导航定位仿真
仿真配置
stage_ros:仿真平台
amcl:用于定位
move_base:导航的实现
map_server:提供地图
配置文件有如下:

首先看一下stage_config目录,该目录下有maps以及worlds目录
在maps目录下有

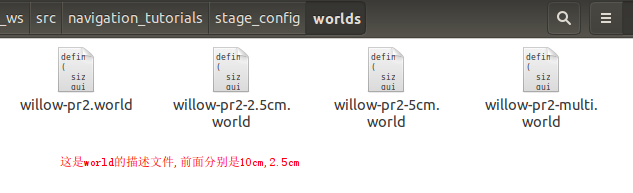
在使用map文件和world文件的分辨率需要对应否则会出错.
在launch文件夹里面有文件
move_base_amcl.launch以及move_base_gmapping.launch
进入move_base_config文件夹

amcl_node.xml这是amcl的配置文件
base_local_planner_params.yaml:这是局部规划器
costmap_common_params.yaml:
global_costmap_params.yaml
local_costmap_params.yaml
move_base.xml
slam_gmapping.xml:
再进入到rviz目录下

首先讲解move_base_config/amcl_node.xml









编译之,catkin_make
先运行roslaunch navigation_tutorials move_base_amcl.launch
下面看一下都有那些主题

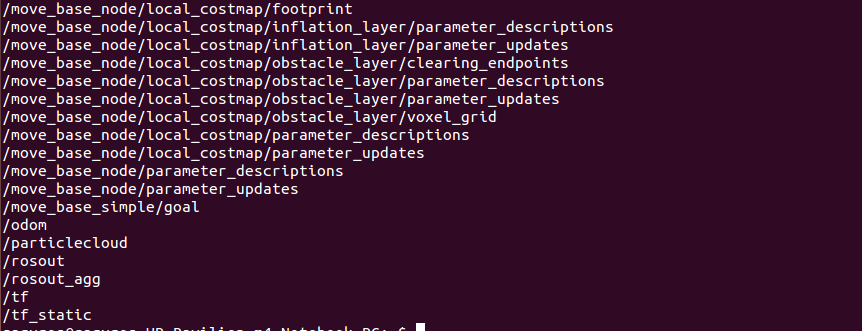
具体看一下下面一些主题
rostopic info /move_base_simple/goal

下面看一下这个主题上发送的消息是怎样的
rostopic echo /move_base_simple/goal

下面看一下/cmd_vel主题的相关参数

看下它的具体数据

再来看一下rostopic info /initialpose
它是rviz中的2D位姿估计


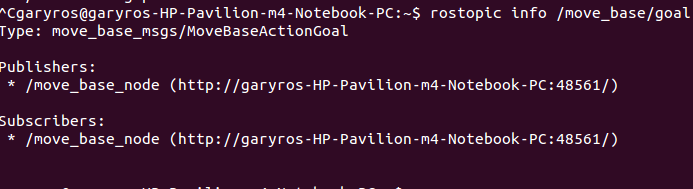
以/move_base/goal为例看一下


下面看一下/move_base_node/TrajectoryPlannerROS/local_plan

要多去分析rviz中的主题相关的信息,结合命令行工具!!!!!
下面来看一下gmapping
roslaunch navigation_tutorials move_base_gmapping.launch