傅里叶变换
参考资料
https://zhuanlan.zhihu.com/p/19763358
https://zhuanlan.zhihu.com/p/110026009
https://robots.ox.ac.uk/~az/lectures/ia/lect2.pdf
时域和频域
音乐类比:波形图是时域,乐谱(音符)是频域
单个音符是一个正弦波,不同振幅不同相位的正弦波叠加,可以构成任意波形
也就是说,任何周期函数都可以由正弦波叠加而成
傅里叶级数的频谱
我们用一系列正弦波叠加成矩形波
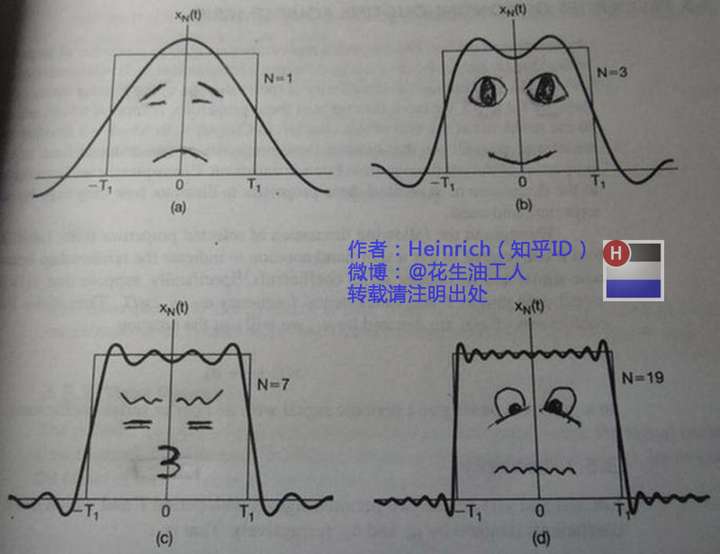
称不同频率的正弦波为频率分量
特别地,0频率(直线)被称为直流分量,它只造成整体上下平移
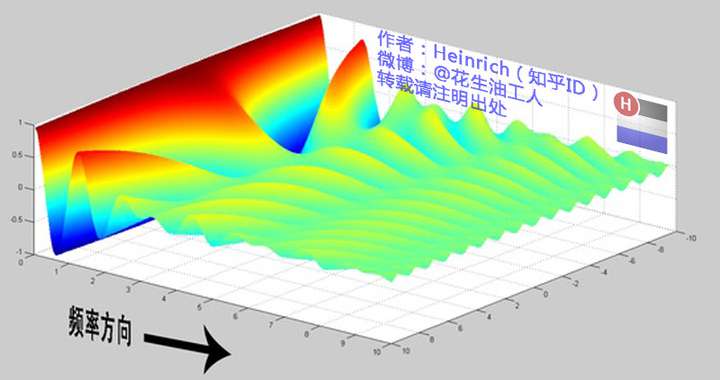
它的频域是这样的
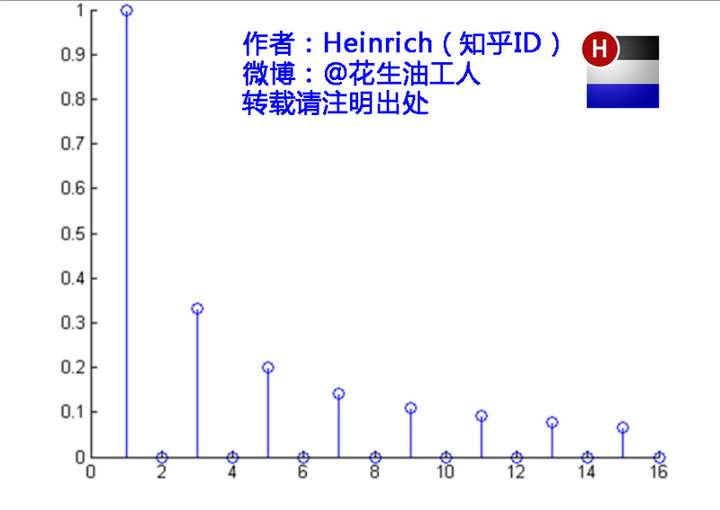
为什么?
