PaperImpl- Fast Software for Box Intersections
论文阅读参见:https://www.cnblogs.com/grass-and-moon/p/13344913.html
CGAL的实现参见:https://www.cnblogs.com/grass-and-moon/p/13353521.html
CGAL实现的使用参见:https://www.cnblogs.com/grass-and-moon/p/13219926.html
完整的代码实现,如下,具体的每个步骤的理解,可以参见上面的论文阅读以及CGAL的实现浏览。
此处需要注意的是,BoxIntersection传入的迭代器需要是对应指针的迭代器。
#include <iostream>
#include <limits>
#include <vector>
#include <functional>
#include <algorithm>
#include <unordered_map>
#include "OpenMesh/Core/Mesh/TriMesh_ArrayKernelT.hh"
#include "OpenMesh/Core/IO/MeshIO.hh"
typedef OpenMesh::TriMesh_ArrayKernelT<> MyMesh;
struct Box;
typedef std::unordered_map<std::string, const Box*> MapInterBox;
const double inf = -std::numeric_limits<double>::max();
const double sup = std::numeric_limits<double>::max();
#define EPSION 0
struct Box
{
double lo[3] = { sup, sup, sup };
double hi[3] = { inf, inf, inf };
MyMesh::Point pt[3];
};
std::string GenerateUID(const Box* a)
{
std::stringstream ss;
ss << a;
return ss.str();
}
void UpdateBox(Box &box, const MyMesh::Point &pt)
{
for (int i = 0; i < 3; ++i)
{
if (pt[i] < box.lo[i])
box.lo[i] = pt[i];
if (pt[i] > box.hi[i])
box.hi[i] = pt[i];
}
}
struct BoxInterCallback
{
BoxInterCallback() = default;
void operator()(const Box* a, const Box* b)
{
std::string uid = GenerateUID(a);
if (mapInterBox.count(uid) == 0)
{
mapInterBox[uid] = a;
}
uid = GenerateUID(b);
if (mapInterBox.count(uid) == 0)
{
mapInterBox[uid] = b;
}
}
MapInterBox mapInterBox;
};
struct BoxPredicate
{
static auto CompareFunc(int dim)
{
return [=](const Box* a, const Box* b) -> bool {
return IsLoLessLo(a, b, dim);
};
}
static auto SpanningFunc(double lo, double hi, int dim)
{
// 如果[lo, hi)在box的范围内,那么返回true
return [=](const Box* a) -> bool {
return a->lo[dim] < lo - EPSION && a->hi[dim] > hi + EPSION;
};
}
static auto LoLessFunc(double value, int dim)
{
return [=](const Box* a) -> bool {
return a->lo[dim] < value - EPSION;
};
}
static auto HiGreaterFunc(double value, int dim)
{
return [=](const Box* a) -> bool {
return HiGreater(a->hi[dim], value);
};
}
static bool HiGreater(double hi, double val)
{
return hi >= val + EPSION;
}
static bool IsLoLessLo(const Box* a, const Box *b, int dim)
{
return a->lo[dim] < b->lo[dim];
}
static bool IsLoLessHi(const Box* a, const Box *b, int dim)
{
return HiGreater(b->hi[dim], a->lo[dim]);
}
static bool IsIntersect(const Box* a, const Box* b, int dim)
{
return IsLoLessHi(a,b,dim) && IsLoLessHi(b,a,dim);
}
static bool ContainsLoPoint(const Box* a, const Box* b, int dim)
{
return IsLoLessLo(a,b,dim) && IsLoLessHi(b,a,dim);
}
};
typedef std::function<void(const Box&, const Box&)> InterpCallback;
template< class RandomAccessIter1, class RandomAccessIter2,
class Callback>
void OneWayScan(
RandomAccessIter1 iBegin, RandomAccessIter1 iEnd,
RandomAccessIter2 pBegin, RandomAccessIter2 pEnd,
int dim, Callback& callback)
{
/// 对P和对I(根据I的low endpoint)进行排序;
std::sort(iBegin, iEnd, BoxPredicate::CompareFunc(0));
std::sort(pBegin, pEnd, BoxPredicate::CompareFunc(0));
/// 遍历interval
for (auto i = iBegin; i != iEnd; ++i)
{
/// 对P进行遍历,直到找到p1不小于第一个intervals的low endpoints点
for (; pBegin != pEnd&& BoxPredicate::IsLoLessLo((*pBegin), (*i), 0); ++pBegin) {}
/// 继续对点进行遍历,直到找到一个点p2不小于第一个intervals的high endpoint点;
/// 所有找到的点,属于第一个intervals;
