一 递归方法
后端(Backend)
- 带噪声的数据估计内在状态——状态估计问题
- Estimated the inner state from noisy data
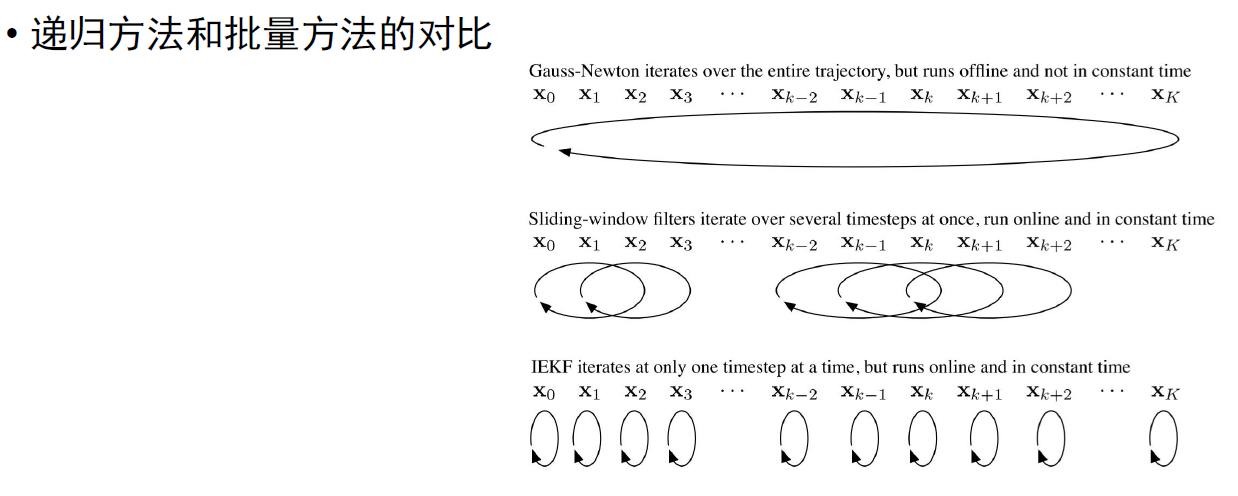
渐进式(Incremental/Recursive)
- 保持当前状态的估计,在加入新信息时,更新已有的估计(滤波)
