朗日乘子法(Lagrange Multiplier)和KKT(Karush-Kuhn-Tucker)条件是求解约束优化问题的重要方法,在有等式约束时使用拉格朗日乘子法,在有不等约束时使用KKT条件。前提是:只有当目标函数为凸函数时,使用这两种方法才保证求得的是最优解。
1. 拉格朗日乘子法:

这个问题转换为

其中 ,称为拉格朗日乘子。
,称为拉格朗日乘子。
wikipedia上对拉格朗日乘子法的合理性解释:
现有一个二维的优化问题:

我们可以画图来辅助思考。

绿线标出的是约束 的点的轨迹。蓝线是
的点的轨迹。蓝线是 的等高线。箭头表示斜率,和等高线的法线平行。从图上可以直观地看到在最优解处,f和g的法线方向刚好相反(或者说叫梯度共线),即
的等高线。箭头表示斜率,和等高线的法线平行。从图上可以直观地看到在最优解处,f和g的法线方向刚好相反(或者说叫梯度共线),即

而满足(3)的点同时又是(4)的解。

所以(2)和(4)等价。
新方程F(x,y)在达到极值时与f(x,y)相等,因为F(x,y)达到极值时g(x,y)−c总等于零。
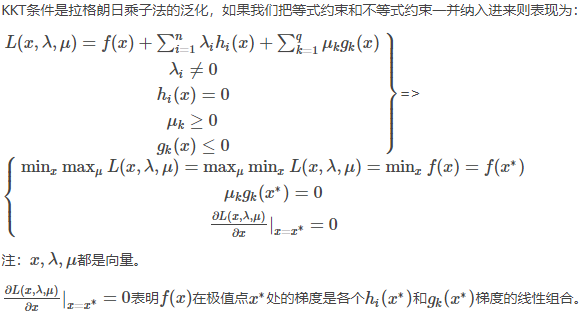
2.KKT条件

其中
上面的推导到此中断一下,我们看另外一个式子:

这里的 和
和 都就向量,所以去掉了下标k。另外一些博友不明白上式中
都就向量,所以去掉了下标k。另外一些博友不明白上式中 是怎么推出来的,其实很简单,因为f(x)与变量无关,所以这个等式就是成立的。
是怎么推出来的,其实很简单,因为f(x)与变量无关,所以这个等式就是成立的。
又

联合(7),(8)我们得到

增广朗日乘子法(Augumented Lagrange Multiplier)是对二次惩罚法(Quadratic Penalty Method)的一种改进,二次惩罚法要求二次惩罚项的系数趋近于无穷(对约束的偏离给予很高的惩罚)。
增广拉格朗日乘子法就是在原来的目标函数上加一个罚函数。罚函数因子 的话就是拉格朗日乘子法,乘子
的话就是拉格朗日乘子法,乘子 就是罚函数法。因为有约束项,所以加上罚函数以后问题的解是不变的。然后就很自然的有了增广拉格朗日函数。求解的方法比如:从一个相对比较小的罚函数因子
就是罚函数法。因为有约束项,所以加上罚函数以后问题的解是不变的。然后就很自然的有了增广拉格朗日函数。求解的方法比如:从一个相对比较小的罚函数因子 和选定的初始的乘子
和选定的初始的乘子 出发,在迭代中不断地求出
出发,在迭代中不断地求出 ,在把因子调大,同时更新乘子参数使其逼近最优的乘子
,在把因子调大,同时更新乘子参数使其逼近最优的乘子 。然后在罚函数因子变得非常大之前,一般就能把最优解得出来了。
。然后在罚函数因子变得非常大之前,一般就能把最优解得出来了。
多出一个二次惩罚项会使得算法的收敛速度很快,体现在理论上就是当很小时,每次乘子的更新可以变得很大。而且增广拉格朗日乘子法比拉格朗日乘子法普适性更好,需要的条件更加温和,比如不要求原函数是强凸的,甚至可以是非凸的,而且原函数可以趋近于无穷,而这种条件下,拉格朗日乘子法就无能为力了。究其原因,是因为二次惩罚项具有很好的矫正作用,在原函数非凸的情况下,只要满足一定的条件(二次惩罚项系数足够大),增广拉格朗日函数在最优点处的二阶导是正定的。因此具有严格的局部极小值。
来源:https://www.zhihu.com/question/23424344/answer/39935081
https://www.zhihu.com/question/23424344/answer/79955670
http://www.cnblogs.com/zhangchaoyang