for (auto p1 = pBegin; p1 != pEnd && BoxPredicate::IsLoLessHi(*p1, *i, 0); ++p1)
{
/// 如果第d为大于0,那么还需要直接判断其他维度是否相交,
/// 如果有某个维度不相交,那么i和p1就不相交
bool bIntersect = true;
for (int d=1; d<=dim; ++d)
{
if (!BoxPredicate::IsIntersect(*p1, *i, d))
{
bIntersect = false;
break;
}
}
if (bIntersect)
{
callback(*i, *p1);
}
}
}
}
template<class RandomAccessIter1, class RandomAccessIter2,
class Callback>
void ModifiedTwoWayScan(
RandomAccessIter1 iBegin, RandomAccessIter1 iEnd,
RandomAccessIter2 pBegin, RandomAccessIter2 pEnd,
int dim, Callback& callback)
{
std::sort(iBegin, iEnd, BoxPredicate::CompareFunc(0));
std::sort(pBegin, pEnd, BoxPredicate::CompareFunc(0));
while (iBegin != iEnd && pBegin != pEnd)
{
// 此时i作为interval,p为points
if (BoxPredicate::IsLoLessLo(*iBegin, *pBegin, 0))
{
for (RandomAccessIter2 p = pBegin; p != pEnd && BoxPredicate::IsLoLessHi(*p, *iBegin, 0); ++p)
{
bool bIntersect = true;
for (int d = 1; d <= dim; ++d)
{
if (!BoxPredicate::IsIntersect(*p, *iBegin, d))
{
bIntersect = false;
break;
}
}
if (bIntersect)
{
callback(*iBegin, *p);
}
}
++iBegin;
}
else
{
// 将p作为interval,i作为point
for (RandomAccessIter1 i = iBegin; i != iEnd && BoxPredicate::IsLoLessHi(*i, *pBegin, 0); ++i)
{
bool bIntersect = true;
for (int d = 1; d <= dim; ++d)
{
if (!BoxPredicate::IsIntersect(*pBegin, *i, d))
{
bIntersect = false;
break;
}
}
if (bIntersect)
{
callback(*i, *pBegin);
}
}
++pBegin;
}
}
}
template< class RandomAccessIter>
RandomAccessIter SplitPoints(RandomAccessIter begin, RandomAccessIter end, int dim, double& mi)
{
std::ptrdiff_t delta = std::distance(begin, end);
std::ptrdiff_t halfDelta = delta / 2;
RandomAccessIter mid = begin + halfDelta;
mi = (*mid)->lo[dim];
return std::partition(begin, end, BoxPredicate::LoLessFunc(mi, dim));
}
template<class RandomAccessIter1, class RandomAccessIter2, class Callback>
void SegmentTree( RandomAccessIter1 iBegin, RandomAccessIter1 iEnd,
RandomAccessIter2 pBegin, RandomAccessIter2 pEnd,
double lo, double hi, Callback& callback, std::ptrdiff_t cutoff, int dim)
{
if (pBegin == pEnd || iBegin == iEnd || lo >= hi)
{
return;
}
if (dim == 0)
{
//std::cout << "dim = 0. scanning ..." << std::endl;
OneWayScan(iBegin, iEnd, pBegin, pEnd, dim, callback);
return;
}
if (std::distance(pBegin, pEnd) < cutoff ||
std::distance(iBegin, iEnd) < cutoff)
{
ModifiedTwoWayScan(iBegin, iEnd, pBegin, pEnd, dim, callback);
return;
}
RandomAccessIter1 iSpanEnd = lo == inf || hi == sup ? iBegin :
std::partition(iBegin, iEnd, BoxPredicate::SpanningFunc(lo, hi, dim));
if (iBegin != iSpanEnd)
{
SegmentTree(iBegin, iSpanEnd, pBegin, pEnd, inf, sup, callback, cutoff, dim-1);
SegmentTree(pBegin, pEnd, iBegin, iSpanEnd, inf, sup, callback, cutoff, dim-1);
}
double mi(0);
RandomAccessIter2 pMid = SplitPoints(pBegin, pEnd, dim, mi);
if (pMid == pBegin || pMid == pEnd)
{
//std::cout << "unable to split points! performing modified two_way_scan ... " << std::endl;
ModifiedTwoWayScan(iSpanEnd, iEnd, pBegin, pEnd, dim, callback);
return;
}
RandomAccessIter1 iMid = std::partition(iSpanEnd, iEnd, BoxPredicate::LoLessFunc(mi, dim));
//std::cout << "Processing ->left" << std::endl;
SegmentTree(iSpanEnd, iMid, pBegin, pMid, lo, mi, callback, cutoff, dim);
iMid = std::partition(iSpanEnd, iEnd, BoxPredicate::HiGreaterFunc(mi, dim));
//std::cout << "Processing ->right" << std::endl;