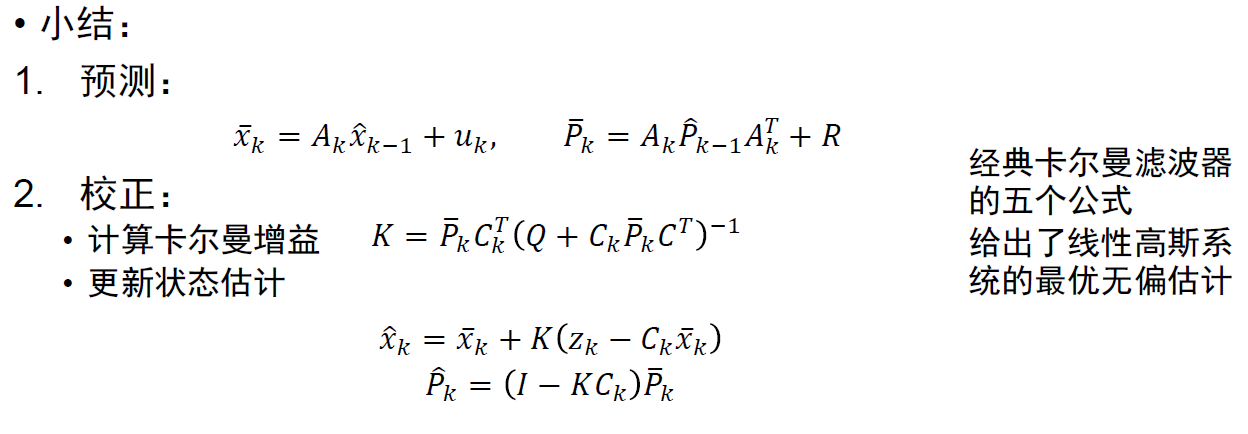
- 线性系统+高斯噪声=卡尔曼滤波器
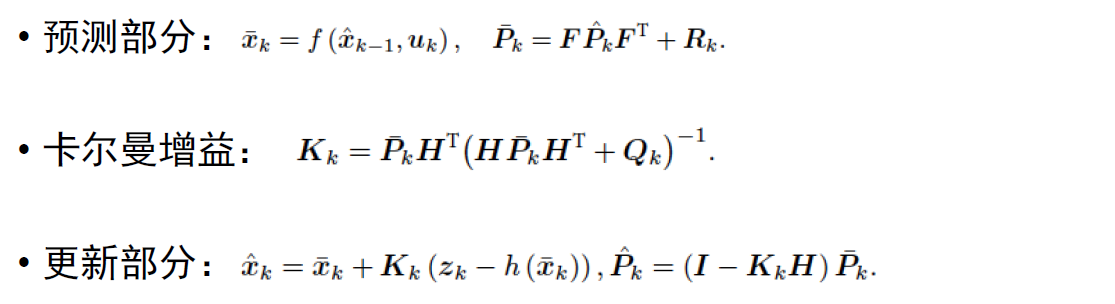
- 非线性系统+高斯噪声+线性近似=扩展卡尔曼
- 非线性系统+非高斯噪声+非参数化=粒子滤波器
