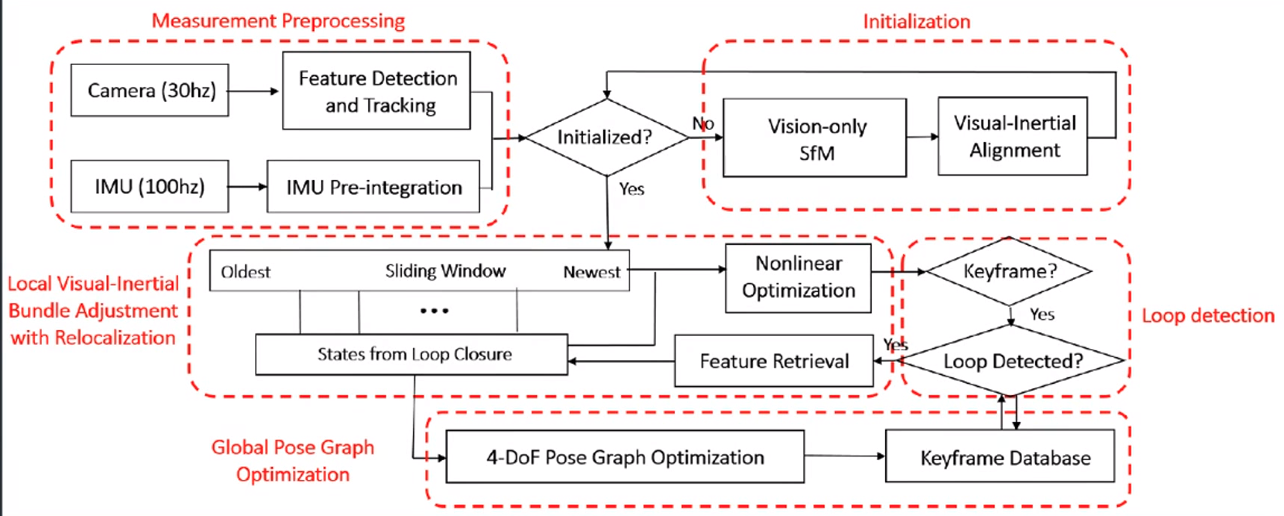
基本框架如下图所示
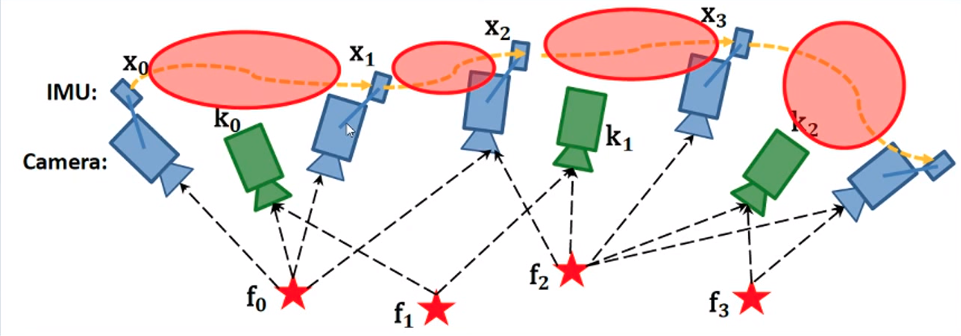
黄色的是IMU的帧间约束(PVQBaBg 15*1) 蓝色为视觉重投影误差约束(2*1) 绿色为闭环帧,用来计算相对位资,用于闭环优化时使用 红色的是IMU预计分步骤
本文重点看IMU约束与视觉约束