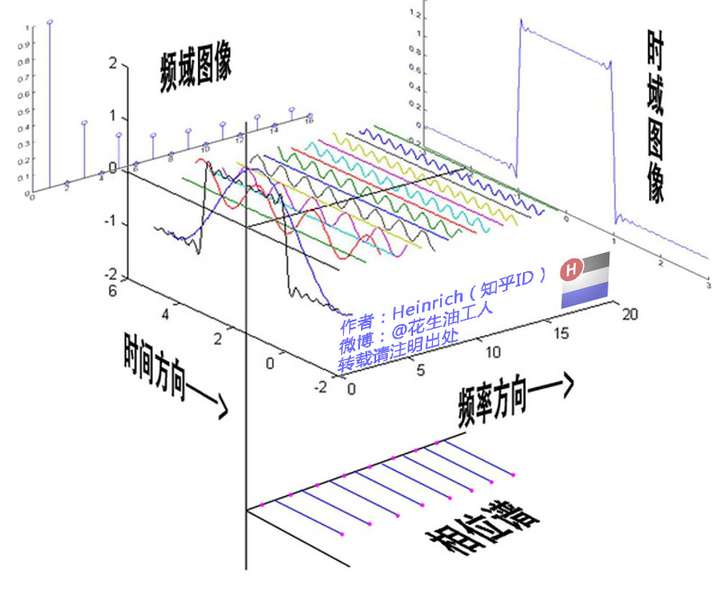
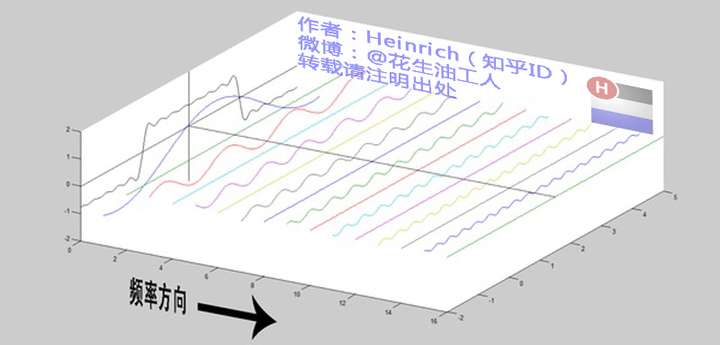
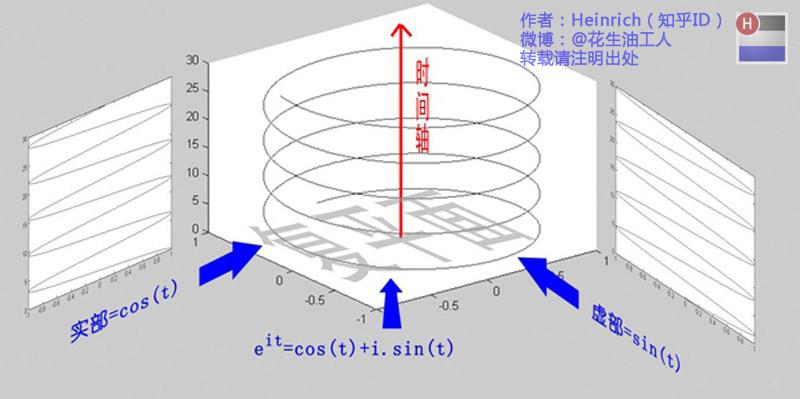
从三维空间看这些正弦波,如下:
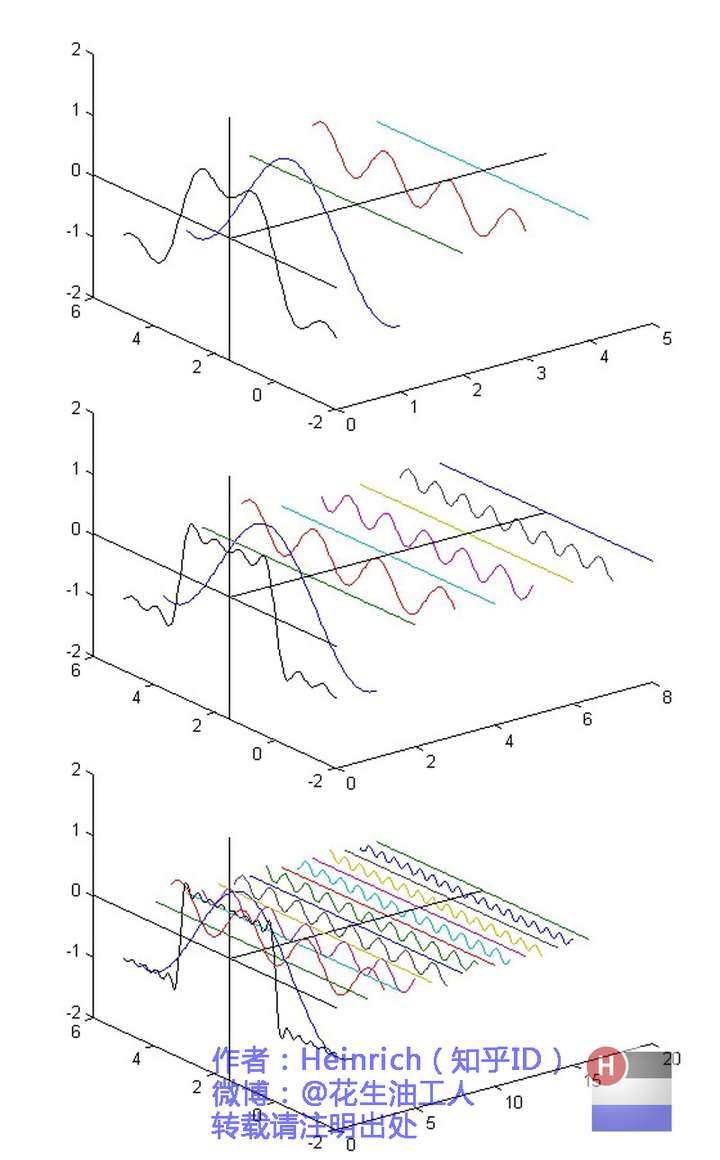
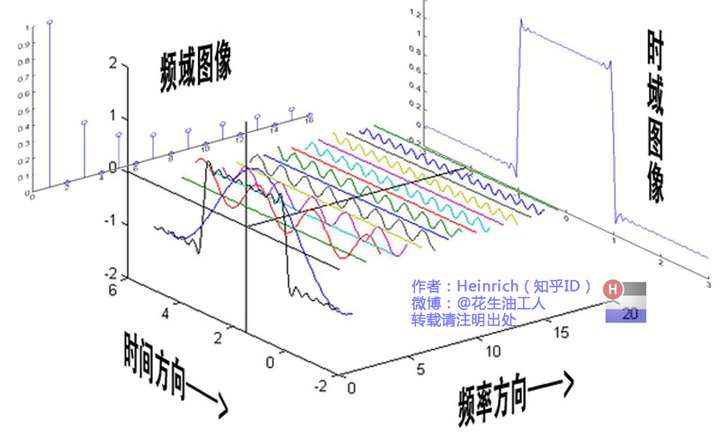
时域就是正面看,频域就是侧面看
傅里叶变换就是时域和频域之间的转换
傅里叶级数的相位谱
很多在时域不好做的操作,在频域可以轻松做到
确定一条正弦波需要知道振幅、频率和相位,从侧面看保留了振幅(y轴)和频率(x轴)信息
相位信息从哪来?
我们将离频率轴最近的波峰标记一个红点,再投影到下平面上,就得到了相位谱
傅里叶变换
终于到了傅里叶变换部分
我们要通过它,将时域的连续信号转化为频域的连续信号
区别于傅里叶级数,它将时域的连续信号转化成频域的离散信号
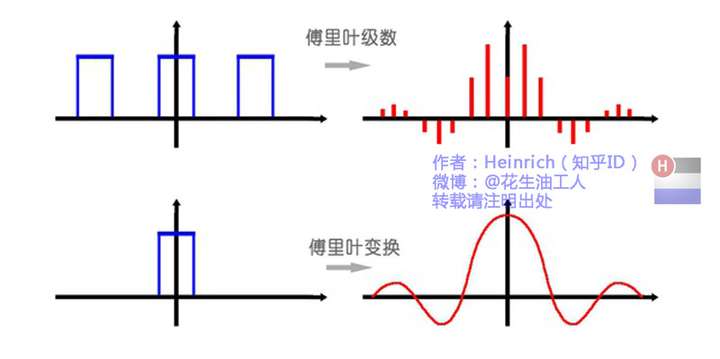
离散信号足够密集,就类似连续信号了
也就从求和符号变成积分符号了
欧拉公式
乘以\(i\)可以看成旋转90°(参考三蓝一棕)
从复平面法向量方向拉一条时间轴,用\(t\)替换\(x\),那么\(e^{it}\)可以看成一条螺旋线
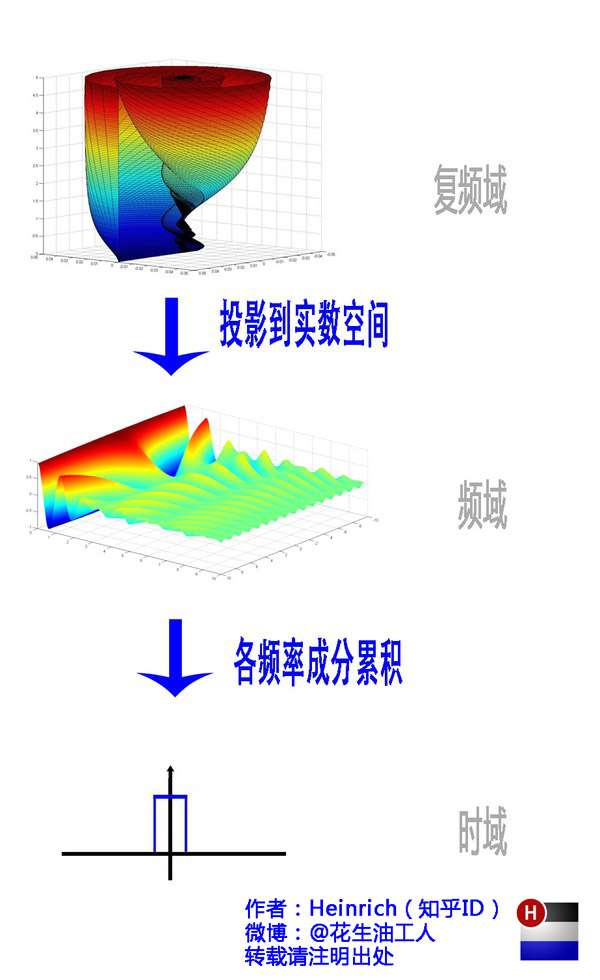
指数形式的傅里叶变换
由上图,正弦波的叠加,可以看成螺旋线的叠加在实数空间的投影
振幅——旋转半径
频率——旋转周期
相位——位置
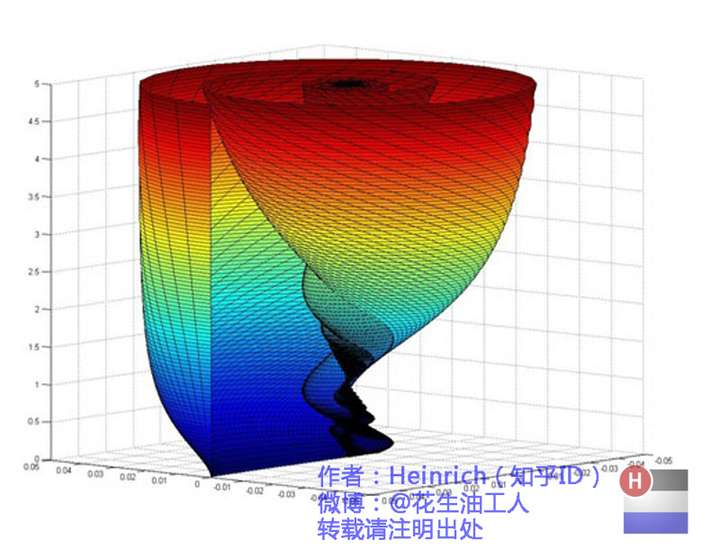
最终结果是这样的
一维公式
时域信号f(t)的傅里叶变换为
理解:对每个t,求\(f(t)\)和\(e^{-j\omega t}\)的内积,再求和,即\(f(t)\)在正弦波\(e^{-j\omega t}\)上的投影
反变换为
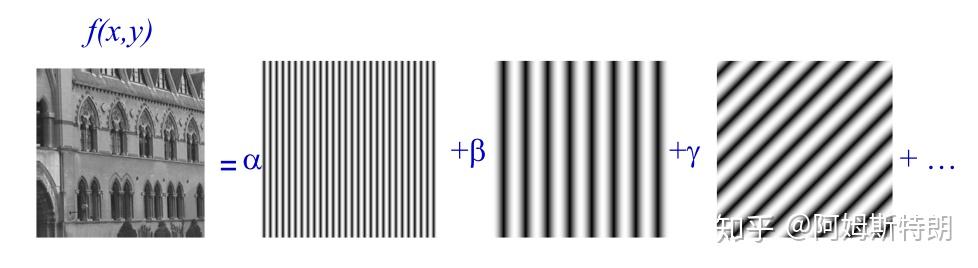
二维公式
将一个图像分解成复平面波之和
同样可以理解为:图像与不同频率不同方向的复平面波内积求和,即投影的过程
K空间