- Sliding window filter & multiple state Kalman (MSCKF)
批量式(Batch)
- 给定一定规模的数据,计算该数据下的最优估计(优化)
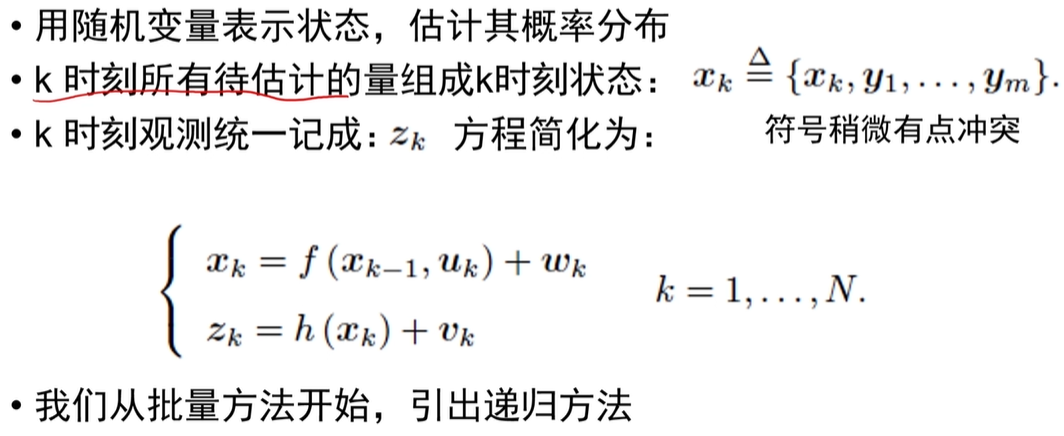
数学描述
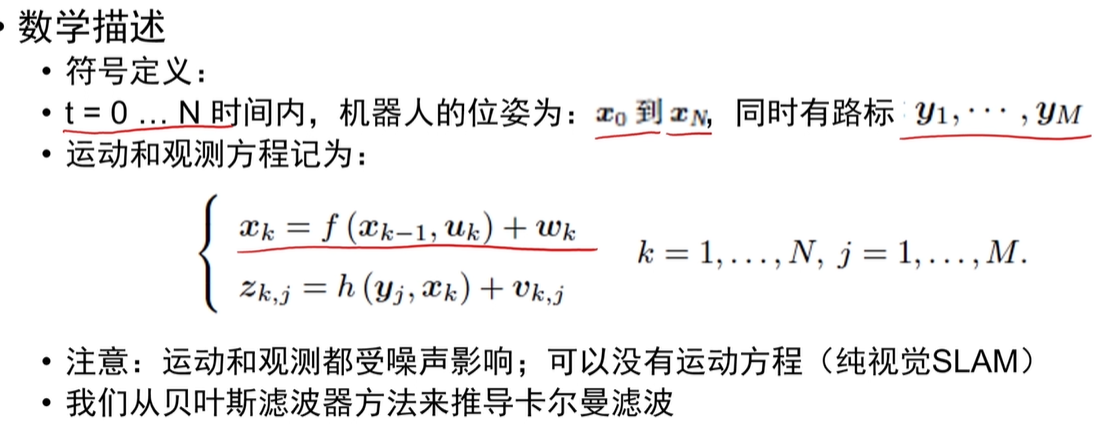
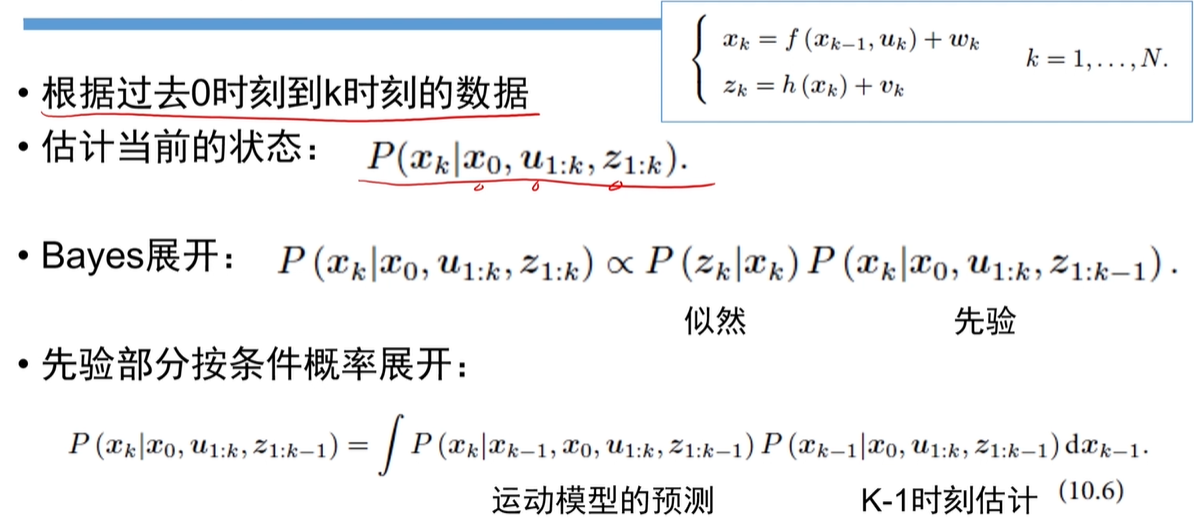
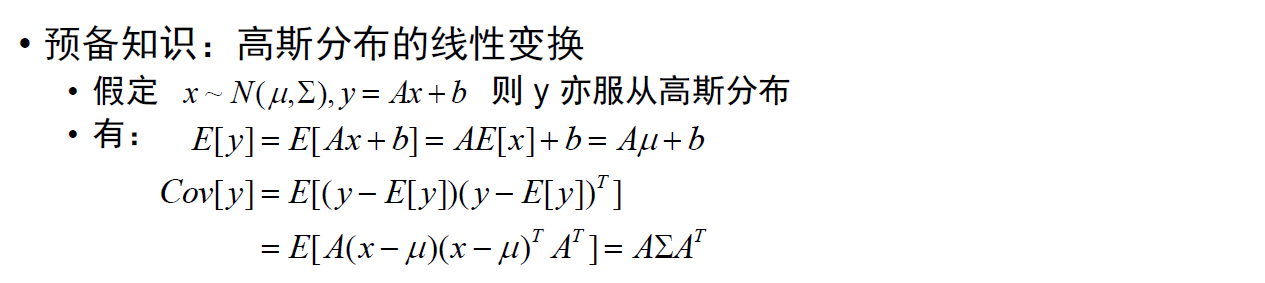
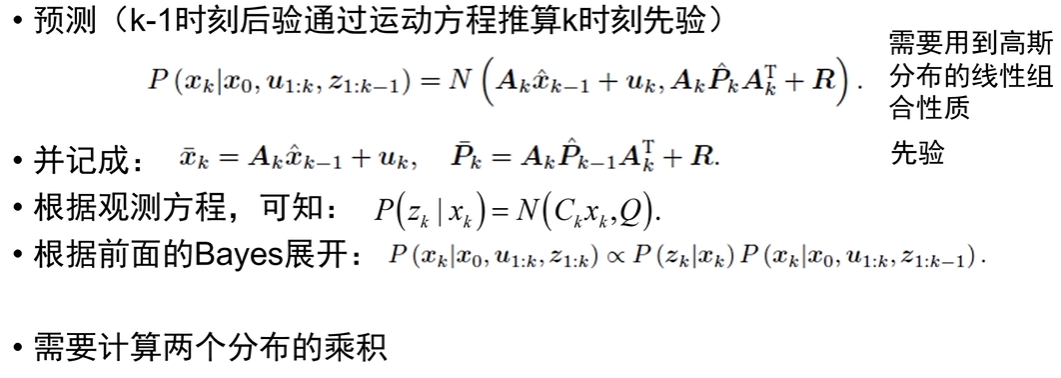
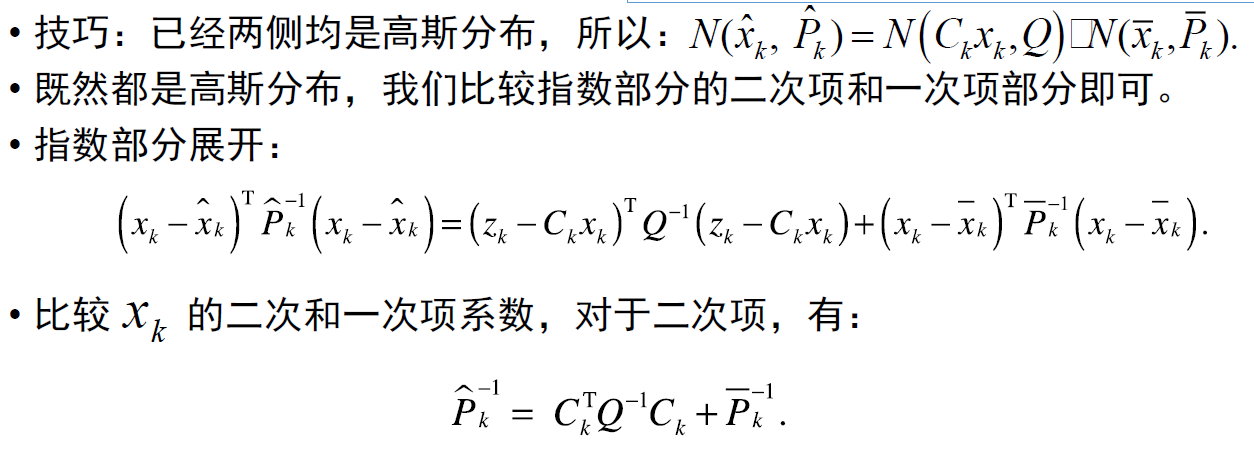
