使用URDF创建机器人3D仿真模型
在真实的机器人上编程可以更好地让我们理解机器人的控制方式,因为真实的机器人会有反馈.如果没有真实的机器人,那么ROS仿真是一个很好的选择.
ROS通过URDF(Unified Robot Description Format)描述机器人硬件尺寸布局.
1.创建一个Ros包
catkin_create_pkg smart_car std_msgs rospy roscpp urdf
catkin_create_pkg最后一个参数是引入urdf 库
cd smart_car
mkdir urdf
2.创建一个launch文件
在包目录下创建一个launch文件夹,并新建文件display.launch,如下所示

第一个输入参数 model 就是要启动的urdf文件路径。
第二个输入参数 gui 指定是否启用关节转动控制面板窗口。
该文件可以帮助启动RViz来观察机器人。其中有三个node,一个是rviz,另外两个joint_state_publisher robot_state_publisher是必须的node。
3.创建基座base_link
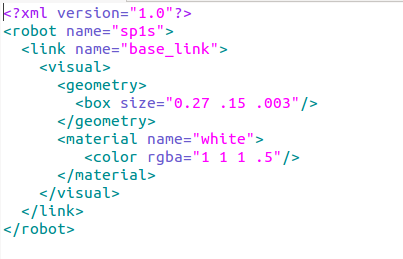
ROS里面把每个零件称为link,作为基座的link统一称为base_link.其他的link都要依附到base_link上.这里把下层的板作为base_link.新建一个urdf文件,名为sp1s.urdf,其代码如下:
link可以指定许多属性:
<inertial> 定义惯性
<visual> 定义一个link的外观,大小,颜色和材质纹理贴图
<collision>定义碰撞检测属性
我们详细看一下<visual>的定义:
<geometry> 定义了几何形状为一个立方体,三个参数分别为长宽高,单位是米(m). 这里我们指定下层小车板子的板的尺寸。
<geometry>可以有好几个选项:<box> 立方体 <cylinder>圆柱体 <sphere>球体 <material> 指定颜色rgb和透明度a. 它们取值范围都是[0,1] 区间。
4.运行下面命令
roslaunch smart_car display.launch gui:=true
出现如下的显示界面

这时只是显示了一个半透明的长方体,就是我们的主体部分。中间的黄色点代表了base_link的原点,也是整个RViz世界的原点。
5.下面创建轮子
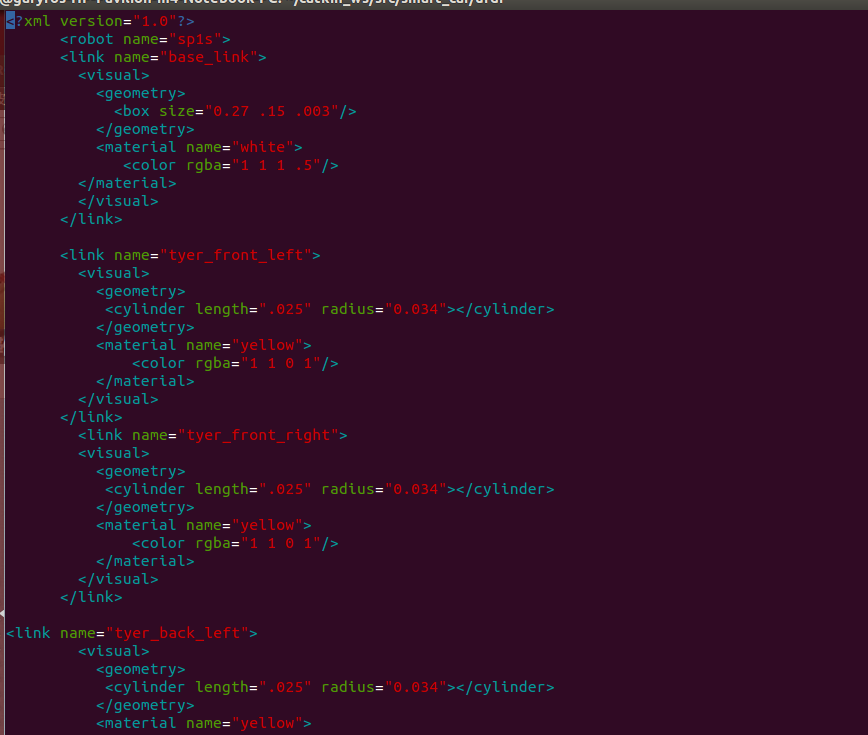
创建四个轮子,名字分别是tyer_front_left,tyer_front_right,tyer_back_left,tyer_back_right,尺寸大小直径为6.8cm,厚度为2.5cm,下面先以一个轮子为例:

定义黄色的轮子tyer_front_left
添加了一个关节 joint将base_link和tyer_front_left关联在一起,为了简单,将joint定义为fixed类型。
两个及以上的link定义到一个文件里必须使用joint关联,否则出错.
6.运行下面命令
roslaunch smart_car display.launch gui:=true

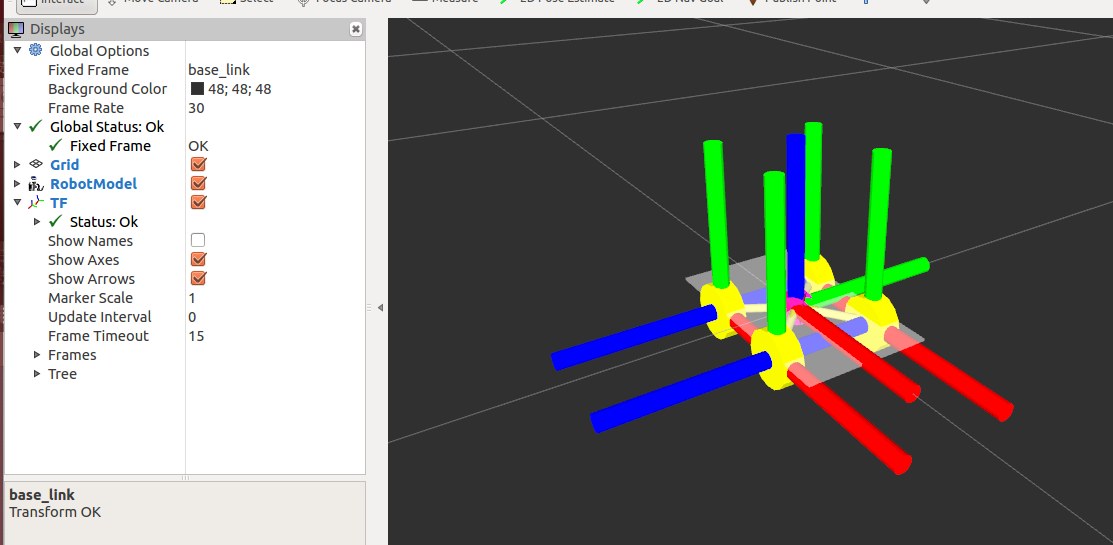
可以看到黄色的轮子显示到了车身的中央,因为它的原点origin和base_link的origin重合. 选中TFcheckbox,就会显示出XYZ坐标轴,红色为X, 绿色为Y,蓝色为Z。
7.下面将讲述如何使用joint将轮子平移到左上方并旋转。
1)建立可以转动的joint

1. 将joint的类型改为"continuous" 这样front_left相对base_link就是一个转动的装置
2. 转动的位置就是由 origin定义的,它同时定义了tyer_front_left的新原点,之前它的原点默认就是base_link的原点
xyz 是相对parent base_link原点的偏移, 它把轮子移动到了左前方。其中:
z = -0.011m = 6.8cm/2-4.5cm,保证轮子是在地上的
y = 0.064m = 15cm/2 - 2.5cm / 2 (轮子厚度) + offset
pry 是分别以 x y z 轴为中心转动的角度(弧度制) 1.57075 就是90度。 围绕x轴旋转90度轮子就竖了起来。
3. axis重新定义转动轴在原点的方向,它是一个矢量,只指示方向,它们必须满足 x * x + y * y + z * z = 1 原点Z轴已经被旋转90度变成水平方向,所以这里定义Z轴方向为转动方向
2)运行命令
roslaunch smart_car display.launch gui:=true

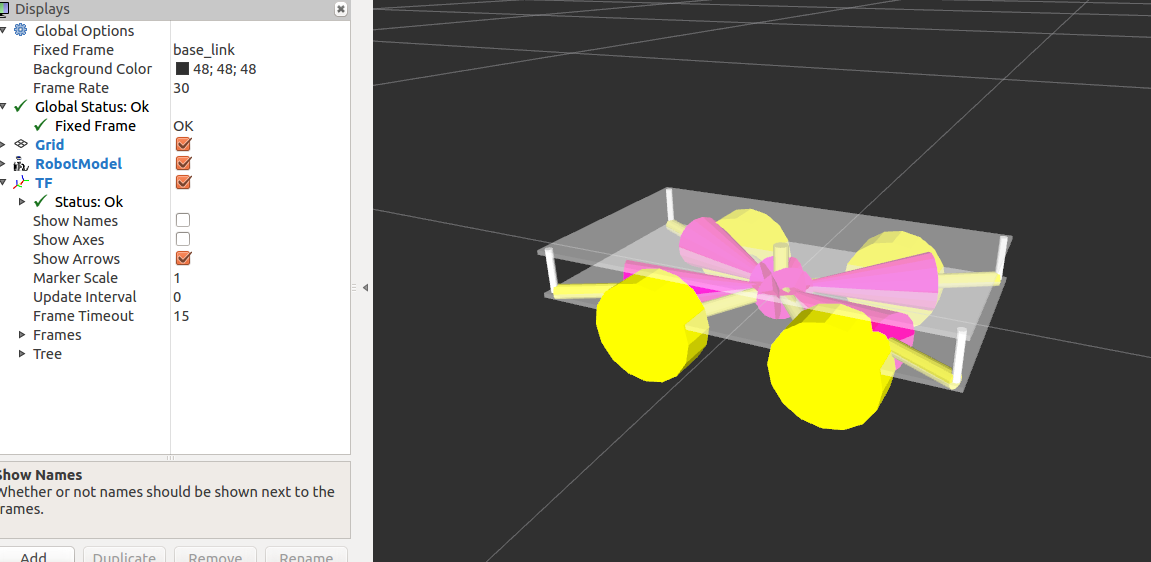
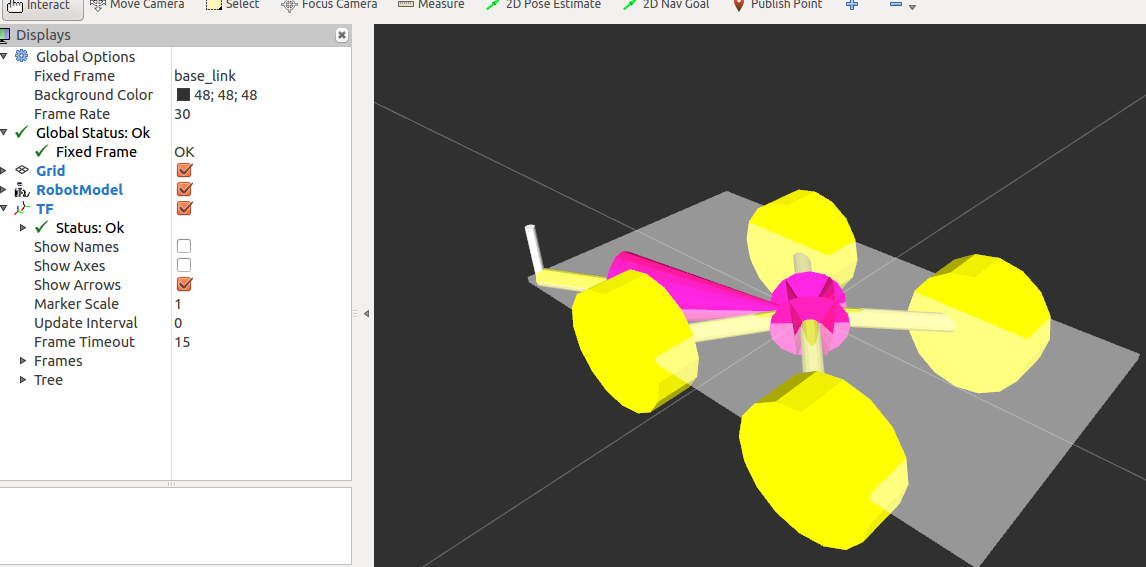
3)添加四个轮子

roslaunch smart_car display.launch gui:=true
4)添加四个柱子
上下层的四个角上是高3cm的柱子. 在上面urdf的基础上再添加下面的内容添加一个左前方的柱子。
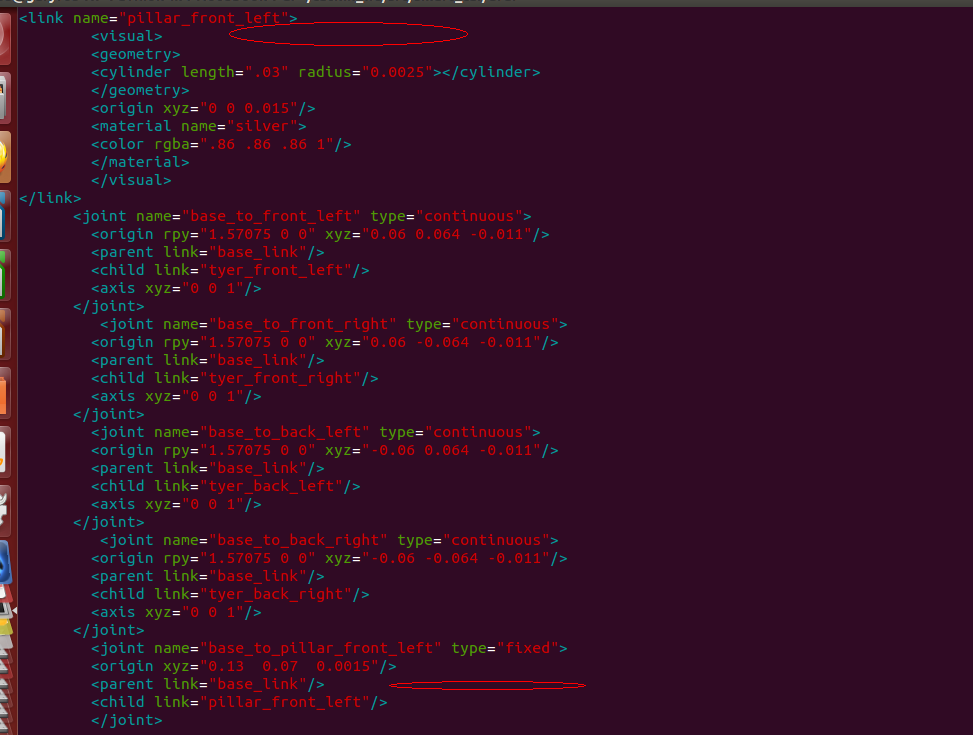
1. 柱子不转动,所以joint的类型为 fixed
2. joint里面定义改变了柱子的原点为 xyz="0.13 0.07 0.0015" 是相对base_link的
3. link里面也定义了原点为xyz="0 0 0.015", 这里只是显示上的偏移,它相对于joint里面定义的原点,但并不改变joint里面定义的物理原点
4. 接下来重复加三个柱子,详见最后一段的urdf定义
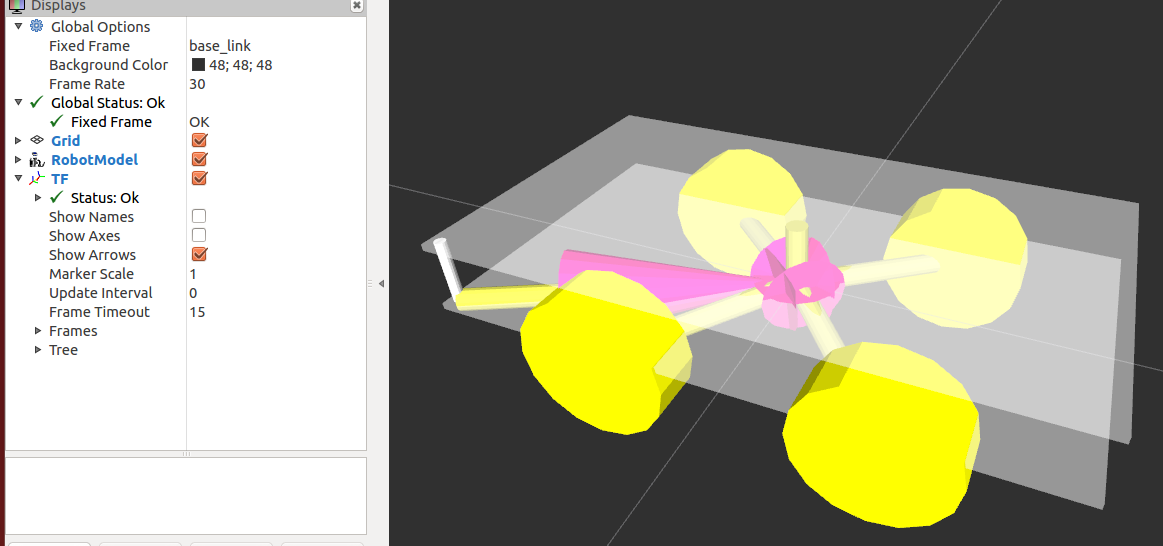
运行命令之后
5)添加上层
