| PC -> Ubuntu 16.04 - > ROS Kinetic |
| Android系统手机 |
1、Android移动端APP下载安装
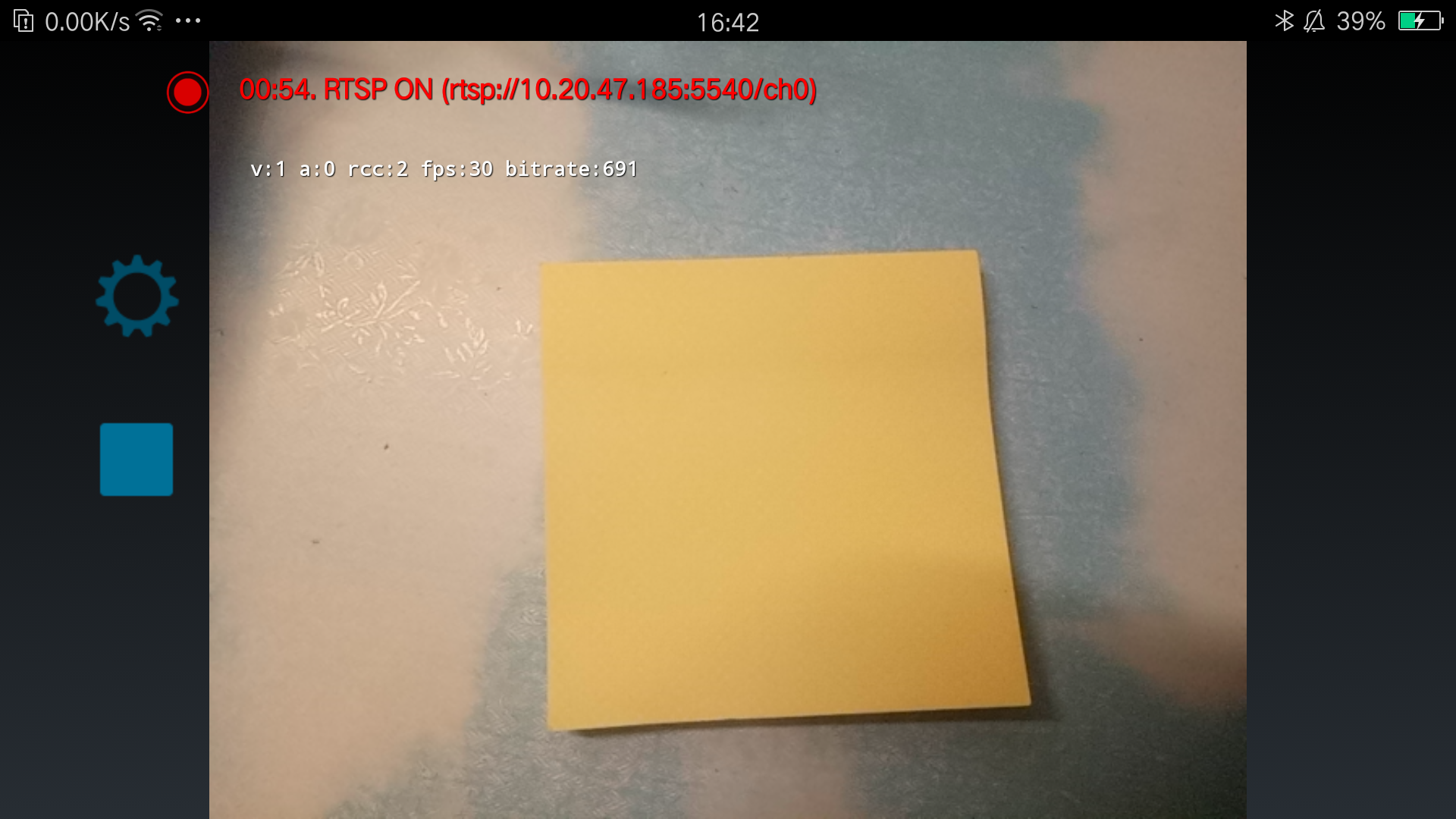
配置手机端:(一般默认即可RTSP)
2、源码下载(rocon_devices_kinetic)
将文件解压在catkin_ws/src文件夹;
3、编译
catkin_make
4、配置
source xxx/devel/setup.bash (×××是路径)
5、查看手机端接口,并配置
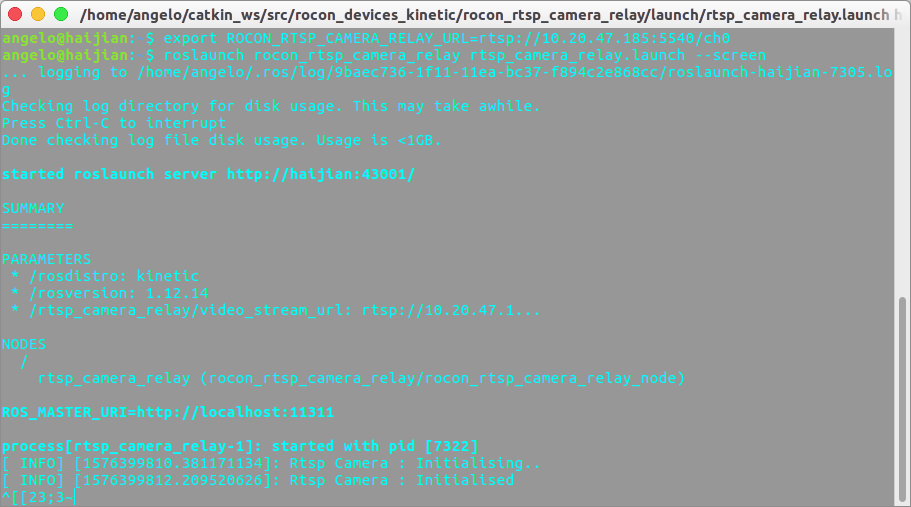
export ROCON_RTSP_CAMERA_RELAY_URL=rtsp://×××:5540/ch0 (×××是IP)
6、运行驱动
roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch --screen
7、查看ros接口
rostopic list
/rosout
/rosout_agg
/rtsp_camera_relay/camera_info
/rtsp_camera_relay/image
/rtsp_camera_relay/image/compressed
/rtsp_camera_relay/image/compressed/parameter_descriptions
/rtsp_camera_relay/image/compressed/parameter_updates
/rtsp_camera_relay/image/compressedDepth
/rtsp_camera_relay/image/compressedDepth/parameter_descriptions
/rtsp_camera_relay/image/compressedDepth/parameter_updates
/rtsp_camera_relay/image/theora
/rtsp_camera_relay/image/theora/parameter_descriptions
/rtsp_camera_relay/image/theora/parameter_updates
/rtsp_camera_relay/status
8、数据可视化
rosrun image_view image_view image:=/rtsp_camera_relay/image

过程可能遇到错误:
error while loading shared libraries: libopencv_core3.so.3.3: cannot open shared object file: No such file or directory
解决方法:
①打开路径/etc/ld.so.conf.d
②创建文件OpenCV.conf
③在OpenCV.conf中写入:opencv文件夹lib的路径
④在终端执行命令:
sudo ldconfig