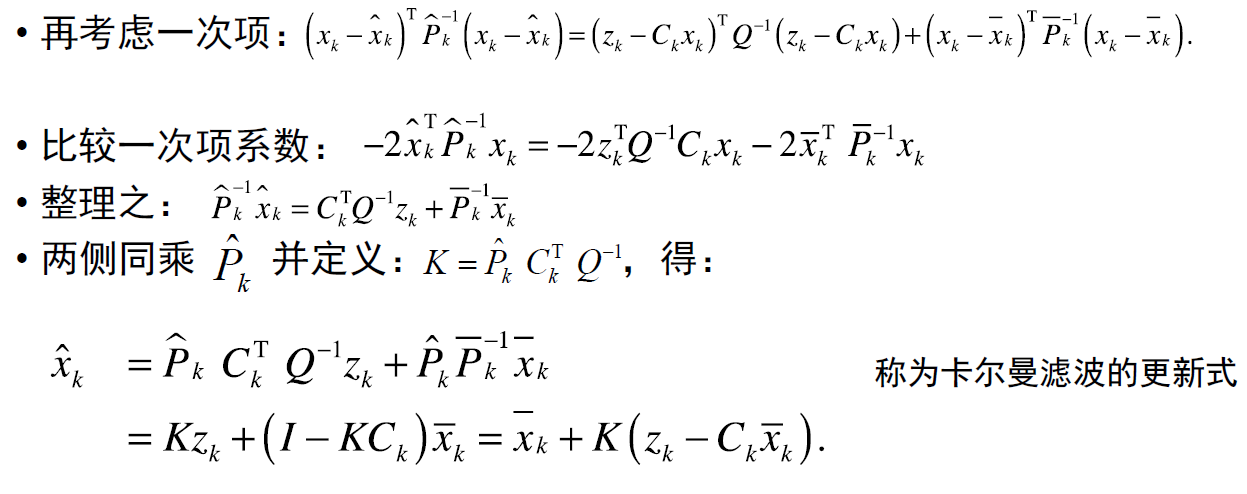
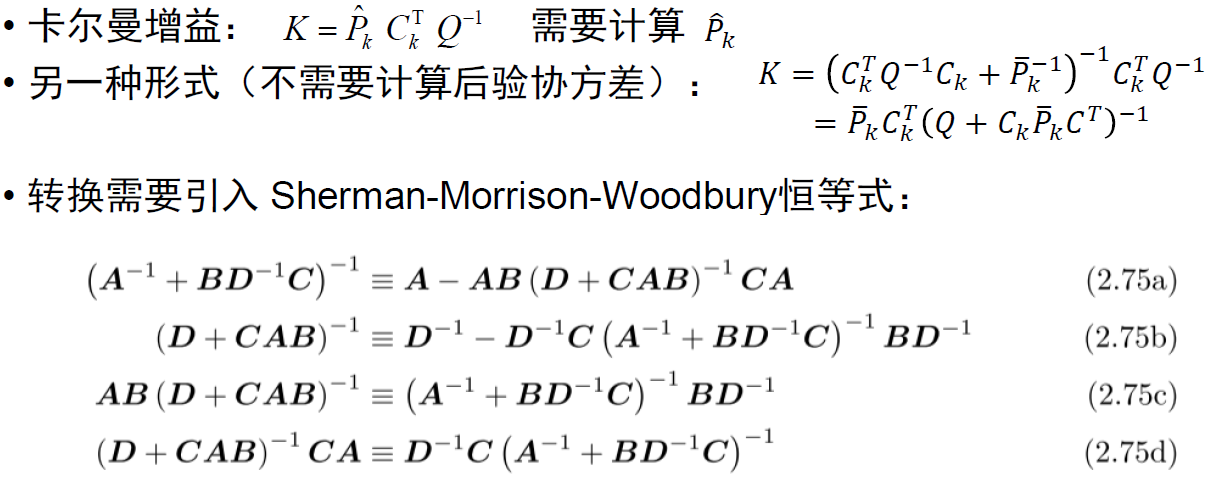
从贝叶斯滤波器来推导卡尔曼滤波器



Kalman Filter 的非线性扩展: EKF

优点
- 推导简单清楚,适用各种传感器形式
- 易于做多传感器融合
缺点
- 一阶马尔可夫性过于简单
- 可能会发散(要求数据不能有 outlier