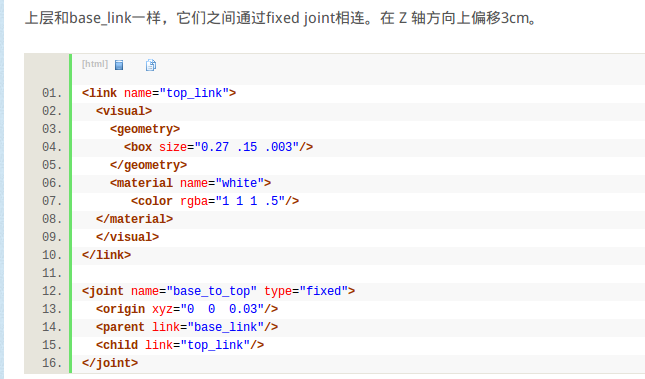
6)下面是完整的代码


<?xml version="1.0"?> <robot name="sp1s"> <link name="base_link"> <visual> <geometry> <box size="0.27 .15 .003"/> </geometry> <material name="white"> <color rgba="1 1 1 .5"/> </material> </visual> </link> <link name="tyer_front_left"> <visual> <geometry> <cylinder length=".025" radius="0.034"></cylinder> </geometry> <material name="yellow"> <color rgba="1 1 0 1"/> </material> </visual> </link> <link name="tyer_front_right"> <visual> <geometry> <cylinder length=".025" radius="0.034"></cylinder> </geometry> <material name="yellow"> <color rgba="1 1 0 1"/> </material> </visual> </link> <link name="tyer_back_left"> <visual> <geometry> <cylinder length=".025" radius="0.034"></cylinder> </geometry> <material name="yellow"> <color rgba="1 1 0 1"/> </material> </visual> </link> <link name="tyer_back_right"> <visual> <geometry> <cylinder length=".025" radius="0.034"></cylinder> </geometry> <material name="yellow"> <color rgba="1 1 0 1"/> </material> </visual> </link> <link name="pillar_front_left"> <visual> <geometry> <cylinder length=".03" radius="0.0025"></cylinder> </geometry> <origin xyz="0 0 0.015"/> <material name="silver"> <color rgba=".86 .86 .86 1"/> </material> </visual> </link> <link name="pillar_front_right"> <visual> <geometry> <cylinder length=".03" radius="0.0025"></cylinder> </geometry> <origin xyz="0 0 0.015"/> <material name="silver"> <color rgba=".86 .86 .86 1"/> </material> </visual> </link> <link name="pillar_back_left"> <visual> <geometry> <cylinder length=".03" radius="0.0025"></cylinder> </geometry> <origin xyz="0 0 0.015"/> <material name="silver"> <color rgba=".86 .86 .86 1"/> </material> </visual> </link> <link name="pillar_back_right"> <visual> <geometry> <cylinder length=".03" radius="0.0025"></cylinder> </geometry> <origin xyz="0 0 0.015"/> <material name="silver"> <color rgba=".86 .86 .86 1"/> </material> </visual> </link> <link name="top_link"> <visual> <geometry> <box size="0.27 .15 .003"/> </geometry> <material name="white"> <color rgba="1 1 1 .5"/> </material> </visual> </link> <joint name="base_to_top" type="fixed"> <origin xyz="0 0 0.03"/> <parent link="base_link"/> <child link="top_link"/> </joint> <joint name="base_to_front_left" type="continuous"> <origin rpy="1.57075 0 0" xyz="0.06 0.064 -0.011"/> <parent link="base_link"/> <child link="tyer_front_left"/> <axis xyz="0 0 1"/> </joint> <joint name="base_to_front_right" type="continuous"> <origin rpy="1.57075 0 0" xyz="0.06 -0.064 -0.011"/> <parent link="base_link"/> <child link="tyer_front_right"/> <axis xyz="0 0 1"/> </joint> <joint name="base_to_back_left" type="continuous"> <origin rpy="1.57075 0 0" xyz="-0.06 0.064 -0.011"/> <parent link="base_link"/> <child link="tyer_back_left"/> <axis xyz="0 0 1"/> </joint> <joint name="base_to_back_right" type="continuous"> <origin rpy="1.57075 0 0" xyz="-0.06 -0.064 -0.011"/> <parent link="base_link"/> <child link="tyer_back_right"/> <axis xyz="0 0 1"/> </joint> <joint name="base_to_pillar_front_left" type="fixed"> <origin xyz="0.13 0.07 0.0015"/> <parent link="base_link"/> <child link="pillar_front_left"/> </joint> <joint name="base_to_pillar_front_right" type="fixed"> <origin xyz="-0.13 0.07 0.0015"/> <parent link="base_link"/> <child link="pillar_front_right"/> </joint> <joint name="base_to_pillar_back_left" type="fixed"> <origin xyz="0.13 -0.07 0.0015"/> <parent link="base_link"/> <child link="pillar_back_left"/> </joint> <joint name="base_to_pillar_back_right" type="fixed"> <origin xyz="-0.13 -0.07 0.0015"/> <parent link="base_link"/> <child link="pillar_back_right"/> </joint> </robot>