SegmentTree(iSpanEnd, iMid, pMid, pEnd, mi, hi, callback, cutoff, dim);
}
template<class RandomAccessIter1, class RandomAccessIter2, class Callback>
void BoxIntersection(
RandomAccessIter1 begin1, RandomAccessIter1 end1,
RandomAccessIter2 begin2, RandomAccessIter2 end2,
Callback& callback,
std::ptrdiff_t cutoff = 10)
{
const int dim = 2; // start from 0
SegmentTree(begin2, end2, begin1, end1, inf, sup, callback, cutoff, dim);
SegmentTree(begin1, end1, begin2, end2, inf, sup, callback, cutoff, dim);
}
void ConvertMeshToBox(MyMesh& mesh, std::vector<Box>& vecBox, std::vector<Box*>& vecBoxPtr)
{
for (auto face : mesh.faces())
{
Box box;
int i=0;
for (auto vertice : face.vertices())
{
box.pt[i++] = mesh.point(vertice);
UpdateBox(box, mesh.point(vertice));
}
vecBox.push_back(box);
}
for (int i = 0; i < vecBox.size(); ++i)
{
vecBoxPtr.push_back(&vecBox[i]);
}
}
void WriteResult(const MapInterBox& result, const std::string& fileout)
{
std::ofstream of;
of.open(fileout, std::ios::out);
of << "STLFILE
";
for (auto iter = result.begin(); iter != result.end(); ++iter)
{
auto pBox = iter->second;
auto normal = (pBox->pt[0] - pBox->pt[1]).cross(pBox->pt[0] - pBox->pt[2]);
normal.normalize();
of << "facet normal " << normal[0] << " " << normal[1] << " " << normal[2] << "
";
of << "outer loop
";
for (int j=0; j<3; ++j)
{
auto pt = pBox->pt[j];
of << "vertex " << pt[0] << " " << pt[1] << " " << pt[2] << "
";
}
of << "endloop
";
of << "endfacet
";
}
of << "endsolidfilenamestl";
of.close();
}
std::vector<Box> vecMeshBox1, vecMeshBox2;
std::vector<Box*> vecMeshBoxPtr1, vecMeshBoxPtr2;
void ReadMesh(MyMesh& mesh, std::string file)
{
if (!OpenMesh::IO::read_mesh(mesh, file))
{
std::cerr << "read " << file << " failed!" << std::endl;
}
}
int test_intersection()
{
auto t1 = std::chrono::steady_clock::now();
BoxInterCallback callback;
BoxIntersection(vecMeshBoxPtr1.begin(), vecMeshBoxPtr1.end(), vecMeshBoxPtr2.begin(), vecMeshBoxPtr2.end(), callback);
auto t2 = std::chrono::steady_clock::now();
std::cout << "BoxIntersection cost: " << std::chrono::duration<double, std::milli>(t2-t1).count() << "ms" << std::endl;
std::string fileout = "E:/stl/intersect_result_box.stl";
WriteResult(callback.mapInterBox, fileout);
return 0;
}
void test_one_way_scan()
{
BoxInterCallback callback;
OneWayScan(vecMeshBoxPtr1.begin(), vecMeshBoxPtr1.end(), vecMeshBoxPtr2.begin(), vecMeshBoxPtr2.end(), 2, callback);
OneWayScan(vecMeshBoxPtr1.begin(), vecMeshBoxPtr1.end(), vecMeshBoxPtr2.begin(), vecMeshBoxPtr2.end(), 2, callback);
std::string fileout = "E:/stl/one_way_test_xyz_double.stl";
WriteResult(callback.mapInterBox, fileout);
}
void test_modified_two_way_scan()
{
BoxInterCallback callback;
ModifiedTwoWayScan(vecMeshBoxPtr1.begin(), vecMeshBoxPtr1.end(), vecMeshBoxPtr2.begin(), vecMeshBoxPtr2.end(), 2, callback);
std::string fileout = "E:/stl/modified_two_way_scan.stl";
WriteResult(callback.mapInterBox, fileout);
}
int main()
{
MyMesh mesh1, mesh2;
ReadMesh(mesh1, "E:/stl/Reamers52.STL");
ReadMesh(mesh2, "E:/stl/semi-sphere.stl");
ConvertMeshToBox(mesh1, vecMeshBox1, vecMeshBoxPtr1);
ConvertMeshToBox(mesh2, vecMeshBox2, vecMeshBoxPtr2);
test_intersection();
// test_one_way_scan();
// test_modified_two_way_scan();
return 0;
}
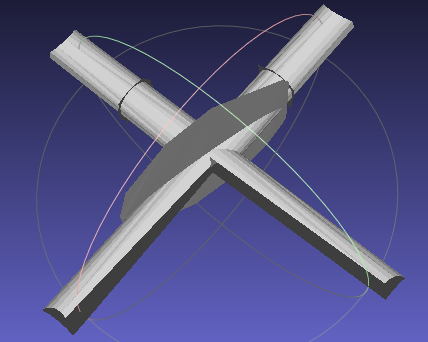
原始图如下:
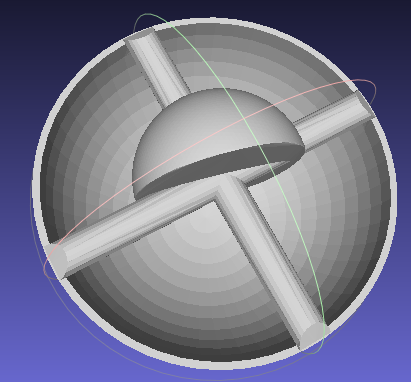
结果图如下: