卡尔曼滤波技术
滤波
组合导航实质上是多传感器信息融合。通过对各导航子系统的输出的有效处理,应用信息融合的理论与技术,完成状态估计并获取最终的导航参数。
状态估计:
对目标过去的运动状态进行平滑;
对目标现在的运动状态进行滤波;
对目标未来的运动状态进行预测。
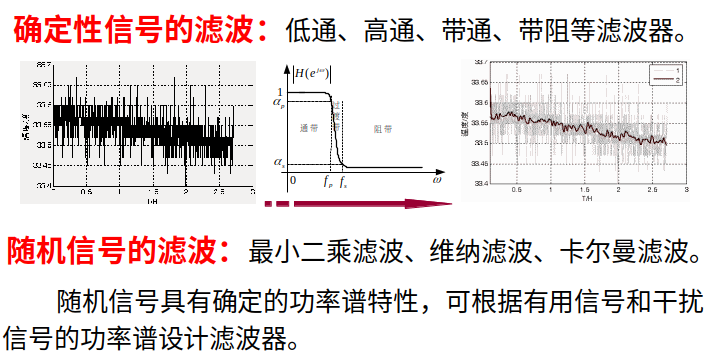
滤 波:从混合在一起的诸多信号中提取出所需信号的过程。
卡尔曼滤波
卡尔曼滤波算法是一种线性最小方差估计的递推算法,相对其它几种随机信号滤波方法,卡尔曼滤波具有如下特点:
算法是递推的,且在时域内设计滤波器;
采用动力学方程描述被估计量的动态变化规律;
卡尔曼滤波具有连续型和离散型两类算法。
应 用:阿波罗登月、C-5A飞机导航系统。