- 线性化误差
- 需要存储所有状态量的均值和方差,平方增长
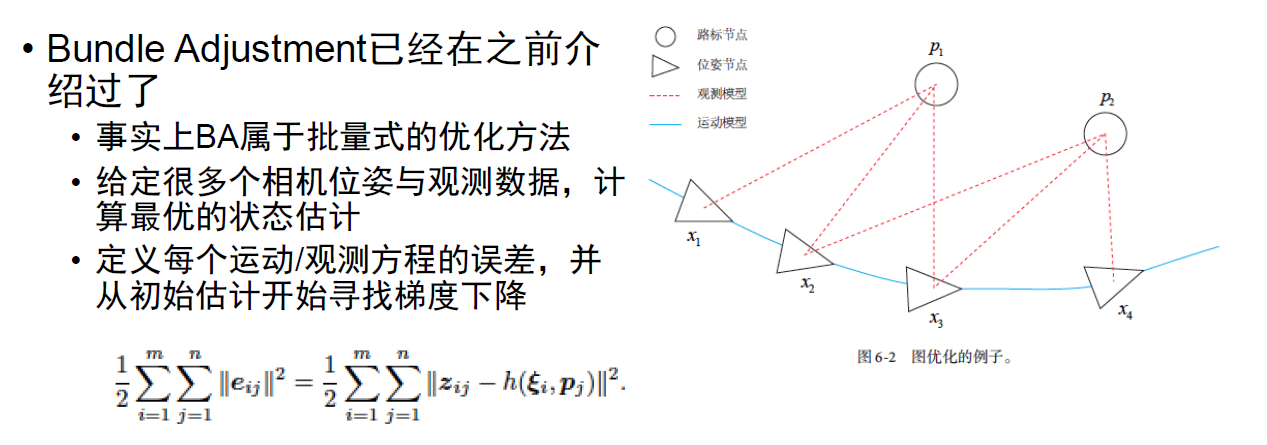
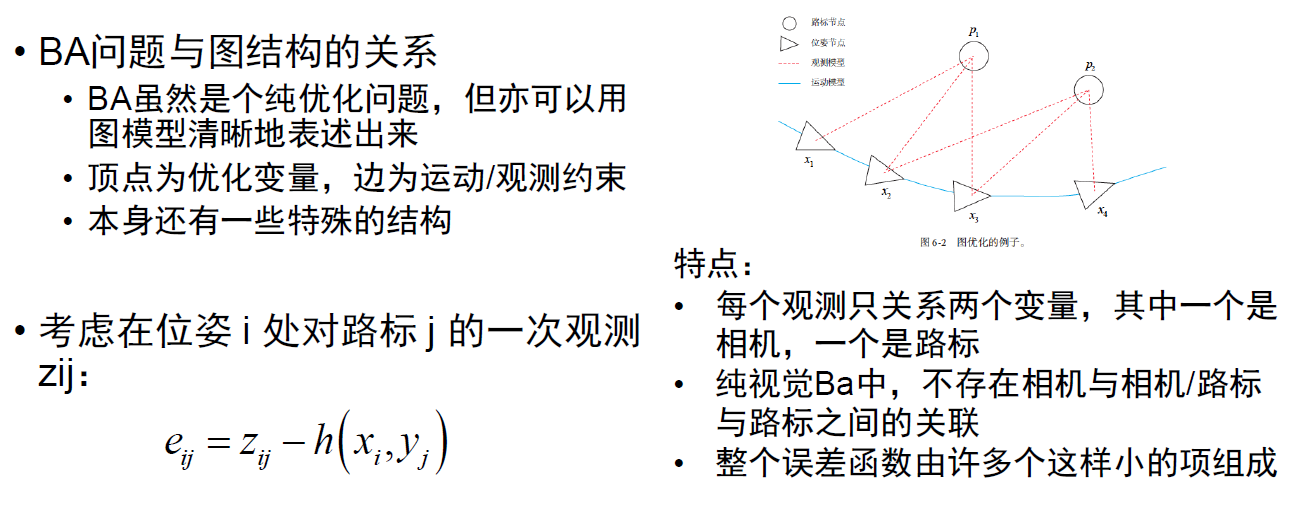
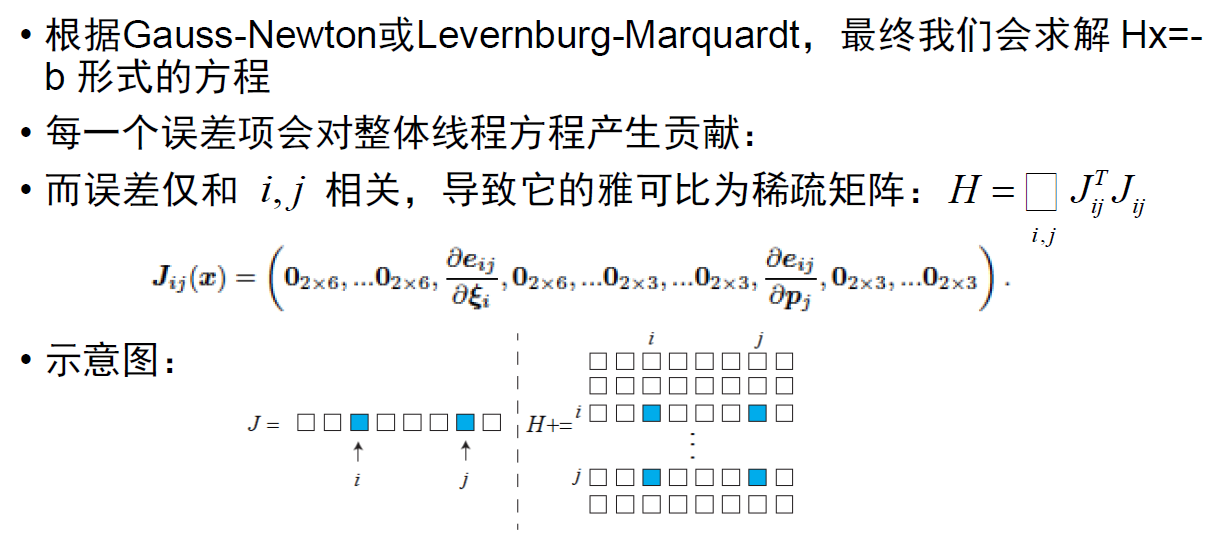
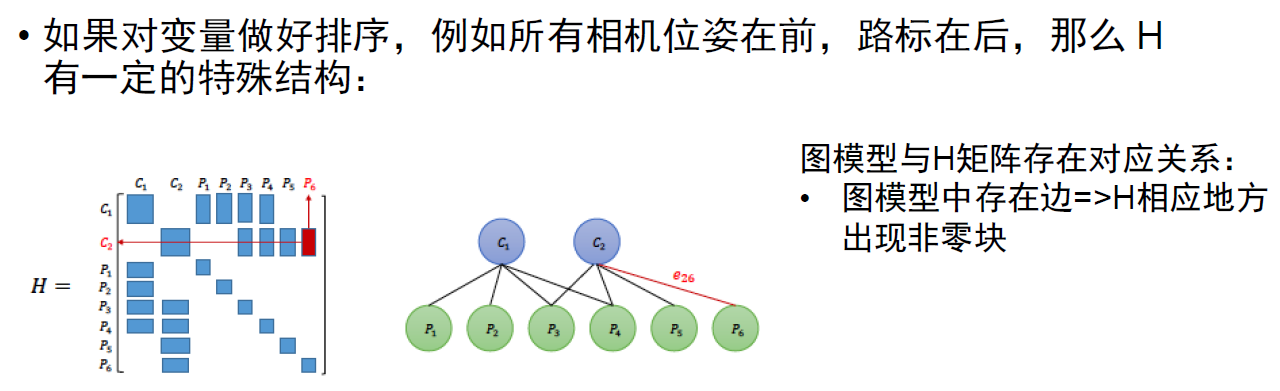
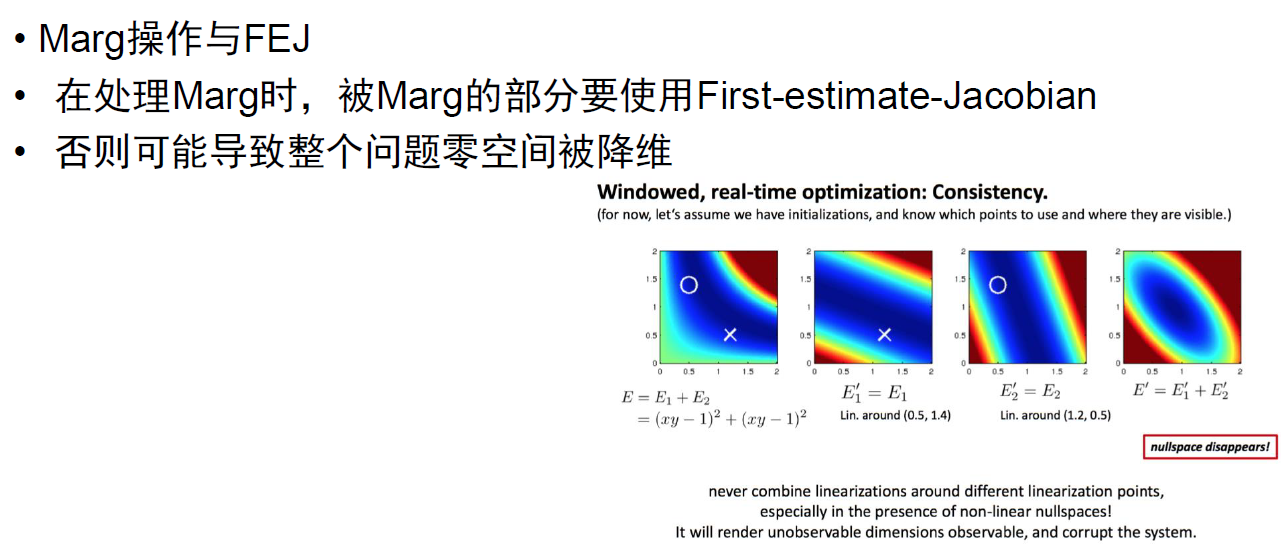
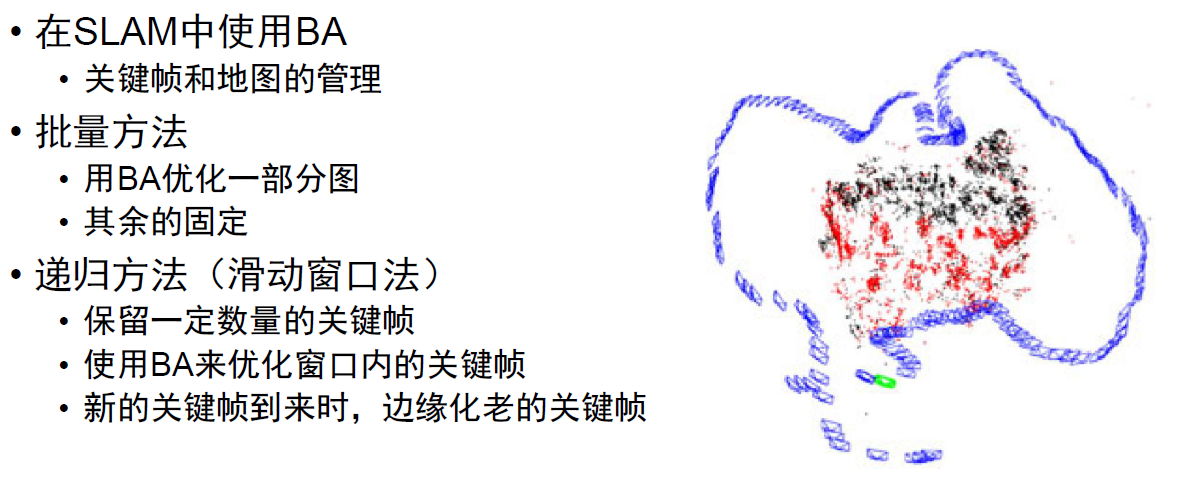
二 批量方法


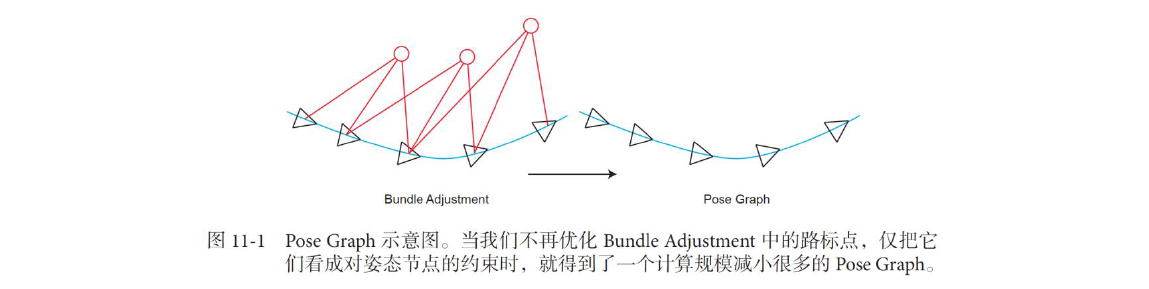
