好奇看了下自动驾驶技术的基础文章,汽车自从工业革命后成为了日常的交通工具,灵活性非常高,唯一不足的是安全性问题,自动驾驶在逐步解决安全性的问题。
一、自动驾驶分级
L0:人工驾驶
L1:辅助驾驶,比如定速巡航、ABS系统、ESP车身电子稳定系统
L2:部分自动驾驶,比如新文腾 IQ Driver
L3:有条件自动驾驶,比如奥迪、特斯拉
L4:高级自动驾驶,高级自动驾驶(远景规划)
L5:完全自动驾驶(远景规划)
二、L2级自动驾驶
1、高级自适应巡航
2、主动车道保持:车道保持在范围内
3、一键驾驶辅助:统筹自适应巡航和主动车道保持,0-160km/h
4、变道辅助:针对后车前车情况进行变道辅助
5、前后碰撞预警
6、二次碰撞刹车
7、方向盘离手检测
8、停车辅助
9、后方车流检测
三、技术原理
1、技术原理
感知:通过各种传感器完成,将环境信号转变为电子信号
决策:计算和判定操作结果
执行:控制机械完成信号输出
2、传感器
定位(导航,地图)、雷达(激光、毫米波)、视觉(摄像头、红外)、听觉传感器(超声波传感器)
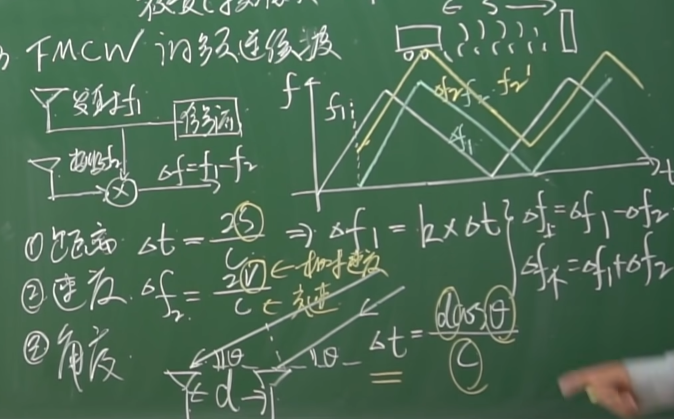
3、FMCW调频连续波
信号流程:发射-信号源-接收信号-不同的频率差
车辆通过调频连续波对障碍物进行识别,f1是原来的连续毫米波,一周周期内频率是往复变化
① 距离:绿色是接收到的信号,静止的物品,其中距离就是同一时刻两个f2-f1,k*(t2-t1)
② 速度:但是由于障碍物是在移动的,相对速度的为
③ 角度:通过相位差进行计算