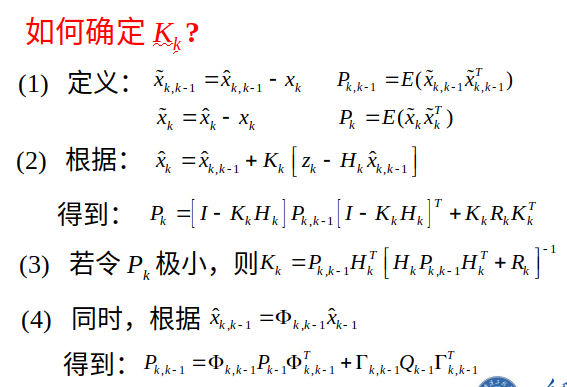
卡尔曼滤波估计原理


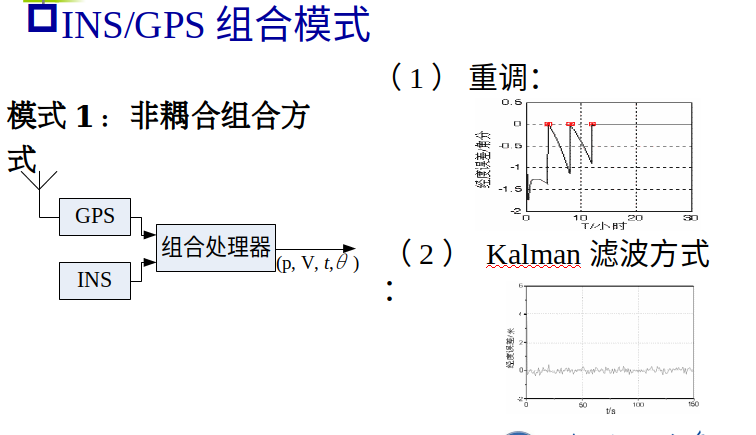
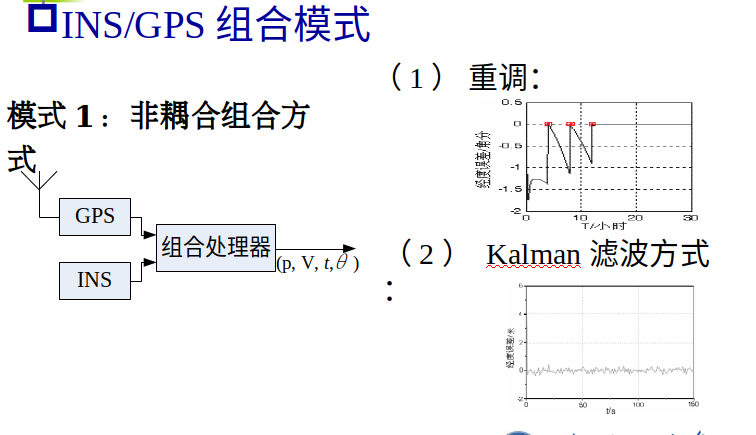
INS/GPS组合技术
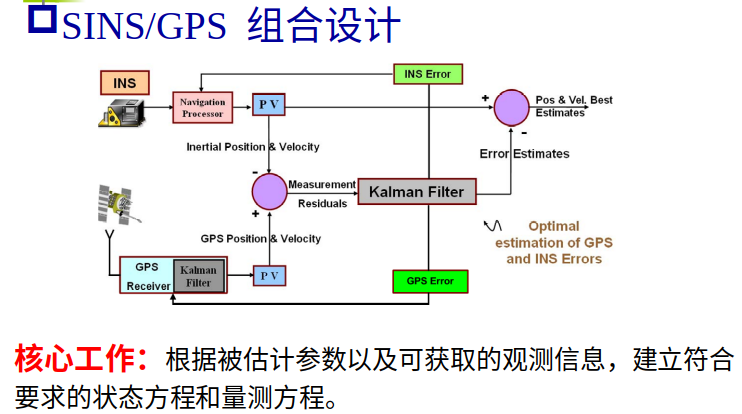
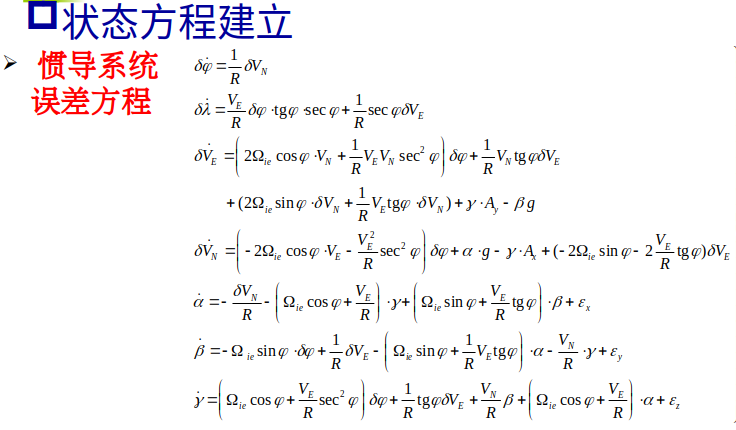
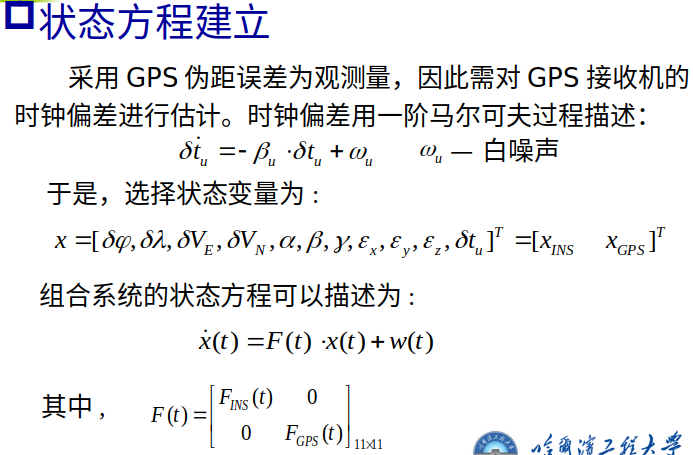
状态方程建立
在船用惯性导航系统的使用中,通过对常值陀螺漂移的补偿,消除了常值陀螺漂移造成的系统位置、速度和姿态误差,但随机漂移的影响依然存在。惯导和GPS组合滤波,在对系统输出作最优估计的同时,还可对随机的漂移进行估计和补偿,从而提高惯导系统本身的精度。
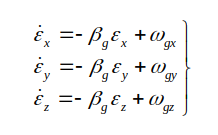
考虑陀螺随机漂移时,用一阶马尔可夫过程对其状态进行描述:
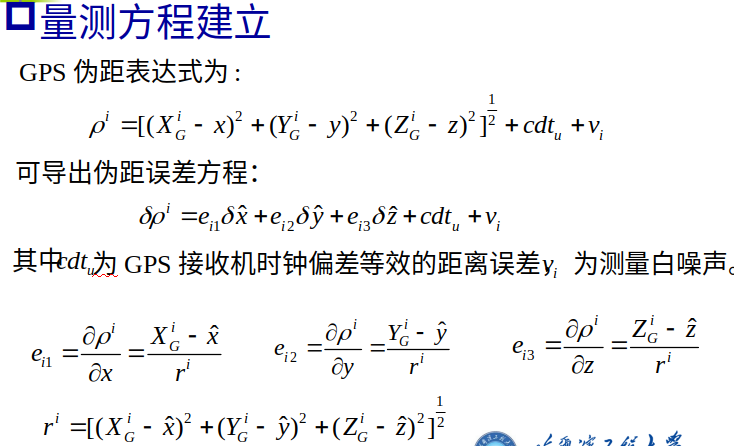
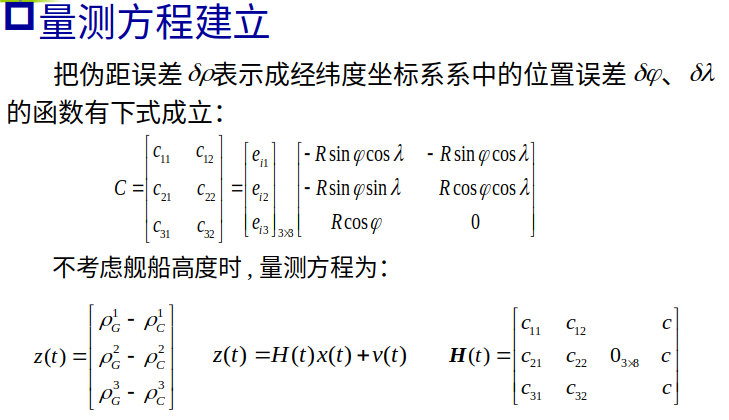
量测方程建立
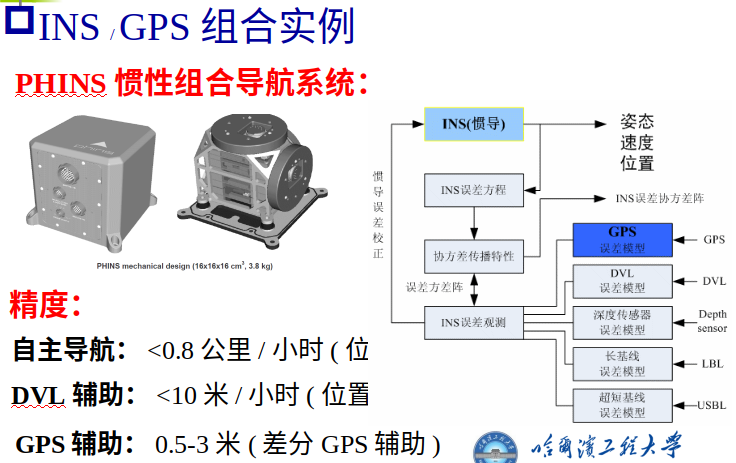
INS/GPS组合实例
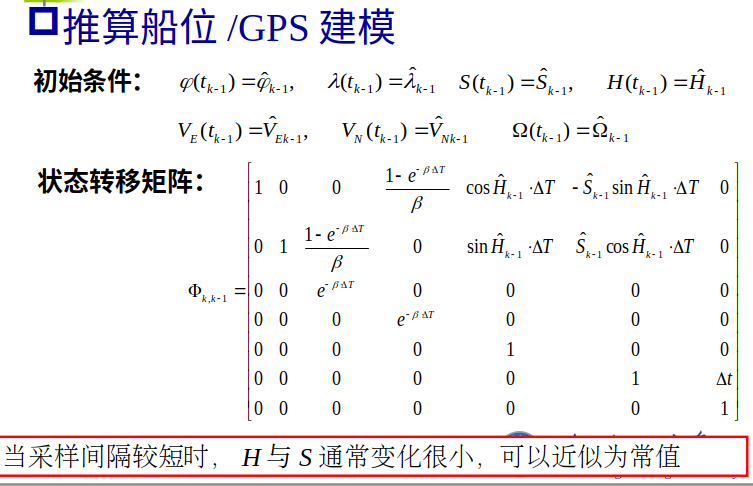
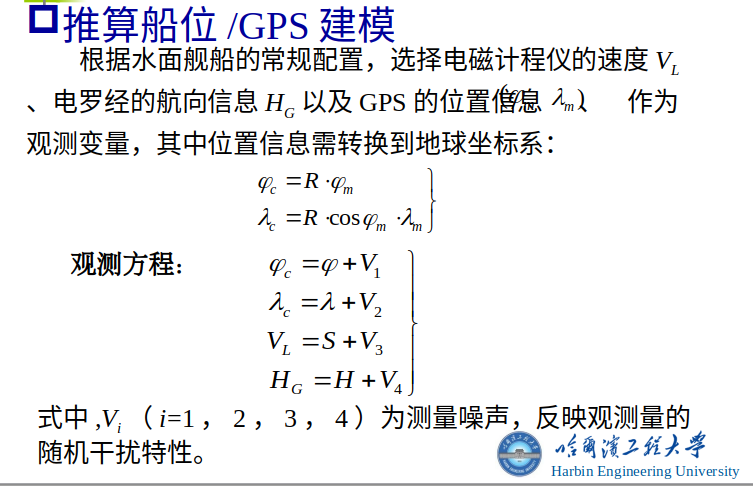
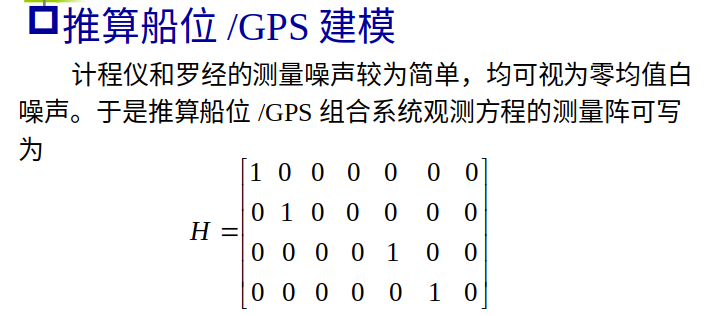
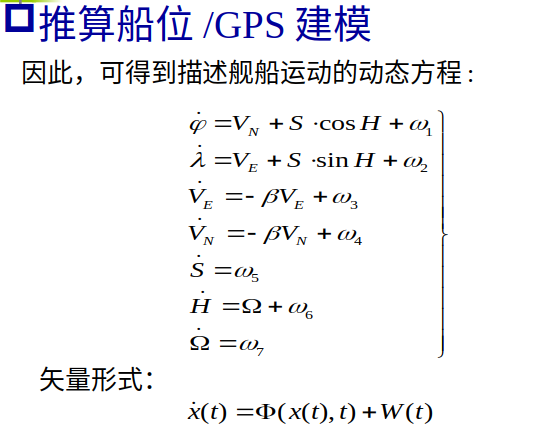
推算船位/GPS组合技术
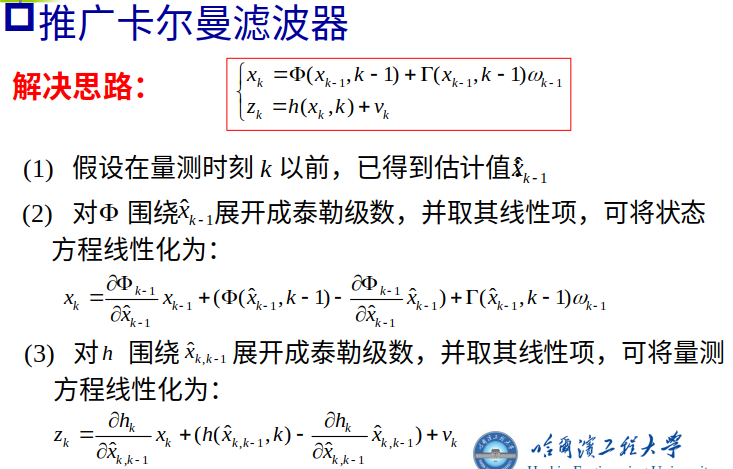
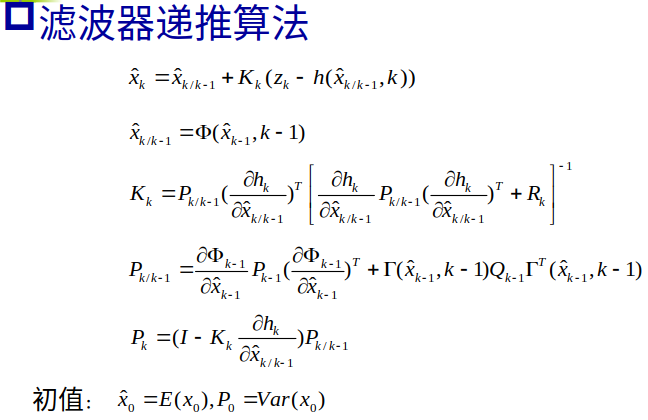
推广卡尔曼滤波器
推算船位和GPS构成的组合系统,由于其状态方程不再是线性的,因而必须采用推广的卡尔曼滤波器处理。
推广的卡尔曼滤波器是通过对现时状态估计进行线性化的方法,解决非线性系统的滤波问题。由于它与普通卡尔曼滤波器的相似性,一般把推广的卡尔曼滤波器作为对任意非线性滤波问题首先试用的方法之一。