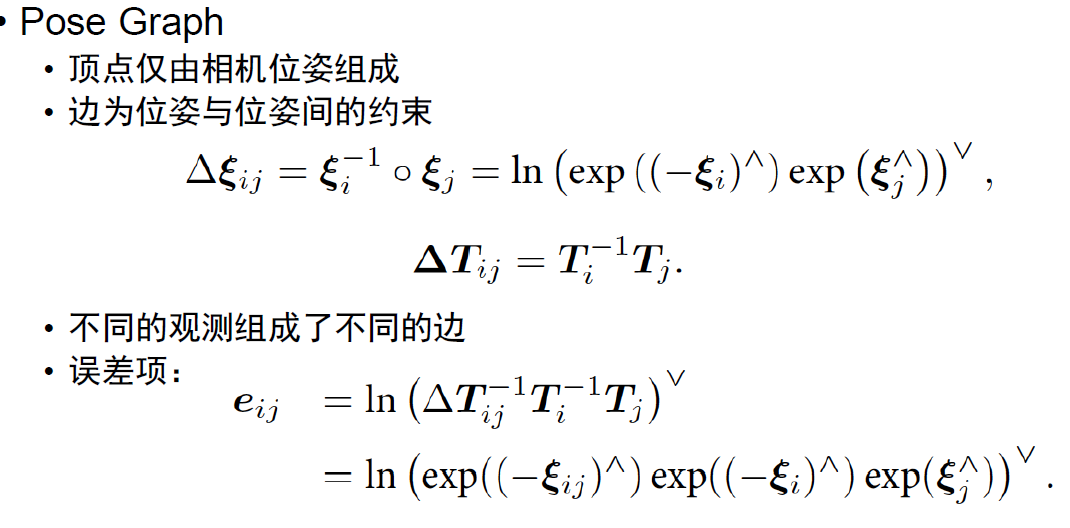
三 Pose Graph
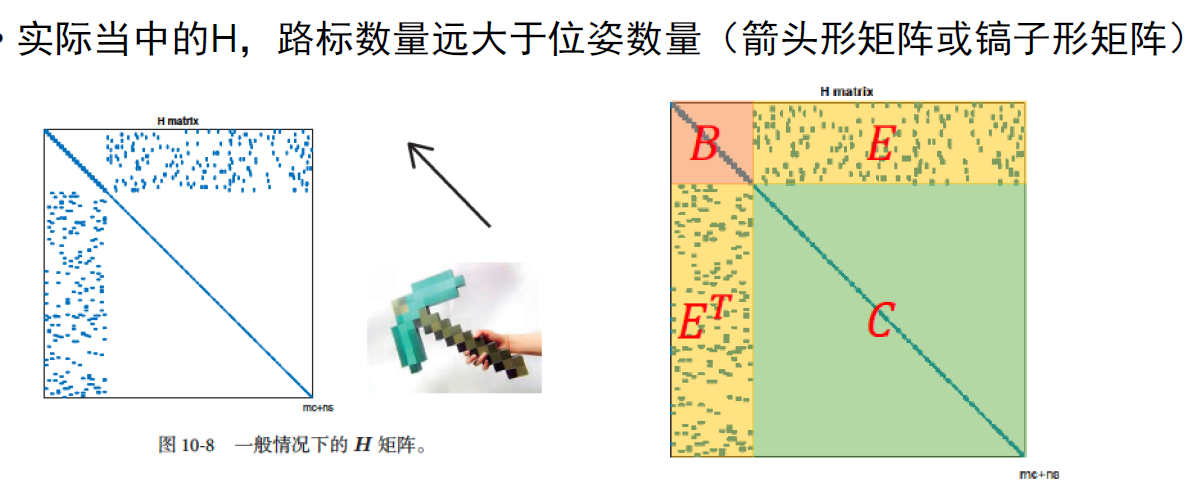
实际当中 BA 的计算量很大
• 通常放在单独的后台线程中计算而无法实时
• 主要计算来自于大量的特征点
Pose Graph 即是省略了特征点的 Bundle Adjustment