K空间即二维频率域
确定一个二维正弦平面波需要四个参数:振幅、频率、相位和方向向量
用复数存储幅振幅和相位,用二维向量表示频率和方向
(向量的方向为正弦波方向,向量的模长为频率,向量终点存复数)
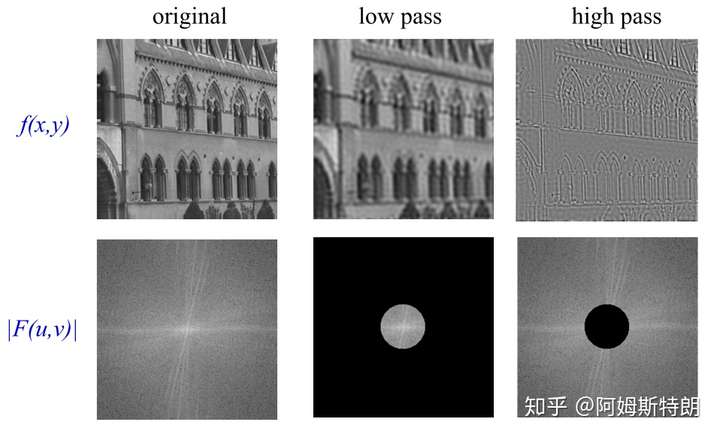
理解一下,越靠近中心原点,模长越小,频率越小,对应低频信息,提供主体信息
反之,越远离中心,模长越大,频率越大,对应高频信息,提供细节信息
更好地理解了SOD里的结论:
high-level features help locate the salient objects roughly, low-level features help refine boundaries.
这些向量放到二维平面中,就是K-SPACE了
K空间的每个复数代表了复平面波在原图像中占有多少成分,复系数乘以平面波相加就能得到原图像
平面波是基,K空间的数是系数,叠加就是原信息
K空间里的相位保留位置信息,幅度保留强度信息
图像旋转,K空间也旋转
Convolution Theorem
空间卷积=频域乘积
类似FFT,要对两个图像卷积,先分别FT,再相乘,再IFT即可
Sampling Theorem
如果f(x,y)的傅里叶变换对频率大于\(u_b\)和\(v_b\)的都为0
那么只要采样距离\(w\le\dfrac{1}{2u_b}\),\(h\le\dfrac{1}{2v_b}\),原图像就可以被完全恢复