下层:
采用focal-search(f, hc)。
 分别表示上层和下层的次优系数
分别表示上层和下层的次优系数

 分别表示只在上层次优化,和只在下层次优化。
分别表示只在上层次优化,和只在下层次优化。
 就变成了
就变成了 ,此时FCOAL和OPEN是相同的。
,此时FCOAL和OPEN是相同的。
4.Enhanced CBS
4.1

在BCBS中,上层和下层的次优系数是固定的,但是这个可能导致低效率。为了解决这个问题,我们提出了ECBS。
ECBS的下层:
跟BCBS(1, w)的下层相同。
ECBS的上层:
对于上层节点n,定义一个LB(n):

其中i表示第i个agent,
fmin(i) 表示,第i个agent,其下层OPEN-list中(不是FOCAL-list),最小的值,下层的次优系数w。
![]()
![]()
每产生一个CT node,下层返回两个值给上层:
1.n.cost
2.LB(n)
n.cost与LB(n)有啥区别?
 ,
,  代表上层的openlist。
代表上层的openlist。
上层的FOCAL list:

相比于BCBS,ECBS在保持下层相同的情况下,都提供了w的自由度,在上层也提供了额外的灵活性。
4.2 实验
对比了5个设置:




(5)CBS作为baseline,相当于BCBS(1, 1)
对比结果:
1.ECBS由于其他
2.对于BCBS之间, BCBS(w, 1)在5x5和32x32栅格地图上,表现的最好;而BCBS(1, w)在DAO地图上表现的最好。
还是那个结论,在稠密和小的地图中,适合给上层设置w。
3.GCBS经常返回比较低的cost,虽然在理论上GCBS是unbounded。 GCBS通常返回接近最优解的cost,但是方差比bounded solver大;
5.如何选择求解器:
对于设计者,如果主要目的是时间,而偶尔的高cost可以接受,那么GCBS作为选择,因为它通常比ECBS快。
如果stability,reliability,bounded是重要的,那ECBS更合适。